Материал: 2) Межфазный перенос
2.3.6 Понятие о сопряженном физическом и математическом моделировании
Этот метод разработан в КГТУ профессором С.Г. Дьяконовым.
Сопряженное физическое и математическое моделирование базируется на принципе иерархичности (многоуровневости) пространственно-временных масштабов явлений , протекающих в промышленном аппарате, и как следствие этого, на «слабости» взаимодействия явлений различных масштабов. «Слабость» заключается в отсутствии влияния взаимодействия их на структуру математического описания явления, влияние может учитываться лишь через изменение некоторых параметров.
В этом методе аппарат представляется в виде системы, состояний из характерных зон (областей). Математическое описание каждой зоны устанавливается при ее физическом моделировании на лабораторном макете. При это оно содержит параметры, учитывающие взаимодействие между зонами. Предполагается , что структура математического описания каждой из зон при изменении масштаба не меняется , меняются лишь значения параметров.
Задача отыскания полей w,T,p,ci в аппарате заменяется определением параметров при известной структуре математического описания.
Основные этапы нового метода моделирования: -выделение характерных зон аппарата;
-экспериментальное изучение отдельных зон на физических моделях; -составление математических моделей зон, их идентификация по данным
физического эксперимента; -синтез математической модели аппарата в целом, ее идентификация на
основе удовлетворения исчерпывающему описанию; -проверка адекватности модели, при необходимости - коррекция;
-использование модели для проектирования и оптимизации промышленного аппарата.
Основное достоинство предлагаемого метода: переход к одноуровневой схеме проектирования промышленных аппаратов – лабораторная модель – промышленный аппарат.
2.4Гидродинамическая структура потоков
2.4.1Характеристика структуры потока
Наибольший вклад в проблему масштабного перехода вносит изменение гидродинамической структуры потоков при увеличении размеров аппарата. Отыскание поля скоростей по дифференциальным уравнениям вызывает большие математические трудности. Поэтому, в инженерной практике используют метод моделирования гидродинамической структуры потоков в аппаратах.
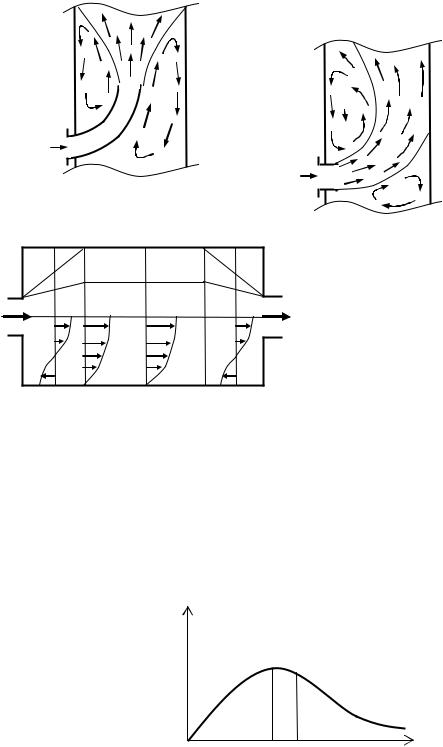
Структура потока - характер движения элементов потока в аппарате. Траектории движения этих элементов могут быть чрезвычайно сложными, что приводит к различному времени их пребывания в аппарате. Одни элементы быстро проходят через аппарат (байпас), другие, наоборот, задерживаются в аппарате больше среднего времени (застойные зоны), могут быть также возвратные потоки
(рис. 2.9).
1 |
2 |
3 |
|
|
|
|
|
4 |
1– застойная зона;
2– зона смешения;
3– пограничный слой;
4– ядро потока.
Рис. 2.9 Поля скорости в аппаратах различной формы
Охарактеризовать структуру потоков в аппарате можно полем скорости. Из-за сложности отыскания поля скорости структуру потока обычно характеризуют временем пребывания элементов потока в аппарате. Поскольку различные элементы имеют различные скорости и траектории движения, то и обладают различными временами пребывания в аппарате. Для описания этого явления используется функция распределения времени пребывания элементов потока в аппарате f(t) (рис.
2.10):
f(t)
|
|
|
t |
||
tв t |
|||||
Рис. 2.10 Функция распределения времени пребывания |
|||||
f ( t ) |
dN( t ) |
. |
(2.144) |
||
|
|||||
|
|
|
Ndt |
|
|
Здесь dN(t) – количество элементов потока, время пребывания которых в аппарате от t до t+dt ; N – общее количество выделенных элементов в потоке.

|
|
|
V& (Va – объем аппарата, |
Среднее время пребывания элементов в потоке t V |
|||
|
|
a |
|
V& - объемный расход) может быть найдено: |
|
||
|
|
|
|
t t f ( t )dt . |
(2.145) |
||
0
Наиболее вероятное время пребывания элемента в аппарате tВ соответствует максимальному значению f(t).
На практике удобнее использовать безразмерное время пребывания и безразмерную функцию распределения f*( ) :
|
|
t |
|
|
f * ( ) |
|
|
|
|
|
|
, |
t f ( ) . |
(2.146) |
|||||
|
|
|
|||||||
t |
|||||||||
|
|
|
|
|
|
|
|||
2.4.2 Математическое моделирование структуры потоков
Наиболее корректной математической моделью структуры потоков в аппарате является исчерпывающее описание. Однако решение уравнений Навье – Стокса с условиями однозначности для большинства случаев невозможно. Поэтому на практике идут по пути упрощения модели, используя для характеристики структуры потока функцию распределения времени пребывания элементов потока в аппарате. Разумеется, f*( ) является далеко не полной характеристикой движения, хотя и достаточной для интегральной оценки работы аппарата.
Можно выделить две идеализированные модели, характеризующие предельные ситуации: идеальное вытеснение и идеальное смешение, а также более реалистичные модели промежуточного типа - ячеечная и диффузионная модели.
2.4.2.1Модель идеального вытеснения (МИВ)
Ваппарате частицы потока движутся параллельно друг другу с одинаковой
скоростью wX . Время пребывания в аппарате всех элементов потока одинаково. Введем понятие концентрации меченых элементов потока в аппарате. Средняя концентрация меченых элементов потока в аппарате определяется как:
C |
0 |
|
N м |
, |
(2.147) |
|
|||||
|
|
Va |
|
||
|
|
|
|
||
где NM - количество помеченных элементов, Va – объем аппарата.
wx
|
|
|
Схема потока |
|
|
|
|
|
L |
|
|
|
|
|
|
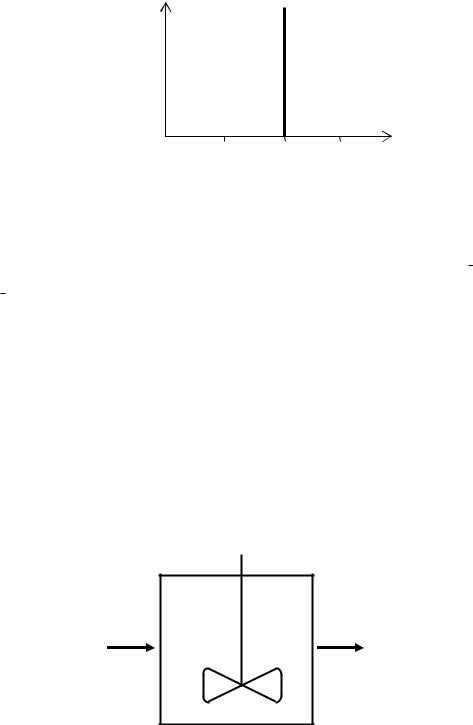
Рис. 2.11 Модель идеального вытеснения
Исходное уравнение для МИВ получено из уравнения нестационарной
конвективной диффузии (2.40): |
|
|
|
C |
wx |
C . |
(2.148) |
t |
|
x |
|
Результаты решения уравнения (2.148) представлены в безразмерной форме на рис. 2.12.
f*(Θ)
0 |
0.5 |
1.0 |
1.5 |
Θ |
Рис. 2.12 Вид функции распределения f*( ) для МИВ
Поскольку все элементы движутся с одинаковой скоростью wX , то у них одинаковое время пребывания в аппарате, совпадающее с t L wx . Поэтому
wx . Поэтому
t t 1 .
t 1 .
Наиболее близка к МИВ структура турбулентного потока, движущегося по трубе при l/d>>1, цилиндрические аппараты небольшого диаметра, но значительной высоты, заполненные зернистым материалом.
2.4.2.2 Модель идеального смешения (МИС)
Предполагается, что любая порция входящего в аппарат меченых элементов потока мгновенно и равномерно перемешивается во всем объеме. Таким образом, концентрация меченых элементов потока одинакова во всех точках аппарата. По аналогии с (2.31) (источника нет) можно записать:

|
Рис. 2.13 Модель идеального смешения (схема потока) |
|||||||
|
|
dN м |
& |
& |
|
dC |
|
|
|
|
dt |
M Nвх M Nвых Va |
dt |
, |
(2.149) |
||
где M Nвх ,M Nвых – количество меченых |
элементов потока, |
входящих в |
||||||
& |
& |
|
|
|
|
|
|
|
аппарат и выходящих из него за единицу времени.
При любых значениях t>0 , входа меченых элементов в аппарат не будет, т.е. M& Nвх 0 . Тогда
|
dC |
& |
& |
|
|
Va |
dt |
M Nвых V |
C . |
(2.150) |
|
Имея, в виду V& Va 1
Va 1 t получим:
t получим:
dCdt Ct и разделяя переменные:
dC |
|
dt |
. |
(2.151) |
||
C |
|
|
|
|||
|
||||||
|
t |
|
||||
Интегрируя уравнение (2.151) с начальными условиями С( )=С0 получим:
|
|
|
|
t |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
||||
C C |
0 |
e |
|
t . |
(2.152) |
||
|
|
|
|
|
|
|
|
Переходя, к безразмерной функции распределения имеем:
f * ( ) e . |
(2.153) |
На рис. 2.14 изображена зависимость f*( ) от по формуле (2.153).