Материал: 1925
наблюдения за поведением системы при случайных изменениях входных параметров, то он называется пассивным. Если же при проведении эксперимента входные параметры изменяются по заранее заданному плану, то такой эксперимент называется активным. Объект, на котором возможен активный эксперимент, называется управляемым. На практике не существует абсолютно управляемых объектов. На реальный объект обычно действуют как управляемый, так и неуправляемый факторы. Неуправляемые факторы действуют на воспроизводимость эксперимента. Если все факторы неуправляемы, возникает задача установления связи между параметром оптимизации и факторами по результатам наблюдений или по результатам
пассивного |
эксперимента. |
Возможна |
также |
плохая |
||
воспроизводимость изменения факторов во времени. |
|
|||||
|
|
|
|
И |
|
|
|
6.4. Варьирование факторов |
|
|
|||
При |
проведении |
|
Д |
|
задается |
|
активного |
эксперимента |
|||||
определенный план варьирования факторов, т. е. эксперимент заранее |
||||
планируется. |
|
|
А |
|
|
|
|
|
|
Точке плана с номером i соответствует вектор-строка |
|
|||
→ |
б |
|
||
и |
|
(6.2) |
||
X i1 |
= ( Xi1 ,Xi2 ,...,Xin ). |
|||
Общая совокупность таких векторов X (i = 1, … , L) образует
i
план экспериментаС, а совокупность различных векторов, число которых обозначим N, − спектр плана.
В активном эксперименте факторы могут принимать только фиксированные значения. Фиксированное значение фактора называют уровнем фактора. Количество принимаемых уровней факторов зависит от выбранной структуры факторной модели и принятого плана эксперимента. Минимальный Xjmin и максимальный Хjmах, j = l, …, n (n − число факторов), уровни всех факторов выделяют в факторном пространстве некоторый гиперпараллелепипед, представляющий собой область планирования. В области планирования находятся все возможные значения факторов, используемые в эксперименте.
136
|
→ |
→ |
Вектор |
X0= (X10, |
X02 ..., ,X0n) задает точку центра области |
планирования. Координаты этой точки обычно выбирают из соотношения
X 0j |
= |
( X jmax + X jmin ) |
. |
(6.3) |
|
2 |
|||||
|
|
|
|
Точку Х0 называют центром эксперимента. Она определяет основной уровень факторов Хj0, j = 1, … , n. Центр эксперимента стремятся выбрать как можно ближе к точке, которая соответствует искомым оптимальным значениям факторов. Для этого используется
априорная информация об объекте. |
И |
Xj называют |
|
Интервалом (или шагом) варьирования фактора |
|||
величину, вычисляемую по формуле |
Д |
|
|
|
|
|
|
∆X j = (X jmax − X jmin ), |
j = 1, …, n. |
(6.4) |
|
2 |
|
|
|
Факторы нормируют, а их уровни кодируют. В кодированном
виде верхний уровень обозначают +1, нижний –1, а основной 0. |
|||||||
|
б |
|
|
|
|||
Нормирование факторов осуществляют на основе соотношения (рис. 6.2) |
|||||||
|
|
(xj |
− АX j ) |
|
|
||
и |
0 |
|
j = 1, …, n. |
(6.5) |
|||
xj |
= |
∆ X j |
|
, |
|
|
|
С |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
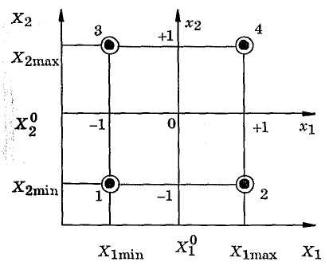
Рис. 6.2. Геометрическое представление области планирования при двух факторах
137

Точки 1, 2, 3, 4 являются точками плана эксперимента.
Например, значения факторов Х1 и Х2 в точке 1 равны соответственно
X1min и Х2min, а нормированные их значения xlmin = –1; х2min = –1.
После установления нулевой точки выбирают интервалы
варьирования факторов. Это связано с определением таких значений факторов, которые в кодированных величинах соответствуют +1 и –1. Интервалы варьирования выбирают с учетом того, что значения факторов, соответствующие уровням +1 и –1, должны быть достаточно отличимы от значения, соответствующему нулевому уровню. Поэтому во всех случаях величина интервала варьирования должна быть больше удвоенной квадратичной ошибки фиксирования данного фактора. С другой стороны, чрезмерное увеличение величины интервалов варьирования нежелательно, т. к. это может
привести к снижению эффективности поиска оптимума. Очень малый
варьирования факторов в области экспериментаДИ. От числа уровней зависят объем эксперимента и эффективность оптимизации.
интервал варьирования уменьшает область эксперимента, что
замедляет поиск оптимума. При выборе интервала варьирования
целесообразно учитывать, если это возможно, число уровней
План эксперимента удобно представлять в матричной форме. Матрица спектра плана – это матрица, в которую входят
только различающиеся между собой строки матрицы плана.
Размерность матрицы спектра плана N х n, где N – число точек плана, |
|||||||||||
различающихся между со ой хотя ы одной координатой U. |
|||||||||||
Матрица спектра плана |
А |
|
|
||||||||
|
меет вид |
|
|
||||||||
|
X1 |
|
б |
|
|
|
|
||||
|
|
|
|
|
|||||||
|
|
X11 |
|
|
|
|
|
|
|
||
|
X 2 |
|
X |
X |
22 |
|
|
|
|
||
|
и21 |
|
|
|
|
|
|
||||
X = |
... |
.... ... ... ... ... ... |
. |
||||||||
X i |
= X |
i1 |
X |
i2 |
... |
Xij ...X |
in |
||||
|
|
|
|
|
|
(6.6) |
|||||
|
... |
|
|
|
|
|
|
|
|
|
|
С ..... ..... ....... ....... |
|
||||||||||
|
X N |
|
X N1 X N 2 ... |
X Nj ...X Nn |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Матрица плана представляет собой прямоугольную таблицу, содержащую информацию о количестве и условиях проведения опытов. Строки матрицы плана соответствуют опытам, а столбцы – факторам. Размерность матрицы плана L х n, где L – число опытов; n – число факторов. При проведении повторных (дублирующих) опытов в одних и тех же точках плана матрица плана содержит ряд совпадающих строк.
138
6.5. Структура экспериментальной факторной модели
Под структурой экспериментальной факторной математической модели понимается вид математических соотношений между факторами X, Z и откликом Y. В качестве факторов принимают внутренние и внешние параметры технической системы, подлежащие оптимизации в процессе ее проектирования. Внутренние параметры системы – это параметры ее элементов, внешние – это параметры внешней среды, в условиях воздействий которой осуществляется функционирование системы. Функциями отклика Y являются выходные параметры технической системы, характеризующие ее эффективность и качество процессов функционирования. Выходные параметры системы принимаются в качестве критериев оптимальности.
Структура факторной модели выбирается на основе априорной информации, используя принцип постепенного ее усложнения. Параметры факторной математической модели определяются методами регрессионного анализа. При определении параметров
этими методами нет необходимости различать виды факторов, т. е. |
||
подразделять факторы на управляемые X |
И |
|
и неуправляемые Z. Поэтому |
||
в дальнейшем все они будут обозначаться буквой X. Тогда факторную |
||
Д |
|
|
модель можно представить векторным уравнением регрессии вида |
||
А |
. |
(6.7) |
б= , |
используются |
результаты |
Для определен я параметров |
||
эксперимента. Результаты эксперимента можно представить |
||||
и |
|
|
|
|
функцией вида |
|
|
|
|
С |
= |
. |
(6.8) |
|
|
+ |
|
|
|
В качестве базисных функций экспериментов используют переменные простейших полиномов, системы ортогональных полиномов, тригонометрические функции. Наиболее часто пользуются простейшими полиномами первой и второй степеней. Например, полином первой степени, описывающий функцию отклика у при двух факторах х1 и х2 , может иметь вид
y = b0 + b1 x1 + b2 x2 |
(6.9) |
или |
|
y = b0 + b1 x1 + b2 x2 + b3 x1 x2. |
(6.10) |
139
Полином второй степени будет иметь вид
y = b0 + b1 x1 + b2 x2 + b3 x1 x2 + b4 x12 + b5 x22. |
(6.11) |
||||
Базисные функции в случае использования последнего |
|||||
выражения имеют вид |
|
|
|
|
|
|
|
f0(X) = 1; |
|
|
|
|
f1(X) = x1; |
|
|
||
|
f2(X) = x2; |
|
|
||
|
f3(X) = x1 |
∙ x2; |
|
(6.12) |
|
|
f4(X) = x12; |
|
|
||
|
f5(X) = x22. |
И |
|
||
|
|
|
|
|
|
6.6. План однофакторного эксперимента |
|
||||
|
|
|
Д |
|
|
Однофакторный (классический) эксперимент предназначен для |
|||||
получения линейной экспериментальной факторной модели вида |
|||||
|
|
А |
|
(6.13) |
|
y = b0 |
+ b1 x1 |
+ b2 x2 |
+... + bn xn . |
||
Однофакторный |
б |
предусматривает поочередное |
|||
эксперимент |
|||||
и |
|
|
|
|
|
варьирование каждого |
з факторов при фиксированных на некотором |
||||
уровне значениях остальных факторов. Фактор Хi варьируют на двух |
|||||||
С |
|
|
|
|
|
||
уровнях XiB и XiH, |
все остальные при этом должны находиться в точке |
||||||
центра эксперимента Xj0, j ≠ i. Для нормированных факторов xjB= +1; |
|||||||
xiH = –1; xj = 0. |
учетом этого составим матрицу спектра плана |
||||||
однофакторного эксперимента. |
|
|
|
|
|
||
|
|
−1 |
0 |
... |
0 |
|
|
|
|
|
|
||||
|
|
+1 |
0 |
... |
0 |
|
|
|
|
0 |
−1 |
... |
0 |
|
|
|
X = |
0 |
+1 |
... |
0 |
. |
(6.14) |
|
|
... ... ... ... |
|
|
|||
|
|
0 |
0 |
... |
−1 |
|
|
|
|
0 |
0 |
... |
+1 |
|
|
140