Материал: 1798
46
Рис.3.3
Согласно основному закону динамики
G = m a = m an .
Именно сила веса
вданном случае является движущей силой, которая вызывает ускорение а, но
всвою очередь G = mg. Подставив значение G и
an v2 r в основное уравнение и решив его
r в основное уравнение и решив его
относительно скорости, получим
g an v2 r ; g v2
r ; g v2 r ; v
r ; v 
 g r .
g r .
Из полученного уравнения видно, что если нормальное ускорение равно ускорению свободного падения, то наступает равновесие, которому
соответствует скорость v 
 g r. На этом задача окончена.
g r. На этом задача окончена.
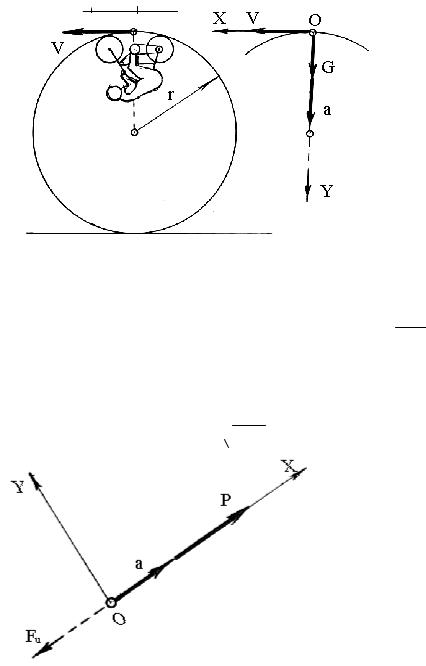
Вернемся к рис. 3.1. Равнодействующая сила Р = F1 + F2 + . . . + Fn сообщает материальной точке ускорение а. Расположим систему координат таким образом, чтобы ось OX совпала с ускорением а (рис. 3.4).
Среди действующих сил могут быть активные силы Fi и реакции
связей Ri, т.е.
Рис.3.4
n k
P Fi Ri .
i 1 i 1
Согласно основному закону динамики
P = m a .
Перенесем вектор ma в левую часть уравнения, получим
P m a 0 . |
(3.9) |
47
Вектор m a имеет размерность силы.
Что же представляет собой эта сила? Вопервых, наличие этой силы уравновешивает систему сил F1 + F2 + . . . + Fn = Р . Вовторых, сила m a имеет знак минус, поэтому она направлена в сторону, обратную равнодействующей Р и ускорению а. В - третьих, по величине (модулю) эта сила равна равнодействующей Р.
Сила, равная по величине произведению массы материальной точки на ее ускорение, но направленная в сторону, противоположную ускорению, называют силой инерции.
Fu = m a . |
(3.10) |
На основании сказанного можно сделать вывод, который называется принципом Даламбера:
Силы, приложенные к материальной точке, уравновешиваются силой инерции
|
n |
k |
|
|
P Fu |
Fi |
Ri Fu |
0. |
(3.11) |
|
i 1 |
i 1 |
|
|
Полученную систему сил можно рассматривать как находящуюся в равновесии, а уравнение (3.11) уравнением равновесия. Такое равновесие называют динамическим.
Силы инерции действительно существуют. Достаточно вспомнить поездку в автобусе или троллейбусе. При трогании с места в период разгона ускорение направлено вперед, но нас сила инерции тянет назад. При резком торможении ускорение направлено назад, но нас сила инерции толкает вперед.
Принцип Даламбера позволяет при решении задач динамики использовать уравнение равновесия статики. Такой метод носит название
кинетостатики.
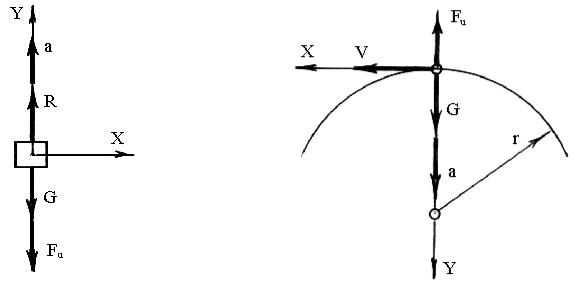
Решим примеры 1 и 2 (рис. 3.2 и 3.3) методом кинетостатики. Пример 1. Чтобы уравновесить силу G и реакцию R, приложим
силу инерции Fu = m a (рис. 3.5).
|
Уравнение равновесия будет иметь вид |
|
|
R G +F = 0 , |
(3.12) |
или |
R m g |
|
|
|
|
где |
ускорение g и сила |
|
оси |
– сила инерции |
, |
|
OY. |
|

48
Рис.3.5 |
Рис.3.6 |
Из уравнения (3.13) находим
R = m g + m a = m (g + a) .
Нужно помнить, что сила веса G – движущая сила и всегда совпадает по направлению с вызванным ускорением g, согласно основному закону динамики. Сила инерции – реактивная сила, которая порождается ускорением а и всегда направлена в сторону, обратную ускорению.
Пример 2. Чтобы уравновесить силу G (рис. 3.3), приложим силу инерции Fu = m a (рис. 3.6).
Уравнение равновесия будет иметь вид
G +Fи = 0 ,
или
m g m a g a 0 ,
где G = m g, так как ускорение g и сила G направлены в сторону оси OY; Fи = ma – сила инерции, которая направлена в сторону, противоположную оси OY.
При равномерном движении по окружности
a an v2 r.
r.
После подстановки получим
v 
 g r .
g r .
3.2. Работа и мощность
49
3.2.1. Работа постоянной силы при прямолинейном движении
Для оценки и характеристики действия силы, которая перемещает тело или материальную точку с постоянной скоростью, вводят понятие о мере этого действия – работа силы.
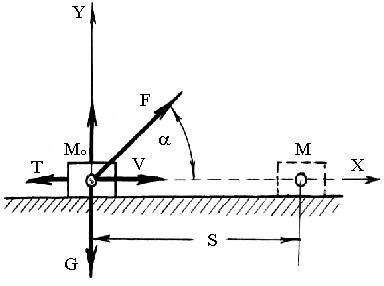
Пусть на тело (рис. 3.7) действует сила F, которая, преодолевая сопротивление трения Т, двигает тело по плоскости со скоростью v из положения M0 в положение M .
Разложим силу F на две составляющие. Вдоль оси X будет действовать составляющая Fx = F · cos , а вдоль оси Y будет действовать составляющая Fy = F · sin .
Составим два уравнения равновесия
X F · cos – T = 0 ;
Y F · sin – G+R = 0 .
Из этих уравнений определяются реакция плоскости на тело R и сила трения Т при заданных F и G.
Реакция R вызывает силу трения T f R, а составляющая
Fx=Fcos движет тело, преодолевая трение Т. На это перемещение затрачивается энергия, которая называется работой. Это понятие вводится для оценки действия силы. Мерой этого действия является работа силы, величина которой равна произведению силы на пройденный путь.
Величина работы определяется по формуле
A=Fcos · s , |
(3.14) |
где А – работа силы; F – сила, действующая на тело; – угол между направлением силы и скорости тела. Если 0, то формула (3.14) примет вид
A F s. |
(3.15) |
Работа – скалярная величина. Она измеряется в джоулях: 1 Дж =

50
1 Н м.
Сила, направленная против движения, называется силой сопротивления (трение, сопротивление воздуха, сила сопротивления при вспашке земли и т.д.). Различают силы полезного и вредного сопротивлений.
Сила полезного сопротивления – сила технологического сопротивления рабочего органа машины: сила подъема груза, сила сопротивления плуга, сила забивания сваи и т.д.
Сила вредного сопротивления – это сила трения, сила сопротивления воздуха или воды и т.д.
3.2.2. Мощность и коэффициент полезного действия
Два человека копают огороды по 500 м2 каждый. Один вскопал огород за полдня, а другой – за день. Кто из них более работоспособен, более мощный? То же можно сказать о тракторах. Следовательно, знание только величины работы для оценки работоспособности недостаточно. Для характеристики быстроты совершения работы вводится понятие мощности.
Мощностью называется величина, выражающая работу, произведенную в единицу времени.
N A t . |
(3.16) |
Если сила совпадает с направлением движения (3.15), то мощность можно определить по формуле
N F s F v. |
(3.17) |
t |
Единицей мощности в системе СИ является ватт:
1Вт 1Дж 1Н м .
сс
Втехнике применяется единица мощности, именуемая лошадиной
силой, 1 л.с. = 75 кгс м/с .
1 л. с. = 736 Вт = 0,736 кВт . 1 кВт = 1,36 л. с.
Если машина работает с постоянной мощностью, то работа, совершаемая за время t, равна
A = N t .