Материал: 1760
использованных входных и выходных портов соответственно;
Рис. 2.7. Раздел Signal & Systems
Reshape – блок, позволяющий изменить размерность входного сигнала;
Data Type Conversion – блок, обеспечивающий приведение типа данных входного сигнала к требуемому;
Function-Call Generator – блок, обеспечивающий запуск подключенных к нему подсистем с заданной периодичностью;
Configurable Subsystem – блок, реализующий функцию любой подсистемы, которая может быть библиотечной или созданной пользователем;
Model info – блок, позволяющий получить информацию о модели;
IC – блок, позволяющий установить начальное значение входного сигнала, значение которого задается в окне настройки;
Width – блок, вычисляющий размерность сигнала на входе;
Probe – блок, позволяющий получить на выходе необходимую информа-
21
цию о входном сигнале. Блок имеет один вход, число выходов зависит от числа исследуемых параметров входного сигнала;
Signal Specification – блок, управляющий процессом моделирования в зависимости от параметров входного сигнала.
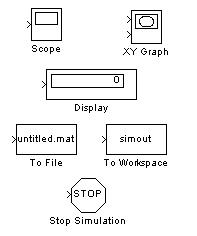
2.2.7.Sinks – раздел блоков получателей сигналов
Display – блок, отображающий цифровую информацию (уровень сигнала в данный момент времени);
Scope – виртуальный осциллограф, предназначенный для получения временных зависимостей (переходных процессов);
XY Graph – виртуальный графопостроитель (построение фазовых портретов и различных двухмерных графиков);
Рис. 2.8. Раздел Sinks
To File и To Workspace – блоки, передающие информацию в файл или в рабочую область MATLAB;
Stop Simulink – остановка симуляции.
2.2.8.Sources – раздел блоков источников сигналов
Band-Limited White Noice – генератор белого шума;
Chrip Signal – генератор сигнала с нарастающей частотой;
Constant - источник постоянного воздействия, задающий константу (t < 0, y = 0; t 0, y = сonst);
Discrete Pulse Generator – источник дискретных импульсов;
From File и From Workspace - источником сигнала для этих блоков служит файл или рабочая область MATLAB;
Ramp – источник нарастающего воздействия;
22
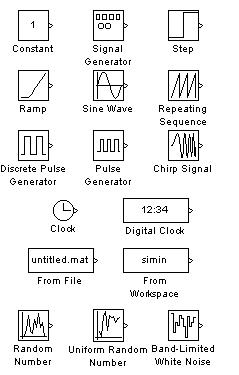
Рис. 2.9. Раздел Sources
Random Number – источник случайного сигнала с нормальным распределением;
Repeating Sequence – источник пилообразного сигнала;
Sine Wave – источник синусоидального воздействия;
Step – источник перепада сигнала (t < Step time, y = Initial value; t > Step time, y = Final value);
Signal Generator – универсальный сигнал-генератор;
Clock – источник времени моделирования;
Digital Clock – цифровой источник времени.
2.2.9. Библиотека Simulink Extras
Библиотека Simulink Extras является дополнительной библиотекой пакета Simulink. Эта библиотека содержит наборы блоков с более широкими функциями, чем рассмотренные ранее разделы основной библиотеки. Тем не менее это вовсе не означает, что применение этой библиотеки всегда предпочтительнее. Связано это с тем, что усложнение функций блоков, полезное при решении ряда специфических задач, оборачивается усложнением моделирования при решении большинства обычных задач.
Библиотека Simulink Extras представлена на рис. 2.10. Работа с этой библиотекой ничем не отличается от работы с основной библиотекой.
23
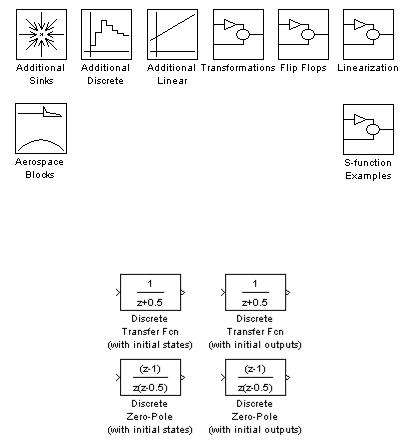
Рис.2.10. Библиотека Simulink Extras
2.2.9.1. Additional Discrete – дополнительные дискретные блоки
Рис. 2.11. Дополнительные дискретные блоки
Дополнительные блоки Additional Discrete представлены всего четырьмя блоками – по два варианта известных нам блоков Discrete Transfer Fcn и Discrete Zero-Pole (рис 2.11). Их единственным отличием от описанных ранее блоков является возможность инициализации входов и состояний.
2.2.9.2. Additional Linear – дополнительные линейные блоки
Состав дополнительных линейных блоков раздела Additional Linear показан на рис. 2.12. Блоки этого раздела можно разделить на две катего-
рии: PID-контроллеры и блоки типа State-Shfct, Transfer Fnc и Zero-Pole,
дополненные возможностями выходных сигналов и состояний.
Для анализа и синтеза систем управления наибольший интерес представляют PID-контроллеры. Первый из них PID-controller – это довольно универсальный блок, выходной сигнал которого задается операторным выражением:
OUT = P + I / s + Ds,
где Р – входной сигнал; I – его интеграл; D – его производная.
24
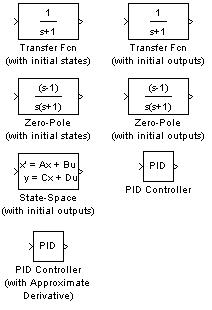
Рис. 2.12. Дополнительные линейные блоки
Параметр Р (по умолчанию 1) фактически задает коэффициент усиления безынерционного усилительного звена. Параметр I задает пропорциональность интегралу входного сигнала и, наконец, параметр D задает пропорциональность производной входного сигнала. Параметры P, I и D задаются в таблице настройки PID-контроллера, поэтому задавая различные значения указанных параметров, можно получить П -, ПИ -, ПД - и ПИД - регуляторы .
Второй PID-controller (with Approximate Derivative) c улучшенной опе-
рацией дифференцирования вычисляет выходной сигнал как:
OUT = Р + I / s + Ds/(1/Ns + 1).
За счет применения дополнительного параметра N улучшается вычисление производной.
2.2.9.3. Дополнительные блоки Additional Sinks
Раздел дополнительных блоков Additional Sinks содержит ряд новых виртуальных регистраторов ( рис. 2.13):
Auto Correlator – автокоррелятор (используется с пакетом Signal Processing Toolbox);
Averaging Power Spectral Density – анализатор спектральной плотности мощности с усреднением;
25