Материал: 1760
2.2.Блоки библиотеки Simulink
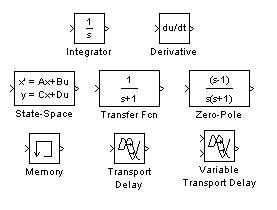
2.2.1.Continuous – раздел непрерывных блоков
Рис. 2.3. Раздел Continuous
Всостав раздела непрерывных блоков входят (рис 2.3):
Derivative – дифференцирующий блок;
Integrator – интегрирующий блок;
Transport Delay – блок постоянного запаздывания;
Transfer Fcn – блок, реализующий передаточную функцию, заданную в виде отношения полиномов (апериодическое и колебательное звенья);
State-Space – линейная аналоговая система, заданная в виде уравнений состояния, т. е. в виде системы уравнений, представленной в форме Коши;
Zero-Pole – линейная аналоговая система, заданная своими нулями и полюсами;
Memore – блок памяти, выполняющий задержку на один шаг модельного времени;
Variable Transport Delay – блок памяти с переменной задержкой.
2.2.2.Discrete – раздел дискретных блоков
Discrete Transfer Fcn - блок, реализующий передаточную функцию, заданную в виде отношения полиномов (апериодическое и колебательное звенья), для дискретных САУ;
Discrete Time Integrator – интегрирующий блок для дискретных САУ. Выполняет численное интегрирование входного сигнала;
Zero-Order-Hold –экстраполятор нулевого порядка;
Unit Delay – блок задержки сигнала. Обеспечивает задержку входного сигнала на заданное число шагов модельного времени;
Discrete State-Spase – блок задания дискретного звена матрицами его состояния;
16
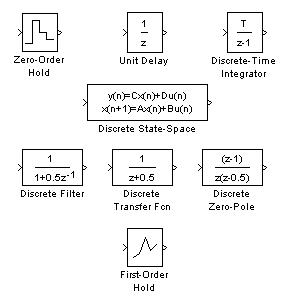
Рис. 2.4. Раздел Discrete
Discrete Filter – блок задания дискретного звена через дискретную передаточную дробно-рациональную функцию относительно 1/Z;
Discrete Zero-Pole – блок задания дискретного звена через указание значений нулей и полюсов дискретной передаточной функции относительно
1/Z;
First-Order Hold – экстраполятор первого порядка.
2.2.3.Function & Tables – раздел блоков функций и таблиц
Fcn – блок, реализующий в пакете Simulink любую функцию системы MATLAB, где в качестве параметра настройки можно ввести любое вычисляемое выражение, аргументом которого выступает входной сигнал;
MATLAB Fcn – подобен предыдущему блоку, но также позволяет реализовывать m-функции (программы, написанные на языке программирования
MATLAB);
Look-Up Table, (2-D) и (n-D) – блоки данных, заданных в виде таблиц (позволяют задать нелинейные блоки любого вида), отличаются друг от друга размерностью задающих таблиц. Все эти блоки выполняют различного вида интерполяции.
2.2.4.Math – раздел математических блоков
Gain – усилительный блок;
Sum – сумматор сигналов с различными знаками и любым количеством входов;
17
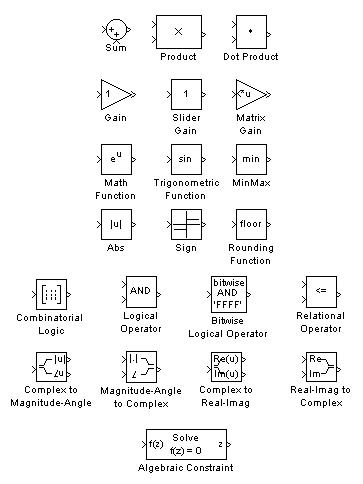
Product – вычислитель, формирующий на выходе результат умножения или деления двух и более входных сигналов. В качестве параметров настройки указывается число входов и вид выполняемой операции;
Dot Product – звено, осуществляющее перемножение двух входных величин, если они являются скалярами. Это звено вычисляет также сумму поэлементных произведений двух входных векторов одинаковой длины;
Slider Gain – аналоговый усилитель с интерактивной настройкой;
Matrix Gain – усилитель, на вход которого подается вектор;
Mat Function – блок, позволяющий выбрать одну из математических функций в поле настройки и включить ее в модель;
Trigonometric Function – звено формирования тригонометрических функций от входного сигнала. Выбор функции обеспечивается в поле настройки;
Рис. 2.5. Раздел Math
MinMax – блок выбирает минимальное или максимальное значение вектора в соответствии с заданием поля настройки. Входной сигнал на блок задается числовым вектором. В окне настройки определяется также количество входов;
18
Abs – блок, формирующий на выходе абсолютное значение входного сигнала;
Sign – блок-реле, реагирующий на знак входного сигнала;
Rounding Function – округление входного сигнала;
Combinatorial Logic – блок обеспечивает преобразование входного сигнала в соответствии с формированной в окне настройки таблицей истинности;
Logical Operation? Relaition Operator – блоки производят известные ло-
гические операции «и» и «или», количество входов задается в поле настройки;
Bitwise Logical Operator – универсальный блок, реализующий любую логическую функцию;
Complex to Magnitude-Angle – блок, позволяющий выделить модуль и фазу входной комплексной величины;
Magnitude-Angle to Complex – блок, преобразующий входную величину, заданную модулем и фазой в комплексную выходную величину;
Complex to Real-Image, Real-Image to Complex – блоки, преобразующие комплексные величины из показательной формы в алгебраическую и обратно;
Algebraic Constrain – блок, позволяющий в структурную модель включать систему алгебраических уравнений.
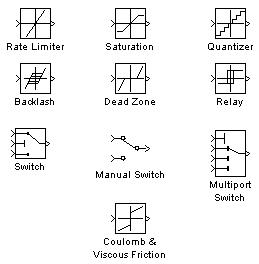
2.2.5.Nonlinear – раздел нелинейных блоков
Рис. 2.6. Раздел Nonlinear
Saturation – блок ограничения;
Dead Zone – блок с зоной нечувствительности;
Relay – релейный блок;
19
Rate Limiter – блок с ограничением скорости;
Coulomb and Viscous Friction – блок фрикционных эффектов;
Backlash – блок люфта;
Switch и Multiport Switch – переключатели одно- и многовходовые;
Quantizer – блок, обеспечивающий квантование входного сигнала по уровню. В системах управления такие блоки являются частью аналогоцифрового преобразователя;
Manual Switch – блок, который переключается вручную. В процессе моделирования при помощи этого ключа удобно менять параметры и структуру модели;
Coulumb & Viscous Friction – блок, реализующий характеристику трения в механических системах.
2.2.6.Signal & Systems – раздел блоков сигналов и систем
Sub System – блок-подсистема (полезен в случае громоздких систем, части которых можно с помощью данного блока заменить на один или несколько блоков-подсистем);
In, Out – блоки входа/выхода, предназначенные для создания блоковподсистем;
Mux – микшер сигналов, собирающий несколько сигналов в одну шину;
Demux – блок, выполняющий действие, обратное действию предыдущего блока;
Enable, Trigger – блоки, предназначенные для логического управления работой модели;
Bus Selector – блок выделяет из присоединенной к его порту шины требуемые сигналы. В окне настройки блока имеется два списка – входной и выходной;
Selector – блок выбирает из входного вектора элементы, которые указаны в параметрах настройки;
Merge – блок, осуществляющий объединение входных сигналов;
Matrix Concatenation – блок, позволяющий векторный сигнал, представленный развернутой строкой или столбцом, преобразовать к «свернутому» векторному сигналу;
From, Goto Tag Visibility, Goto – блоки ( «Принять», «Признак видимо-
сти», «Передать» ) используются совместно и предназначены для обмена между различными данными модели с учетом их доступности;
Data Store Memory, Data Store Read, Data Store Write – «Память», «Чте-
ние» и «Запись» данных, также используются совместно и обеспечивают хранение и передачу данных;
Ground, Terminator – блоки используются в качестве «заглушек» для не-
20