Материал: 1760
1. В основном окне MATLAB выполнить следующие команды: t=0:0.1:50; – задаем вектор времени (от 0 до 50 с, с шагом 0,1); plot(t,In) – построить график случайного процесса, подаваемого
в качестве возмущающего воздействия.
Оператор “;” стоящий после команды, позволяет отключить вывод результатов этой команды на экран.
2.После выполнения этих команд появится окно Figure No.1 (рис.7.5),
вкотором и отображается график случайного сигнала. Для того чтобы получить характеристики этого сигнала, необходимо из меню окна Figure No.1 выполнить: Tools > Data Statistics, после чего появится новое окно - Data Statistics-1, в котором отображаются интересующие нас статистические параметры отдельно по осям графика (X – ось времени, Y – ось ординат случайного сигнала):
min – минимальное значение;
max – максимальное значение;
mean – математическое ожидание;
std – среднеквадратическое отклонение (квадратный корень из дисперсии, значение которой задано в параметрах блока Random Number).
Рис.7.5. График случайного процесса и его параметры на входе в САРЧ
При нажатии на квадратик напротив любой из величин появляются ли-
121

нии на графике, отображающие эту величину.
Нас интересуют параметры случайного сигнала, поданного на вход системы, то есть ось Y. Можно убедиться, что математическое ожидание близко к 0,5 и составляет 0,4973 (при увеличении количества точек оно стремится к заданному, равному 0,5) и среднеквадратическое отклонение, равное квадратному корню из дисперсии, составляет 0,1 (
 0,01 0,1).
0,01 0,1).
Из-за особенностей пакета Data Statistics необходимо проверять значение среднеквадратического отклонения, для этого в основном окне MATLAB выполняем команду std(In,1), при этом выдается значение 0,9999, что очень близко к заданной его величине.
3.Для анализа выходного сигнала необходимо выполнить следующие команды:
t1=3:0.1:50; – задаем вектор времени (от 3 до 50 с, с шагом 0,1), так как переходный процесс по возмущению составляет 1,37 с, то анализируем выход без влияния переходного процесса по управлению и берем не менее чем двукратный запас по времени;
Out1=Out(30:500); – вычленяем из выходного массива выходной сигнал, без влияния переходного процесса по управлению, то есть отбрасываем 30 первых точек (первый операнд в скобках − это начальная точка, равная начальному времени из предыдущей команды, деленному на шаг времени, второй операнд – конечная точка, равная времени моделирования, деленному на шаг времени);
plot(t1,Out1) – построить график случайного процесса на выходе из САРЧ;
std(Out1,1) – уточняем значение среднеквадратического значения.
4.В окне Figure No.1 появляется график случайного процесса на выходе из САРЧ, а в окне Data Statistics – характеристики этого процесса, без влияния переходного процесса по управлению (рис.7.6).
Получены следующие характеристики:
минимальное значение равно 0,9978;
максимальное значение равно 1,002;
математическое ожидание равно 1;
среднеквадратическое отклонение равно 6,7556 10-4 (уточненное значение);
дисперсия равна (6,7556 10-4)2 = 4,5638 10-7.
Таким образом, в качестве возмущающего сигнала использовался случайный сигнал с параметрами: математическое ожидание, равное 0,5, то есть момент нагрузки на валу двигателя в среднем равен половине от максимально возможного; минимальный момент нагрузки равен 0,1833 от максимально возможного и максимальный момент нагрузки равен 0,7802 от максимально возможного.
122
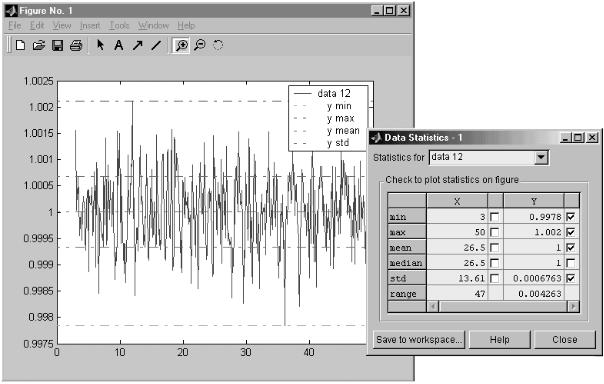
Рис.7.6. График случайного процесса и его параметры на входе в САРЧ
При прохождении возмущающего сигнала через систему он изменяется и частота вращения от возмущающего воздействия в среднем не изменяется, так как математическое ожидание случайного процесса на выходе равно единице. Но в целом частота вращения изменяется от минимального значения, равного 0,9978, до максимального значения, равного 1,002, от номинальной частоты вращения.
Дисперсия случайного сигнала уменьшилась с 0,1 до 4,5638 10-7, то есть в 219115 раз. Таким образом, САРЧ служит своеобразным фильтром для случайного сигнала, проходящего через нее.
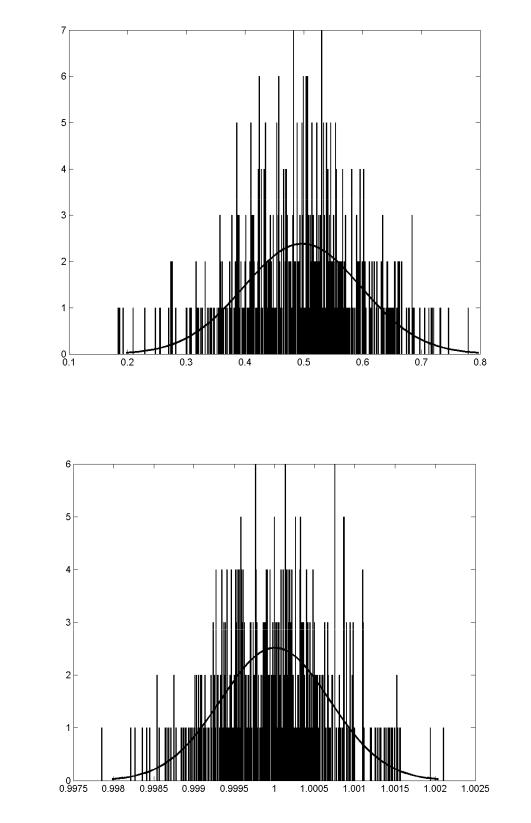
Для получения плотности вероятности распределения случайного сиг-
нала служит команда histfit(Variable name, N), где операнд Variable name
указывает на имя переменной, а операнд N устанавливает количество интервалов гистограммы.
Для нашего примера значения этих операндов:
1)для входного сигнала – имя переменной In, количество интервалов гистограммы, равное времени моделирования, деленному на шаг (500). Команда выглядит следующим образом: histfit(In,500) (рис.7.7);
2)для выходного сигнала – имя переменной Out1 (без переходного процесса по управлению), количество интервалов гистограммы, равное времени моделирования, деленному на шаг, за вычетом отбрасываемых
123
точек (470). Команда выглядит следующим образом: histfit(Out1,470) (рис. 7.8).
Рис.7.7. Плотность вероятности распределения случайного сигнала на входе в САРЧ
Рис.7.8. Плотность вероятности распределения случайного сигнала на выходе из САРЧ
124
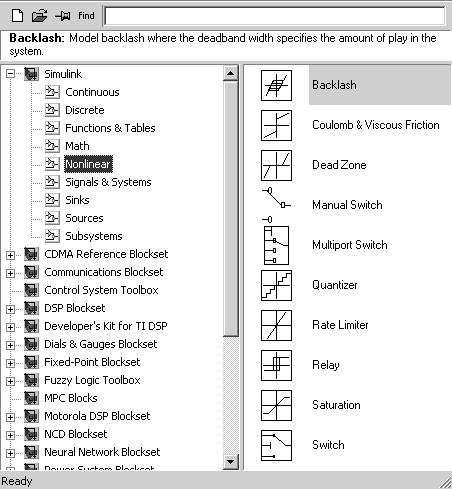
8. НЕЛИНЕЙНЫЕ БЛОКИ ПАКЕТА Simulink
Пакет Simulink предназначен для моделирования любых систем, в том числе и нелинейных динамических систем. Раздел Nonlinear основной библиотеки Simulink, посвященный нелинейным компонентам, содержит наиболее распространенные нелинейные блоки (рис. 8.1), которые в теории автоматического управления имеют название «типовые нелинейные звенья».
Рис.8.1. Раздел нелинейных блоков библиотеки Simulink
Среди нелинейных блоков следует отметить блоки с типичными нелинейностями, например блоки с характеристиками в виде типовых математических функций, компоненты идеальных и неидеальных ограничителей и т.д. Представлены также такие компоненты, как квантователи сигналов, блоки нелинейности, моделирующие нелинейные петли гистерезиса, и ключи-переключатели с разными состояниями, зависящими от управляющих сигналов.
125