Материал: 1244
Требования |
|
|
|
|
|
к качеству |
|
|
|
, |
|
→Dv, Dv+1→K→ 1 |
→ c |
→ 2 |
→ 3 |
||
и типовая ЛПЧХ |
|
|
|
|
|
где Dv – коэффициент ошибки по v-й разновидности.
Если определяющими требованиями являются максимально допустимое значение ошибки при максимальной скорости и ускорении воздействия и допустимая величина показателя колебательности, то можно руководствоваться следующей методикой [2]:
|
Требования |
|
|
|
|
|
|
|
|
→ c |
|
||
|
|
|
|
|||
|
к качеству |
→ р, |
Lp→ б |
|
||
|
→ 2 |
|
||||
|
и типовая ЛПЧХ |
|
|
|
, |
|
|
|
|
→ ТΣ → 3 |
|||
, Lp – координаты контрольной рабочей точки, определяемой по ус- |
||||||
где р |
||||||
ловиям точности; б - базовая частота.
Помимо формул, устанавливающих связь между параметрами типовых ЛПЧХ, в справочниках приводятся удобные для инженерных расчетов номограммы, позволяющие не только определять параметры типовых ЛПЧХ по заданным показателям качества, но и минимизировать некоторые из этих показателей (показатель колебательности, среднеквадратичную ошибку и др.) [2].
Входными параметрами является отношение
|
|
|
0 |
m(mn,mn2) |
(3) |
|
||
б |
|
|
для разных типов ЛПЧХ.
При формировании желаемой ЛПЧХ импульсных систем должны выполняться некоторые специфические ограничения, невыполнение которых вызывает нарушение требований к грубости системы и вызывает ее неустойчивость, т.е. приводит к неустойчивым линейным программам ПВМ, реализующим получающее дискретное корректирующее устройство. Для исключения этого необходимо, чтобы передаточная функция Кж(jω*) содержала в качестве нулей и полюсов все те нули и полюса передаточной функции Кф(jω*), которые лежат в правой полуплоскости. Кроме того, необходимо, чтобы в получающейся дробно-рациональной функции КДКУ(jω*) степень числителя не превышала степени зна-
14
менателя. Это достигается, если наклон ЛПЧХ Кж(jω*) в области верхних частот не меньше, чем наклон Кф(jω*) [2].
4.3. Расчет дискретного корректирующего устройства
Для расчета дискретного корректирующего устройства необходимо графически определить его ЛПЧХ, записать по ней его псевдочастотную характеристику и перейти к импульсной передаточной функции. Далее следует оценить грубость скорректированной системы и устойчивость программы дискретного корректора. Схема действий при синтезе последовательного дискретного корректирующего устройства имеет вид [2]
|
|
|
|
|
|
|
|
|
|
Lф |
|
|
|
|
|
|
|||
ж |
|
|
|
LДКУ |
Lж |
Lф |
|||
|
|
|
|
|
|
|
|
||
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KДКУ z . |
(4) |
|
|
|
|
|
KДКУ j |
|||||
Последний переход осуществляется с помощью подстановки
[2]
|
|
2 |
|
z 1 |
|
|
|
j |
|
|
|
|
|
. |
(5) |
|
z 1 |
||||||
|
|
T |
|
|
|||
При необходимости коррекции системы дискретной обратной связью студент должен самостоятельно решить вопрос о разбиении передаточной функции Кф(р) на К1(р) и К2(р) в соответствии с рис. 1, б. На рис. 1 идеальное фиксирующее устройство с передаточной функцией
KИФУ p |
1 e pT |
(6) |
|
p |
|||
|
|
отнесено к непрерывной части системы [2].
15
4.4. Определение алгоритма работы ЦВМ в роли дискретного корректора. Реализация дискретного корректирующего устройства в виде импульсной RC-цепи
Реализация дискретного корректирующего устройства широко осуществляется с помощью ПВМ или импульсных RC-цепей. В первом случае задача сводится к определению программы вычисления очередного импульса дискретного корректора, которая находится непосредственно по импульсной передаточной функции КДКУ(z) путем перехода к разностному уравнению. Известным методом реализации импульсной передаточной функции с помощью ПВМ является прямое последовательное или параллельное программирование. Наиболее просто дискретная коррекция реализуется с помощью последовательной импульсной RC-цепи. Требуемая импульсная передаточная функция дискретного корректора должна быть равна [2]
K |
к.у |
p |
|
||
KДКУ z 1 z 1 Z |
|
|
, |
(7) |
|
|
p |
||||
|
|
|
|||
откуда
Kк.у p pZ 1 |
K |
ДКУ |
z |
(8) |
|||
|
|
|
. |
||||
1 z 1 |
|||||||
|
|
|
|
||||
На основании последнего выражения подбирается RC-цепь и рассчитываются ее параметры [2].
4.5. Построение переходной функции в скорректированной системе
Переходный процесс в скорректированной импульсной системе может быть рассчитан с помощью обратного Z- преобразования. При малых периодах дискретности удобным является частотный метод расчета переходных процессов [2].
Последовательность действий в этом случае представлена зависимостью (9). Далее используется метод трапецеидальных частотных характеристик, так же как в теории непрерывных систем
[2].
16

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Lск |
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
Р |
|
|
p |
. |
(9) |
||||||||||||
|
|
|
2arctg |
|
|||||||||||||
|
|
||||||||||||||||
|
Номогр. |
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
||
ск |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Рекомендуемая методика анализа показана на примере.
5. ПРИМЕР ВЫПОЛНЕНИЯ КУРСОВОГО ПРОЕКТА
Рассчитать методом ЛПЧХ дискретное корректирующее устройство импульсной САУ по следующим исходным данным.
Передаточная функция функционально необходимых элементов системы [2]
Кф р |
10 1 |
0,25р |
. |
(10) |
|
р 1 0,5 |
р 1 0,08р |
||||
|
|
|
При максимальной скорости воздействия хmax=20 м/с ошибка по первой разности z1≤4 м, при максимальном ускорении хmax= 10 м/с2. Ошибка по второй разности z2≤5 м. Запас устойчивости по
|
|
|
|
|
|
|
|
фазе |
с |
|
. Период следования импульсов Т=0,2 с, типовая |
||||
4 |
|||||||
желаемая ЛПЧХ 2/1 [2]. |
|
|
|
|
|||
|
Решение. |
|
|
|
|
|
|
|
1. Построим ЛПЧХ функционально неизменяемой части сис- |
||||||
темы. Слева от частоты |
|
2/T 10 c |
1 |
эта характеристика сов- |
|||
0 |
|
||||||
падает с логарифмической амплитудной характеристикой (ЛАХ) непрерывной части системы, определяемой передаточной функцией
Кф р 10 1 0,25р , (11)
н |
р 1 0,5 |
р |
|
истроится обычными методами [2].
Вобласти верхних частот, учитывая, что l=k, до частоты
(0,5T Т ) 1 (0,1 0,08) 1 50 c 1 ЛПЧХ имеет наклон 1, а после
17
частоты 50 с-1 – нулевой наклон. ЛПЧХ функционально неизме- |
||||||
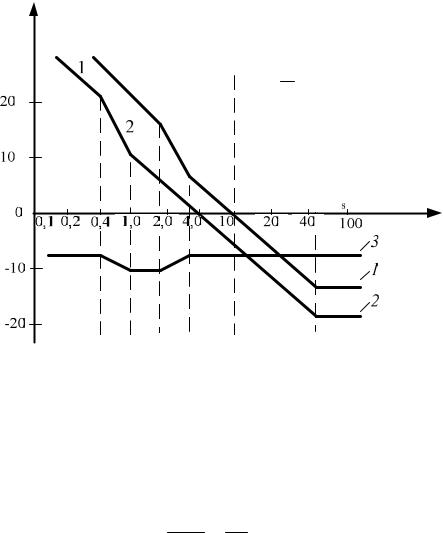
няемой части системы показана на рис. 8 (кривая 1) [2]. |
|
|||||
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
0 |
Т |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
1 |
|
|
c |
|
|
|
|
|
|
|
|
|
|
Рис. 8. Синтез последовательного дискретного корректирующего |
||||||
|
|
|
устройства |
|
||
2. Рассчитаем параметры типовой желаемой ЛПЧХ 2/1. Оп- |
||||||
ределяем коэффициенты ошибок по первой и второй разностям |
||||||
[2]: |
|
|
|
|
|
|
|
D |
z1 |
|
4 0,2с; |
(12) |
|
|
1 |
|
|
20 |
|
|
|
|
xmax |
|
|
||
D |
z2 |
|
|
5 |
0,5с2. |
(13) |
|
|
|||||
2 |
|
10 |
|
|
||
|
xmax |
|
|
|
||
Коэффициент преобразования [2]
K |
1 |
5с=14дБ. |
(14) |
|
D1
Первую сопрягаемую частоту 1 определяем из соотношения
[2]
18