Материал: 1244
Типичным устройством, которое осуществляет квантование по уровню, является электромагнитное реле (рис. 4), содержащее электромагнит K и переключаемые электромагнитом электрические контакты S. Входом для реле является напряжение U на обмотке электромагнита, а выходом – состояние контактов S. При непрерывном изменении напряжения на электромагните состояние контактов (замкнуты или разомкнуты) будет изменяться только при переходе величины напряжения через уровень срабатывания Uср реле (уровень срабатывания – значение тока, при котором электромагнит срабатывает и переключает контакты реле) [1,3].
Рис. 4. Квантование сигнала электромагнитным реле
Таким образом, для реле квантованный сигнал может принимать только два уровня: контакты S разомкнуты или контакты S замкнуты. Состояние контактов удобно описывать как логическую величину, принимающую значение 1 при замкнутых контактах, и значение 0 при разомкнутых контактах [1,3].
Характеристика преобразования входного напряжения U в состояние контактов S для реле показана на рис. 4. Это ступенчатая характеристика, изменение уровня которой происходит при входном напряжении U=Uср. Характеристика подобного вида получила название релейная характеристика. Релейная характеристика является одним из случаев нелинейной характеристики [1].
Квантование по времени и по уровню. В этом случае оба пре-
дыдущих способа комбинируются, поэтому способ квантования называют также комбинированным. При комбинированном квантовании квантованному сигналу в наперед заданные моменты времени присваивается значение ближайшего фиксированного уровня, которого достиг квантуемый сигнал. Это значение сохраняется до следующего момента квантования [1,3].
9
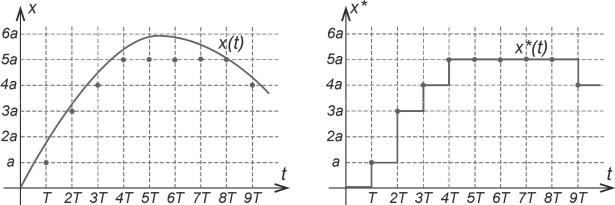
Графики квантуемого и квантованного сигналов показаны на рис. 5. На графике квантуемого сигнала x(t) точками показаны значения достигнутых уровней, ближайших к значениям квантуемого сигнала в момент квантования. Изменения квантованного сигнала происходят в моменты квантования, кратные периоду T квантования по времени. Таким образом, квантованный сигнал будет характеризоваться периодом квантования и значением ближайшего фиксированного уровня [1,3].
Рис. 5. Комбинированное квантование сигнала
Типичными примерами устройства, в котором имеет место комбинированное квантование, являются аналого-цифровой преобразователь (АЦП) и цифровой прибор, построенный с использованием аналого-цифрового преобразователя. Выходная информация таких устройств обновляется с периодом, определяемым длительностью преобразования входного сигнала в цифровой код (квантование по времени), а выходная информация представляется с конечной точностью, определяемой разрешающей способностью квантования или разрядностью кода для представления квантованного сигнала [1,3].
3.2. Классификация дискретных систем
Отличительным признаком дискретной системы автоматического управления является квантование сигналов в такой системе. На свойства системы управления влияют не только наличие квантования сигналов, но и используемый способ квантования. Математическая модель системы автоматического управления также будет зависеть от используемого в системе способа квантования
10

сигналов. Поэтому дискретные системы автоматического управления классифицируются по признаку способ квантования сигнала
[1,3].
Рис. 6. Классификация дискретных систем
Классификационная схема для дискретных систем показана на рис. 6. Системы с квантованием сигнала по времени являются импульсными системами. Для таких систем используются специфические математические модели и разработаны соответствующие методы теории автоматического управления [1,3].
Системы с квантованием сигнала по уровню являются релейными системами. Поскольку релейная характеристика преобразования сигнала является частным случаем нелинейной характеристики, то к релейным системам применима теория нелинейных систем и они рассматриваются как частный случай нелинейных систем [1,3].
Дискретные системы с комбинированным квантованием являются цифровыми системами. При большом числе уровней квантования, что характерно для цифровых систем, свойства системы в первую очередь определяются квантованием сигнала по времени. Поэтому по используемым математическим моделям при их описании и по методам исследования цифровые системы близки к импульсным системам [1,3].
11
4. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ КУРСОВОГО ПРОЕКТА
4.1. Расчет и построение ЛПЧХ разомкнутой импульсной системы, состоящей из функционально необходимых элементов, и оценка ее устойчивости и качества
При построении ЛПЧХ импульсных систем приближенным методом следует считать, что слева от частоты 0 2/T они совпадают с частотными характеристиками непрерывной части, а в
области высоких частот (справа от |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
0 2/T ) псевдочастотная ха- |
||||||||||||||||||||
рактеристика Квч(jω*) определяется выражениями [2]: |
|
|||||||||||||||||||
для l=k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
КЭ 1 |
j |
|
|
|
Т |
|
|
|
||||
|
|
T |
|
2 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
Квч j |
1 j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
(1) |
||
2 |
|
j |
1 j |
T |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
для l – k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кэ 1 jT |
|
|
|||||||||||||
Квч |
j |
1 j |
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
(2) |
|||
2 |
|
|
j |
|
|
2 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где l и k – количество звеньев знаменателя и числителя, сопрягающие частоты которых расположены слева от 0 2/T ; ТΣ – суммарная постоянная времени высокочастотных звеньев;
|
k |
|
|
|
К П j |
||
Кэ |
j 1 |
|
– эквивалентный коэффициент преобразования. |
l |
|
||
|
ПT |
||
|
i 1 |
i |
|
4.2. Расчет параметров и построение заданной типовой ЛПЧХ по заданным требованиям к качеству системы
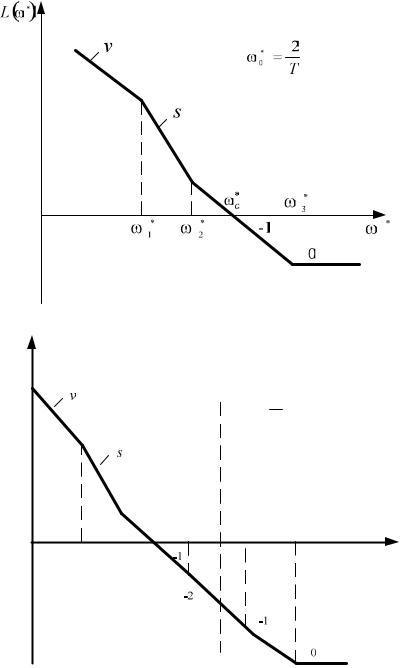
Типовые ЛПЧХ представлены на рис. 7, а, б [2].
12
|
|
Кф(р)=К1(р)К2(р). |
|||
а) |
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
0 |
Т |
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
3 |
4 |
5 |
|
|
|
|
|
|
|
1 |
2 |
|
|
|
Рис. 7. Типовые желаемые ЛПЧХ импульсных систем |
|||||
В зависимости от задания подход к расчету параметров типовых ЛПЧХ может быть различным. Так, если заданы значения конечных разностей воздействия и допустимые значения соответствующих ошибок установившегося режима, а также допустимый запас устойчивости по фазе, то последовательность действий может быть следующая [2]:
13