Материал: 1244
2. СОДЕРЖАНИЕ КУРСОВОГО ПРОЕКТА
Задание:
1.Расчет и построение логарифмической псевдочастотной характеристики (ЛПЧХ) разомкнутой импульсной системы, состоящей из функционально необходимых элементов, и оценка ее устойчивости и качества.
2.Расчет параметров и построение заданной типовой желаемой ЛПЧХ по заданным требованиям к качеству системы.
3.Расчет дискретного корректирующего устройства.
4.Определение алгоритма работы цифровой вычислительной машины (ЦВМ) в роли дискретного корректора. Реализация дискретного корректирующего устройства в виде импульсной RC- цепи.
5.Построение переходной функции в скорректированной системе.
Перечень необходимого графического материала:
1.Функциональная схема скорректированной системы и принципиальная схема дискретного корректирующего устройства при его реализации импульсным RC-фильтром либо структурная схема реализации алгоритма на ЦВМ.
2.Логарифмические псевдочастотные характеристики функционально необходимой и требуемой части системы, а также дискретного корректирующего устройства.
3.Переходная функция импульсной системы.
4.Прочие вспомогательные и расчетные графики и рисунки. Примерное содержание
пояснительной записки определяется заданием, дополненным введением и выводами. Пояснительная записка должна содержать весь необходимый расчетный и графический материал.
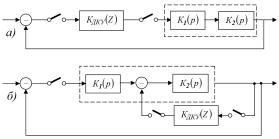
Структурные схемы систем с последовательной дискретной коррекцией и дискретной коррекцией в цепи обратной связи
Рис. 1. Структурные схемы импульсных систем с последовательной дискретной коррекцией (а) и дискретной коррекцией в цепи ОС (б)
5
(ОС) представлены соответственно на рис. 1, а и б. Исходные данные приведены в таблице.
6

|
|
|
|
|
Воздействия |
|
|
|
|
|
Требования к качеству |
|
|
|
||||||||
|
Вариант |
|
медленно меняющ. |
гармонич. |
Помеха S м |
Типовая ЛПЧХs/v |
м |
Составляющая ошибок |
град |
|
|
|
(ω рад |
|||||||||
|
|
м/с |
м/с |
м/с |
град/с |
град/с |
м |
м |
|
м2 |
|
|
|
|||||||||
|
|
|
|
х(t) |
|
β(t) |
,ω)( с |
|
|
|
|
|
|
|
|
|
|
|
|
|
), |
|
|
|
Кф(р) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
T,c |
* с |
||
|
|
|
|
|
|
|
|
z , |
z , |
z , |
|
n |
|
|
|
|
|
|
||||
|
|
|
max, |
max, |
f 2 |
|
|
zf , |
|
max, |
|
|
|
|
||||||||
|
|
|
хmax, |
xmax, |
xmax, |
|
|
1 |
2 |
3 |
|
|
|
|
|
|
|
|||||
|
1 |
|
50 |
24 |
– |
– |
– |
– |
2/1 |
10 |
4 |
– |
|
– |
|
|
– |
|
– |
0,04 |
π/4 |
|
|
2 |
|
40 |
20 |
– |
– |
– |
– |
2/1 |
8 |
5 |
– |
|
– |
|
|
– |
|
– |
0,08 |
π/4 |
|
|
3 |
|
– |
– |
– |
12 |
8 |
– |
2/1 |
– |
– |
– |
|
– |
|
0,2 |
|
1,4 |
0,06 |
– |
||
|
4 |
|
– |
– |
– |
20 |
10 |
– |
2/1 |
– |
– |
– |
|
– |
|
0,1 |
|
1,5 |
0,05 |
– |
||
|
5 |
|
– |
40 |
10 |
– |
– |
– |
3/2 |
– |
5 |
5 |
|
– |
|
|
– |
|
– |
0,2 |
π/4 |
|
|
6 |
|
– |
30 |
20 |
– |
– |
– |
3/2 |
– |
6 |
5 |
|
– |
|
|
– |
|
– |
0,1 |
π/4 |
|
|
7 |
|
– |
– |
– |
10 |
8 |
– |
3/2 |
– |
– |
– |
|
– |
|
0,2 |
|
1,5 |
0,1 |
– |
||
|
8 |
|
– |
– |
– |
16 |
4 |
– |
3/2 |
– |
– |
– |
|
– |
|
0,1 |
|
1,6 |
0,05 |
– |
||
|
9 |
|
– |
24 |
16 |
– |
– |
– |
3/2 |
– |
6 |
4 |
|
– |
|
|
– |
|
– |
0,04 |
π/3 |
|
|
10 |
|
– |
18 |
12 |
– |
– |
– |
3/2 |
– |
4 |
3 |
|
– |
|
|
– |
|
– |
0,08 |
π/3 |
|
6 |
11 |
|
– |
– |
– |
0,5 sin |
0,02t |
10 |
2/1 |
– |
– |
– |
min |
|
20 |
|
1,2 |
0,05 |
– |
|||
12 |
|
– |
– |
– |
1,2 sin |
0,1t |
0,5 |
2/1 |
– |
– |
– |
2,5 |
|
min |
|
1,4 |
0,1 |
– |
||||
|
|
|
|
|||||||||||||||||||
|
13 |
|
– |
– |
– |
1,0 sin |
0,05t |
4 |
2/1 |
– |
– |
– |
10 |
|
|
1 |
|
min |
0,06 |
– |
||
|
14 |
|
30 |
20 |
– |
– |
– |
– |
2/1 |
6 |
4 |
– |
|
– |
|
|
– |
|
– |
0,5 |
π/4 |
|
|
15 |
|
18 |
10 |
– |
– |
– |
– |
3/1 |
3 |
2 |
– |
|
– |
|
|
– |
|
– |
0,4 |
π/4 |
|
|
16 |
|
– |
– |
– |
10 |
6 |
– |
2/1 |
– |
– |
– |
|
– |
|
0,3 |
|
1,5 |
0,3 |
– |
||
|
17 |
|
– |
– |
– |
15 |
9 |
– |
2/1 |
– |
– |
– |
|
– |
|
0,2 |
|
1,4 |
0,2 |
– |
||
|
18 |
|
– |
16 |
12 |
– |
– |
– |
3/2 |
– |
4 |
3 |
|
– |
|
|
– |
|
– |
0,5 |
π/4 |
|
|
19 |
|
– |
25 |
15 |
– |
– |
– |
3/2 |
– |
5 |
3 |
|
– |
|
|
– |
|
– |
0,4 |
π/4 |
|
|
20 |
|
– |
– |
– |
12 |
10 |
– |
3/2 |
– |
– |
– |
|
– |
|
0,1 |
|
1,6 |
0,3 |
– |
||
|
21 |
|
– |
– |
– |
20 |
16 |
– |
3/2 |
– |
– |
– |
|
– |
|
0,5 |
|
1,4 |
0,2 |
– |
||
|
22 |
|
– |
12 |
10 |
– |
– |
– |
3/2 |
– |
3 |
2 |
|
– |
|
|
– |
|
– |
0,6 |
π/3 |
|
|
23 |
|
– |
20 |
16 |
– |
– |
– |
3/2 |
– |
5 |
4 |
|
– |
|
|
– |
|
– |
0,4 |
π/3 |
|
|
24 |
|
– |
– |
– |
2,5 sin |
0,05t |
20 |
2/1 |
– |
– |
– |
min |
|
10 |
|
1,1 |
0,5 |
– |
|||
|
25 |
|
– |
– |
– |
10 sin |
0,02t |
2,5 |
2/1 |
– |
– |
– |
16 |
|
min |
|
1,5 |
0,4 |
– |
|||
|
26 |
|
– |
– |
– |
0,5 sin |
4t |
10 |
2/1 |
– |
– |
– |
25 |
|
|
3 |
|
min |
0,3 |
– |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. ТЕОРЕТИЧЕСКАЯ СПРАВКА
3.1. Понятие «дискретная система»
Среди систем автоматического управления распространены системы, в которых сигналы могут быть описаны дискретными функциями времени [1,3].
Дискретные системы – это системы, содержащие элементы, которые преобразуют непрерывный сигнал в дискретный. В дискретных системах сигналы описываются дискретными функциями времени.
Дискретность сигналов управления будет присутствовать, например, в случае применения для управления объектом ЭВМ. В принципе системы, в которых используются цифровые преобразователи сигналов или ЭВМ, будут характеризоваться присутствием дискретных сигналов управления или информации [1,3].
Квантование – процесс преобразования непрерывного сигнала в дискретный. В зависимости от используемого вида квантования системы можно классифицировать:
импульсные системы, использующие квантование по вре-
мени;
релейные системы, использующие квантование по уровню;
цифровые системы, использующие квантование по уровню
ипо времени (комбинированное квантование).
Дискретные сигналы создаются на основе непрерывных сигналов. Процесс преобразования непрерывного сигнала в дискретный называется квантование сигнала. Исходный непрерывный сигнал называется квантуемый сигнал, сигнал, получаемый в результате квантования, называется квантованный сигнал. Существуют разные способы квантования непрерывного сигнала [1].
Квантование по времени. Квантованный сигнал содержит отдельные значения (дискреты) квантуемого сигнала, которые выделяются в фиксированные моменты времени.
Процесс квантования по времени показан на рис. 2, где x(t) – квантуемый сигнал, x*(t) – квантованный сигнал [1].
Значения сигнала выделяются через равные промежутки времени T, где T – период (интервал) квантования. Следовательно, квантованный сигнал будет состоять из последовательности дискрет квантуемого сигнала, выделенных в моменты времени, крат-
7
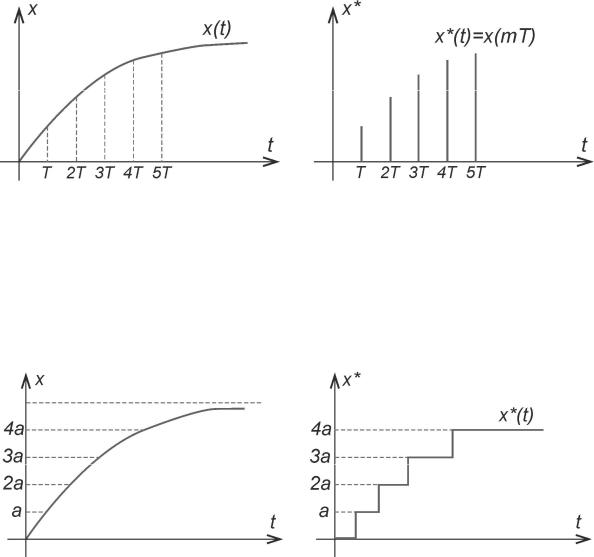
ные периоду квантования. Квантованный сигнал при квантовании по времени описывается решетчатой функцией времени квантуемого сигнала [1]
x*(t) x(mT), |
(1) |
где m – целочисленный аргумент времени, m=1,2,3…
Рис. 2. Квантование сигнала по времени
Квантование по уровню. В моменты достижения квантуемым сигналом некоторых фиксированных уровней квантованному сигналу присваивается значение достигнутого уровня, и это значение квантованного сигнала сохраняется до момента достижения квантуемым сигналом следующего уровня (рис. 2) [1].
Рис. 3. Квантование сигнала по уровню
На рис. 3 для квантуемого сигнала x(t) определены уровни квантования с интервалом (шагом) a. Значения квантованного сигнала x*(t) изменяются в момент достижения квантуемым сигналом очередного уровня. В результате квантованный сигнал представляет собой ступенчатую функцию времени [1].
8