Материал: 111111111
Тахогенератор представляет собой измерительную электрическую микромашину переменного или постоянного тока, которая монтируется на вал оборудования, и преобразует текущее значение частоты вращения вала в электрический сигнал, определенный параметр которого несет информацию о частоте вращения.
Таким параметром может выступать величина генерируемой ЭДС или значение частоты сигнала. Выходной сигнал с тахогенератора может подаваться на средство визуального отображения (например на дисплей) или на устройство автоматического управления частотой вращения вала, на котором работает данный тахогенератор.
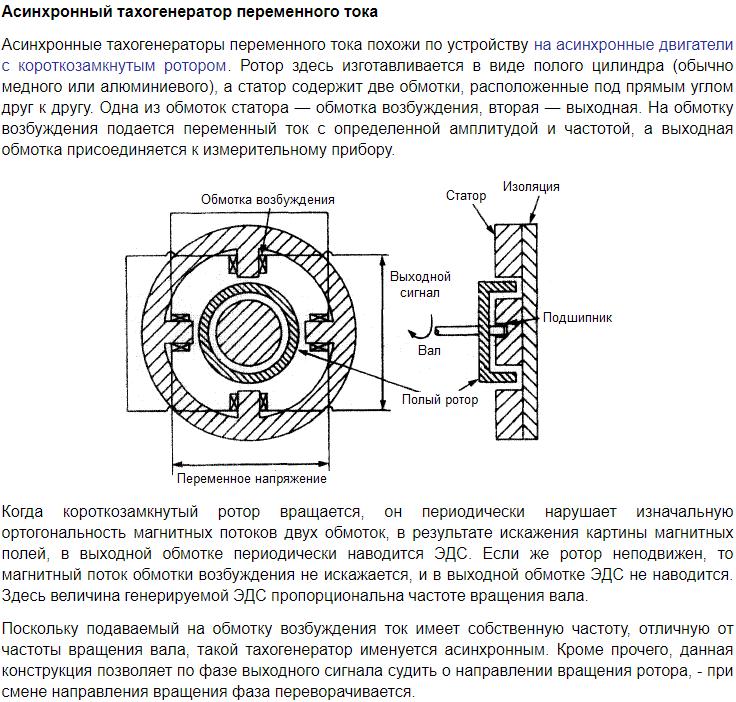
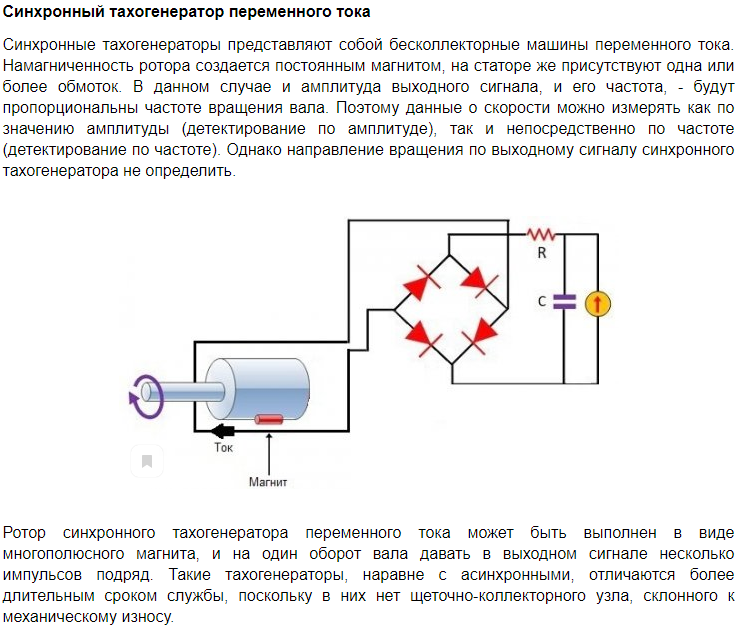
Тахогенераторы бывают нескольких типов, в зависимости от вида сигнала, генерируемого на выходе: с сигналом переменного напряжения или тока (асинхронные или синхронные тахогенераторы), либо с сигналом постоянного тока.
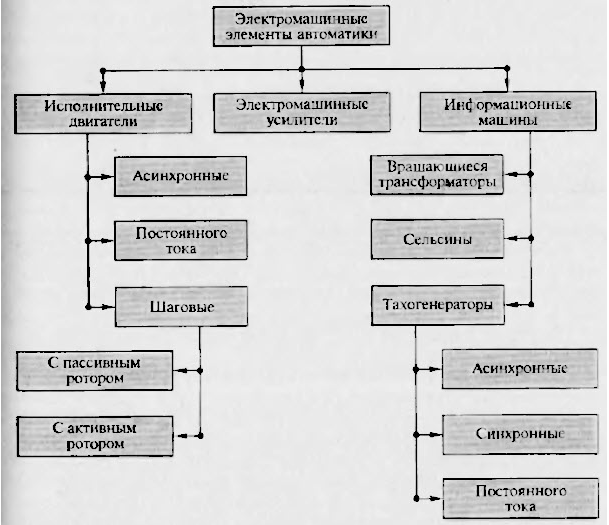
36 Электромашинные элементы автоматики. Классификация.
класс технических средств автоматики, в основе работы которых лежит электромеханическое преобразование энергии и сигналов.
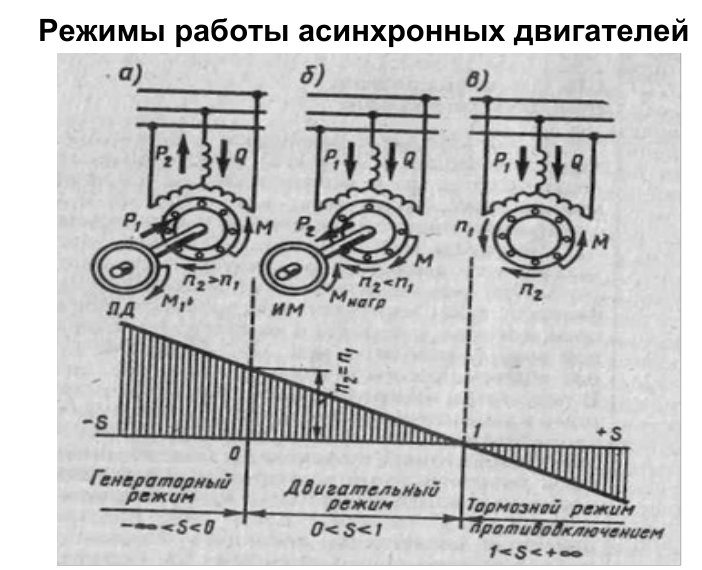
37 Устройство асинхронного двигателя. Режимы работы асинхронных двигателей.
-
Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу.
-
Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка). Второй вариант состоит из трехфазной обмотки, чаще всего соединенной «звездой».
-
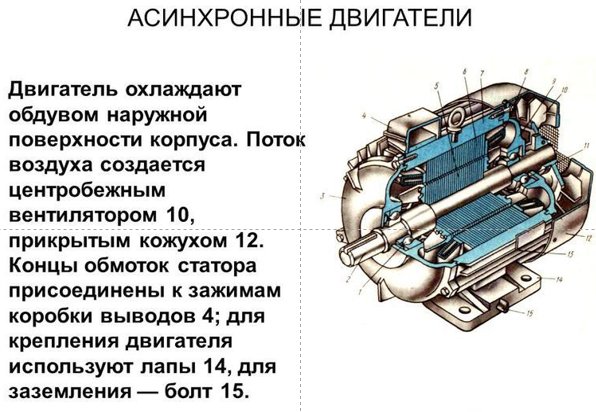
Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов - обеспечивающие вращение, охлаждение и защиту механизма.

38 Принцип действия АД. Понятие скольжения.
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска. Диск с небольшим отставанием начнет вращаться вслед за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), движущиеся по замкнутому кругу. По сути они являются токами короткого замыкания, разогревающими металл. В диске «зарождается» собственное магнитное поле, в дальнейшем взаимодействующее с полем магнита.
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
-
При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
-
В накоротко замкнутом роторе возникает переменный ток.
-
Два магнитных поля (статора и ротора) создают крутящий момент.
-
Крутящийся ротор пытается «догнать» поле статора.
-
В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю.
-
Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
n – частота вращения магнитного поля статора об/мин
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает
максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
будет не лишним посмотреть тут
https://studopedia.ru/20_7779_lektsiya--ustroystvo-i-printsip-raboti-asinhronnogo-dvigatelya.html
39 Конструкция, принцип действия АД с короткозамкнутым и фазным ротором.

Асинхронный двигатель с короткозамкнутым ротором (рис. 249 и 250) состоит из следующих основных частей: статор с трехфазной обмоткой, ротор с короткозамкнутой обмоткой и остов. Обмотка ротора выполнена бесконтактной (она не соединена ни с какой внешней цепью), что определяет высокую надежность такого двигателя.
На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Собранный сердечник статора укрепляют в чугунном корпусе 3 двигателя. Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Устройство статора асинхронного двигателя с фазным ротором и его обмотка не отличаются от устройства статора двигателя с короткозамкнутым ротором. Различие между этими электродвигателями заключается в устройстве ротора.
Фазный ротор имеет три фазные обмотки, соединенные между собой звездой (реже треугольником). Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами. Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек. Щетки, скользящие по поверхности колец ротора, все время имеют с ними хороший электрический контакт и соединены, таким образом, с обмотками ротора. Щетки соединены с трехфазным реостатом.
Принцип действия При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
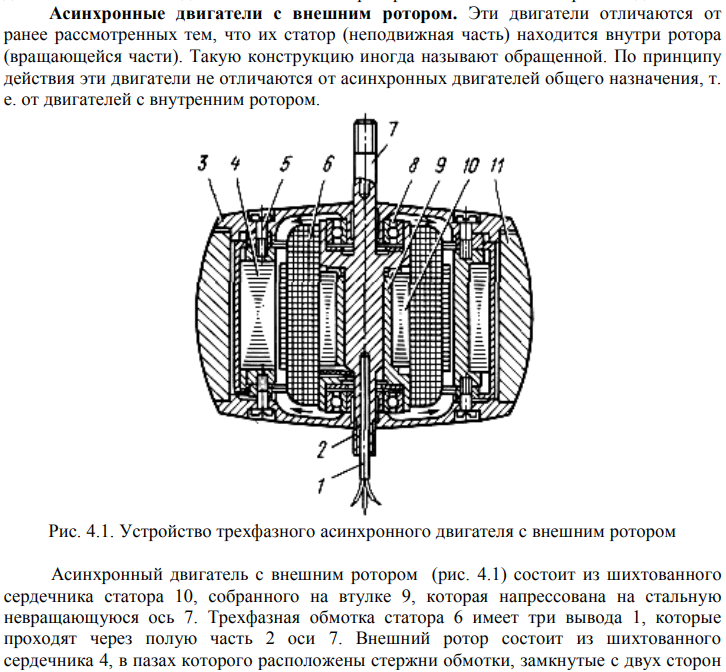
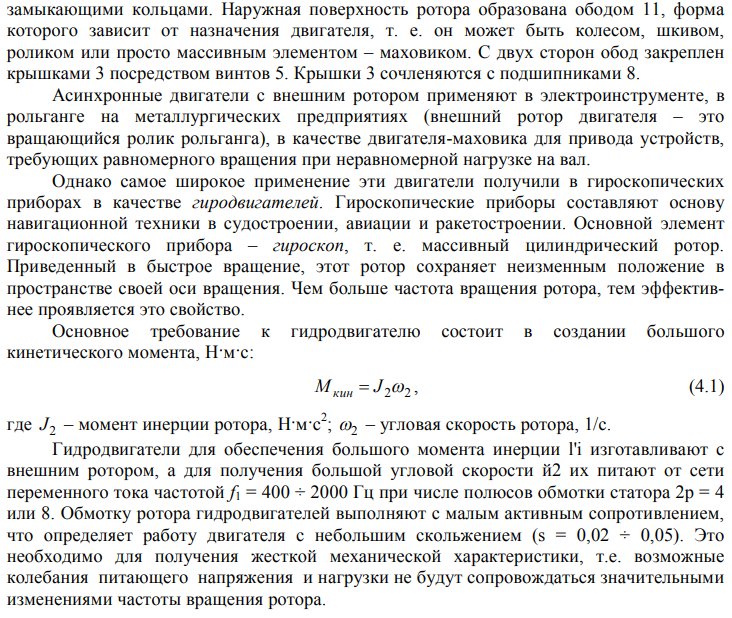
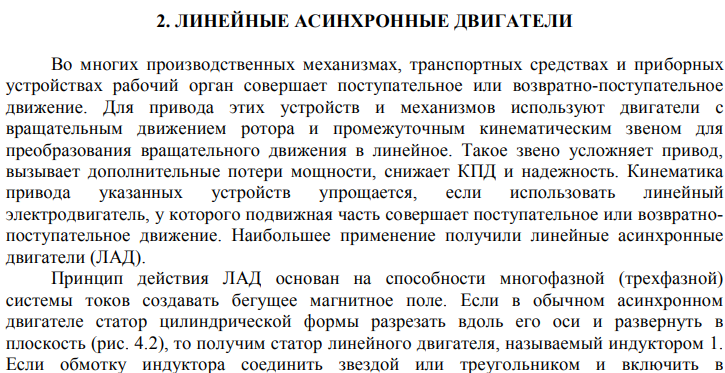
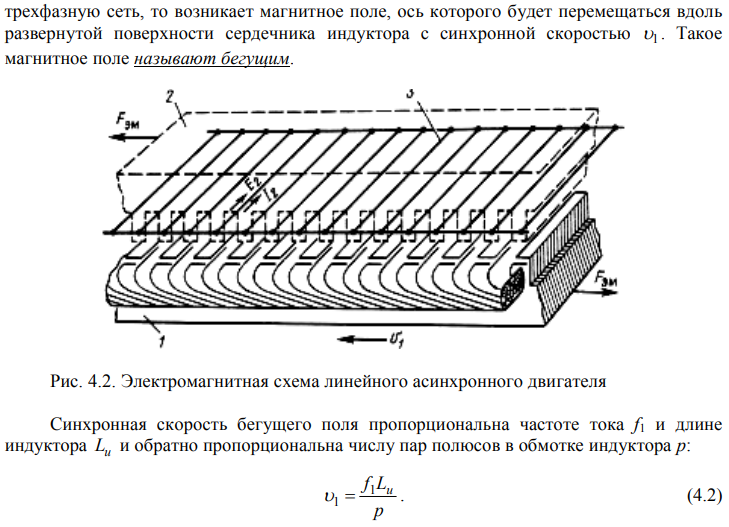
40 Асинхронные двигатели с внешним ротором. Линейные асинхронные двигатели.
41 Программируемые логические контроллеры: понятие, особенности.
Программируемый контроллер — специальная разновидность электронной вычислительной машины. Чаще всего ПЛК используют для автоматизации технологических процессов. В качестве основного режима работы ПЛК выступает его длительное автономное использование, зачастую в неблагоприятных условиях окружающей среды, без серьёзного обслуживания и практически без вмешательства человека.
Иногда на ПЛК строятся системы числового программного управления станков.
ПЛК — устройства, предназначенные для работы в системах реального времени.
ПЛК имеют ряд особенностей, отличающих их от прочих электронных приборов, применяемых в промышленности:
-
в отличие от микроконтроллера (однокристального компьютера) — микросхемы, предназначенной для управления электронными устройствами — ПЛК являются самостоятельным устройством, а не отдельной микросхемой.
-
в отличие от компьютеров, ориентированных на принятие решений и управление оператором, ПЛК ориентированы на работу с машинами через развитый ввод сигналов датчиков и вывод сигналов на исполнительные механизмы;
-
в отличие от встраиваемых систем ПЛК изготавливаются как самостоятельные изделия, отдельные от управляемого при его помощи оборудования.
В системах управления технологическими объектами логические команды, как правило, преобладают над арифметическими операциями над числами с плавающей точкой, что позволяет при сравнительной простоте микроконтроллера (шины шириной 8 или 16 разрядов), получить мощные системы, действующие в режиме реального времени. В современных ПЛК числовые операции в языках их программирования реализуются наравне с логическими. Все языки программирования ПЛК имеют лёгкий доступ к манипулированию битами в машинных словах, в отличие от большинства высокоуровневых языков программирования современных компьютеров.
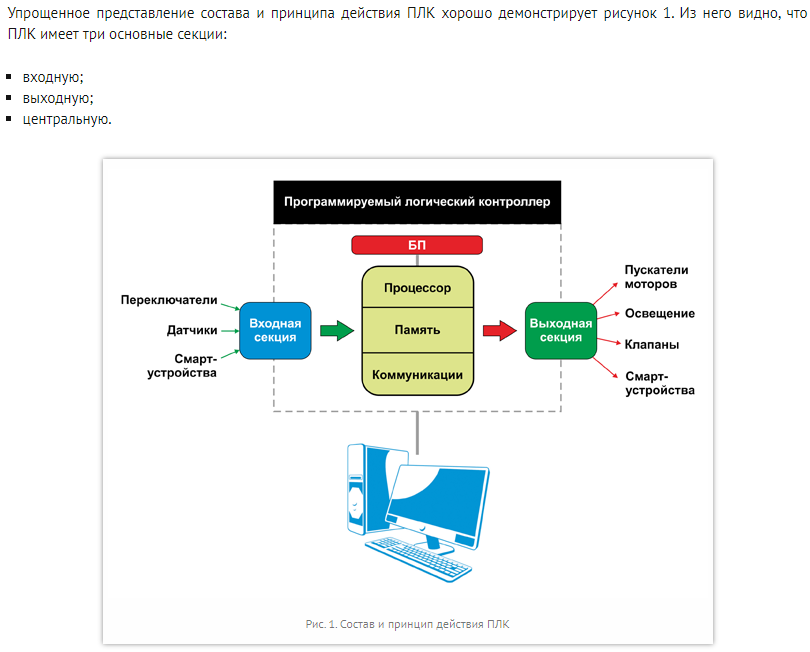
Любой плк Siemens или аналогичный, других производителей, ориентирован на выполнение конкретных действий. Микроконтроллер опрашивает блоки ввода информации, чтобы принять решение, сформировать на выходе готовую команду. Упрощенно схема стандартного элемента включает:
-
вход;
-
центр;
-
выход.
Входные цепи образованы набором датчиков (аналоговых или цифровых), переключающих устройств, смарт-систем. В центральном блоке расположены: процессор, обрабатывающий команды, модуль памяти и средства коммуникации. Выходные цепи отвечают за передачу сигнала на моторы привода, вентиляцию, осветительную арматуру. Туда же допускается подключить управляющее смарт- устройство архитектуры ардуино или подобное. Необходимо также выполнить условие подключения ПЛК к цепям питания. Без них устройство работать не будет. Внешний компьютер через унифицированный интерфейс используется для отладки, программирования контроллера.
Принцип работы плк
По сути, микроконтроллер достаточно близок к реле. Только вместо механических контактов и катушек в нем — электронные цепи. Понять принцип действия будет легко любому инженеру, знакомому со схемами, основами электротехники.
Датчик освещенности на входе подает сигнал в блок обработки данных. В нормальном состоянии процессор не реагирует. Как только сенсор определит падение освещения, изменится его сопротивление, центральный блок задействует цепи питания электроламп.
Для управления ПЛК, его программирования используется бытовой ПК. Несколько отдельных микроконтроллеров образуют каскад с усложненными задачами. Системы «умный дом», автоматика включения двигателя насоса для закачки воды в накопительный бак давно содержат в себе подобные блоки.
Сложные микроконтроллерные устройства обеспечивают охрану, защиту периметра (квартиры), включая связь с полицией (владельцем) через модем, подъем тревоги при проникновении нарушителей, разрушении механизма закрытия двери.
Первый этап работы устройства состоит из экспресс-теста задействованного оборудования. Одновременно идет загрузка операционной среды, управляющих программ. Все как в настольном ПК при старте Windows. Предусмотрена пошаговая отработка команд (отладка), при которой допускается мониторинг, корректировка переменных.
Для простоты восприятия рабочий, шаговый режим ПЛК разбит на типовые циклы. Они повторяются во время функционирования устройства. В каждом цикле, «маршрутной карте» заключаются 3 действия:
Сканирование, обращение к внешним датчикам. Запись значений (состояния) в ячейки памяти.
Анализ действующей программы. Внесение требуемых корректив на основании данных предыдущего шага.
Передача результата вычислений на блоки выхода.
42 Классификация программируемых логических контроллеров.
Для классификации огромного разнообразия существующих в настоящее время контроллеров рассмотрим их существенные различия.
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:
-
нано-ПЛК (менее 16 каналов);
-
микро-ПЛК (более 16, до 100 каналов);
-
средние (более 100, до 500 каналов);
-
большие (более 500 каналов).
По расположению модулей ввода-выводаПЛК бывают:
-
моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
-
модульными - состоящими из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
По конструктивному исполнению и способу крепления контроллеры делятся на:панельные (для монтажа на панель или дверцу шкафа);
-
для монтажа на DIN-рейку внутри шкафа;
-
для крепления на стене;
-
стоечные - для монтажа в стойке;
-
бескорпусные.
По области применения контроллеры делятся на следующие типы:
-
универсальные общепромышленные;
-
для управления роботами;
-
для управления позиционированием и перемещением;
-
коммуникационные;
-
ПИД-контроллеры;
-
специализированные.
По способу программирования контроллеры бывают:
-
программируемые с лицевой панели контроллера;
-
программируемые переносным программатором;
-
программируемые с помощью дисплея, мыши и клавиатуры;
-
программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:
-
на классических алгоритмических языках (C, С#, Visual Basic);
-
на языках МЭК 61131-3.