Материал: 111111111
43 Функционально-конструктивная схема модульного ПЛК.
44 Архитектура модульного ПЛК. Архитектура центрального модуля ПЛК.
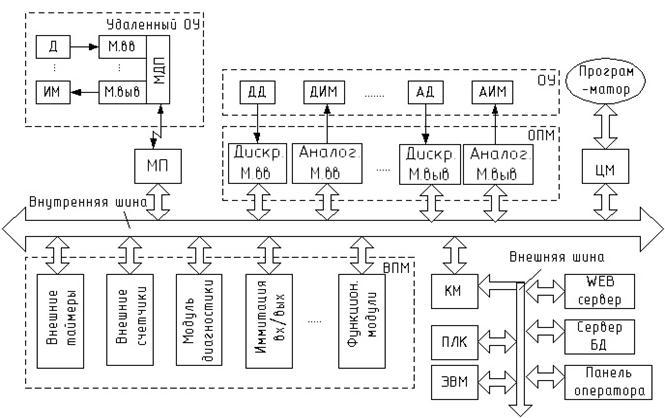
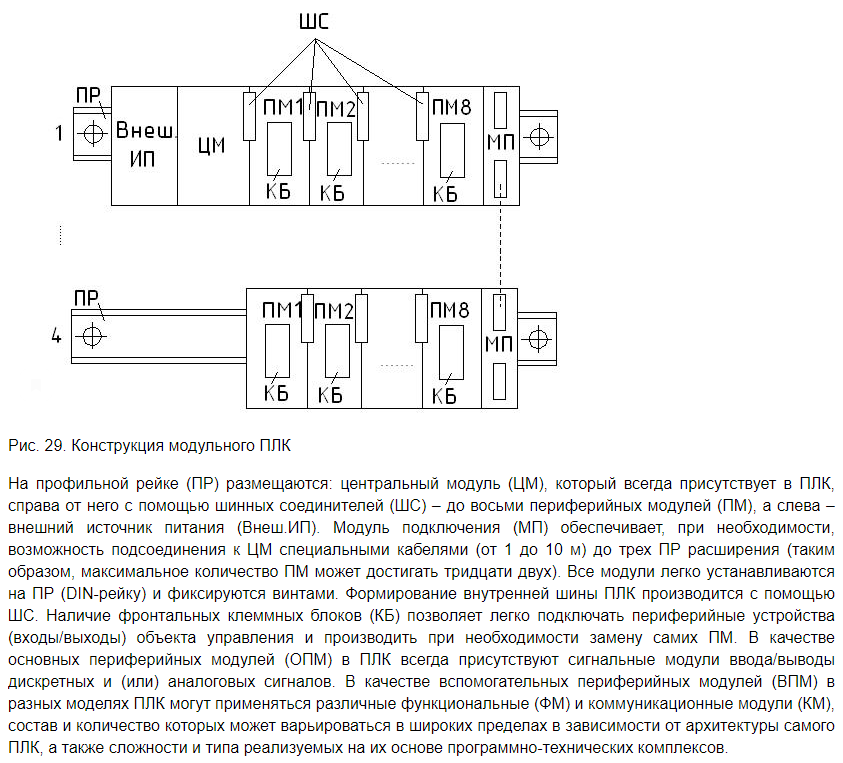
Рис. 30. Архитектура модульного ПЛК
Модули ПЛК объединены внутренней шиной, по которой и передается вся информация между ними. В минимальной конфигурации ПЛК обязательно имеет ЦМ и хотя бы один из ОПМ для связи с ОУ. Для ввода и редактирования управляющей программы, параметрирования и тестирования системы используется программатор, который может быть временно подключен к ЦМ.
Система ввода-вывода ПЛК может включать в свой состав две части. Система локального ввода-вывода образуется ОПМ, установленными непосредственно в монтажные стойки контроллера, и предназначена для получения входных сигналов с дискретных (ДД) и аналоговых датчиков (АД) и выдачи управляющих воздействий на дискретные (ДИМ) и аналоговые исполнительные механизмы (АИМ). Система распределенного ввода-вывода предназначена для управления удаленным ОУ и включает в свой состав модули децентрализованной периферии (МДП) и приборы полевого уровня (Д и ИМ), подключаемые к контроллеру через промышленную сеть и специальный МП.
Вспомогательные периферийные модули (ВПМ) предназначены для аппаратной реализации стандартных часто используемых алгоритмов задержек времени (таймеров), счета, регулирования, управления и призваны разгрузить вычислительные мощности ЦМ. Коммуникационные модули (КМ) используются для связи ПЛК с другими интеллектуальными устройствами ПТК.
Процессорный модуль включает микропроцессор (центральное процессорное устройство), запоминающие устройства, часы реального времени и сторожевой таймер.
Огромное разнообразие задач, возлагаемых на ПЛК, и сильная зависимость цены от мощности контроллера являются причиной большого разнообразия используемых в них микропроцессоров — от простых и дешевых Atmel и Microchip до самых высокопроизводительных микропроцессоров серии Intel Pentium, включая двухъядерные и четырехъядерные.
Рис. 1.2.1. Обобщенная структура контроллера
В ПЛК используются 8-, 16- и 32-разрядные микропроцессоры. Восьмиразрядные микропроцессоры пользуются большим успехом в малопроизводительных ПЛК для несложного алгоритмического управления небольшими технологическими аппаратами, станками, построения межсетевых шлюзов. Их достоинством является высокая надежность, связанная с предельной простотой программного обеспечения. 16- и 32-разрядные микропроцессоры используются в высокопроизводительных контроллерах.
Кроме разрядности, основными характеристиками микропроцессоров в ПЛК являются архитектура, тактовая частота, наличие операций с плавающей точкой, типы поддерживаемых портов ввода- вывода, температурный диапазон работоспособности и потребляемая мощность.
Достаточно часто в контроллерах используют микропроцессоры с RISC-архитектурой (Reduced Instruction Set Computing — компьютеры с сокращенным набором команд). В таких микропроцессорах используется небольшое количество команд одинаковой длины и большое количество регистров. Сокращенный набор команд позволяет строить эффективные компиляторы и конвейер процессора. Используются микропроцессоры и других архитектур.
Тактовая частота характеризует производительность микропроцессоров. Производительность микропроцессоров с одной и той же архитектурой пропорциональна тактовой частоте.
Надо отметить, что микропроцессоры, используемые в ПЛК, на несколько поколений отстают от процессоров офисных персональных компьютеров в связи с относительно малым объемом рынка ПЛК, который не обеспечивает окупаемость разработки нового контроллера за период смены поколений микропроцессоров. Однако на такую «отсталость» можно посмотреть и с другой точки зрения. Отработанный за несколько лет выпуск конкретных БИС микропроцессоров, выверенные для них схемотехнические и программные решения позволяют обеспечивать высокую надежность промышленных контроллеров. Надежность же этих устройств является критерием, явно превалирующим над другими, даже над производительностью.
Емкость памяти определяет количество переменных (тегов), которые могут быть обработаны в процессе функционирования ПЛК. Память контроллеров делят на несколько уровней иерархии в зависимости от частоты использования хранящихся в ней данных и быстродействия. Основными типами памяти являются постоянное запоминающее устройство (ПЗУ, ROM), оперативное запоминающее устройство (ОЗУ, RAM) и набор регистров. Регистры являются самыми быстродействующими элементами памяти, поскольку они используются арифметико-логическим устройством (АЛУ) для исполнения элементарных команд процессора. ПЗУ используют для хранения редко изменяемой информации — системное программное обеспечение (операционная система), драйверы устройств, загрузчик, исполняемый модуль программы пользователя. ОЗУ используется для хранения данных, которые многократно изменяются в процессе работы контроллера, например значения переменных, результаты промежуточных вычислений, диагностическая информация, данные для отображения на дисплее.
Часы реального времени процессорного модуля представляют собой кварцевые часы, которые питаются от батарейки и поэтому продолжают идти при выключенном ПЛК. Часы используются, когда необходима привязка данных или событий к астрономическому времени, например для управления уличным освещением в зависимости от времени суток, в системах охраны объектов и других случаях.
Сторожевой таймер (Watchdog Timer — WDT) представляет собой счетчик, который считает импульсы тактового генератора и в нормальном режиме периодически сбрасывается (перезапускается) работающим процессором. Если процессор «зависает», то сигналы сброса не поступают в счетчик, он продолжает считать и при достижении некоторого порога вырабатывает сигнал «Сброс» для перезапуска «зависшего» процессора.
Процессорный модуль ПЛК выполняет следующие задачи:
-
• собирает данные из модулей ввода в память, обрабатывает их в соответствии с прикладной программой пользователя и отсылает данные из памяти в модули вывода;
-
• выполняет обмен данными с устройством для программирования контроллера;
-
• выдает метки часов реального времени;
-
• осуществляет обмен данными с промышленной сетью;
-
• реализует стек протоколов промышленной сети (для этой цели могут использоваться вспомогательные коммуникационные процессоры);
-
• выполняет начальную загрузку и исполнение системного программного обеспечения (операционной системы);
-
• исполняет загрузочный модуль пользовательской программы системы автоматизации;
-
• управляет актами обмена с памятью.
К основным характеристикам процессорного модуля относятся:
-
• тип операционной системы или системного программного обеспечения;
-
• наличие исполнительной среды для системы программирования на стандартных языках;
-
• типы поддерживаемых интерфейсов (RS-232, RS-422, RS-485, CAN, USB, Ethernet и др.);
-
• типы поддерживаемых сетей (Modbus RTU, Modbus TCP, Ethernet, Profibus, CANopen, DeviceNet и др.);
-
• возможность подключения устройств индикации или интерфейса оператора (светодиодного или ЖК-индикатора, клавиатуры, мыши, операторной панели, дисплея с интерфейсами VGA, DVI или CMOS, LVDS, трекбола и др.);
-
• разрядность (8,16, 32 или 64 бита);
-
• тактовая частота микропроцессора и памяти;
-
• время выполнения команд;
-
• объем, иерархия и типы памяти (ОЗУ, кэш, ПЗУ-флеш, съемная флешидр.);
-
• типы встроенных функций (ПИД-регулятор, счетчики, ШИМ, алгоритмы позиционирования и управления движением и др.). Одной из тенденций в развитии ПЛК является использование
процессорных модулей разной вычислительной мощности для одного конструктива контроллера. Это позволяет получить серию контроллеров разной мощности и тем самым покрыть больший сегмент рынка, а также выполнить модернизацию контроллеров, купленных потребителями, путем замены всего одного модуля.
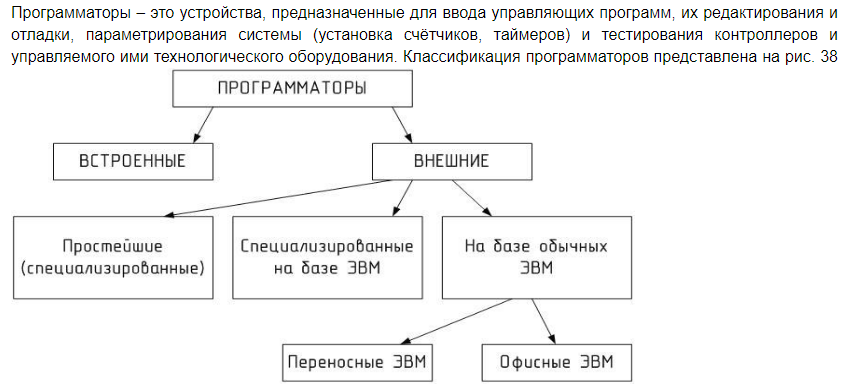
45 Программаторы. Программно-математическое обеспечение контроллеров.
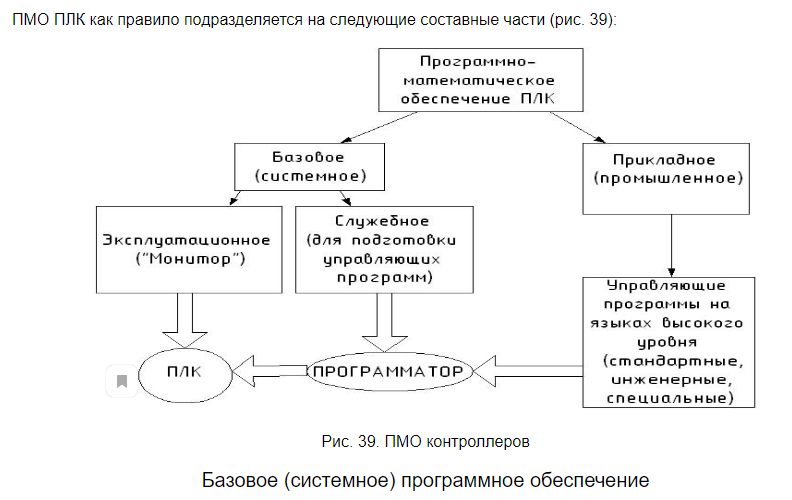
Базовое ПМО состоит из комплексных программ, поставляемых вместе с ПЛК, которые «зашиты» в их центральную память, и предназначены для решения вопросов, связанных с эксплуатацией этих контроллеров. Рассмотрим базовое ПМО на примере работы алгоритма программы «Монитор» (рис. 40).
После включения ПЛК и его инициализации загружается и запускается монитор, который выводит признак готовности центрального модуля к работе. После этого монитор переходит в режим ожидания команды, которая может быть введена с клавиатуры, с пульта управления или иначе. Введенную команду монитор распознает и, при ее успешной идентификации (анализа и распознавания) и отсутствия ошибки, выдает команду на загрузку из центральной памяти программы, необходимой для выполнения команды. Загруженной программе передается все дальнейшее управление. После окончания программы монитор вновь принимает управление на себя. Возможности монитора изменяются от выполнения небольшого числа команд (например, в случае микроконтроллера), до управления в реальном времени значительным числом внешних устройств.
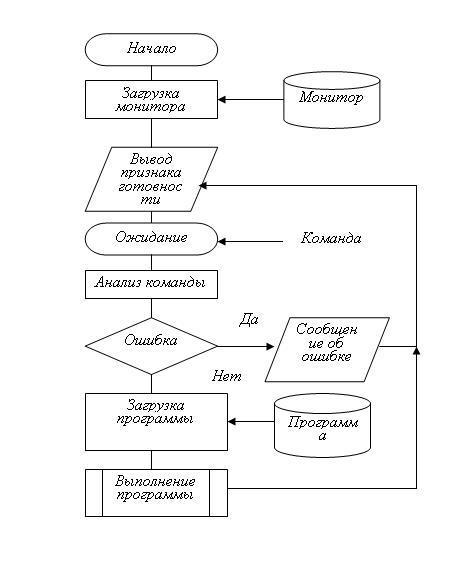
Рис. 40. Алгоритм программы «Монитор»
Прикладное (промышленное) программное обеспечение
Прикладное программное обеспечение рассмотрим на примере SIMATIC Soft фирмы «Siemens» – это система тесно связанных инструментальных средств для программирования и обслуживания систем автоматизации SIMATIC S7/C7, а также систем компьютерного управления SIMATIC WinAC. Эти инструментальные средства содержат исчерпывающий набор функций, необходимых для всех этапов разработки и эксплуатации систем автоматического управления: планирование, конфигурирование и определение параметров настройки аппаратуры и систем промышленной связи, разработка программ пользователя, документирование, тестирование, запуск и обслуживание, управление технологическими процессами, архивирование данных.
Интегрирование всех пакетов программ в единый интерфейс позволяет существенно повысить эффективность использования промышленного программного обеспечения SIMATIC и использовать однородные операции на всех этапах проектирования и эксплуатации систем промышленной автоматизации.
Промышленное программное обеспечение SIMATIC разрабатывается с учетом требований международных стандартов:
– DIN EN 6.1131-3, требованиям которого отвечают все языки программирования контроллеров SIMATIC. Это облегчает изучение программного обеспечения и позволяет снизить затраты на подготовку персонала.
– Windows 95/98/NT/Me/2000 с их графическими и объектно-ориентированными методами проектирования.
Весь комплекс промышленного программного обеспечения SIMATIC характеризуется следующими показателями:
– Общая система управления данными проекта (рис. 41). Все данные проекта, например, символьные переменные, параметры конфигурирования и настройки и т.д., хранятся в общей базе данных. Эти данные доступны всем инструментальным средствам, используемым в проекте. Это позволяет сократить время разработки проекта и избежать ошибок, связанных с многократным вводом одних и тех же данных.
– Согласованная система интегрированных инструментальных средств. Для каждой фазы разработки проекта могут использоваться свои, наиболее удобные для выполнения этих задач, инструментальные средства.
– Открытость. Системная платформа промышленного программного обеспечения SIMATIC открыта для интеграции в офисную среду управления.
Промышленное программное обеспечение SIMATIC отличается высокой производительностью:
– Проблемно-ориентированные инструментальные средства, обеспечивающие простоту решения широкого круга задач автоматизации.
– Многократное использование секций программы. Написанные ранее секции программ могут сохраняться в виде библиотек и легко копируются в новые проекты.
– Параллельная разработка отдельных частей проекта несколькими проектировщиками.
– Встроенные диагностические функции, существенно снижающие время отладки любой программы.
– Снижение затрат на проектирование за счет сокращения сроков его выполнения.
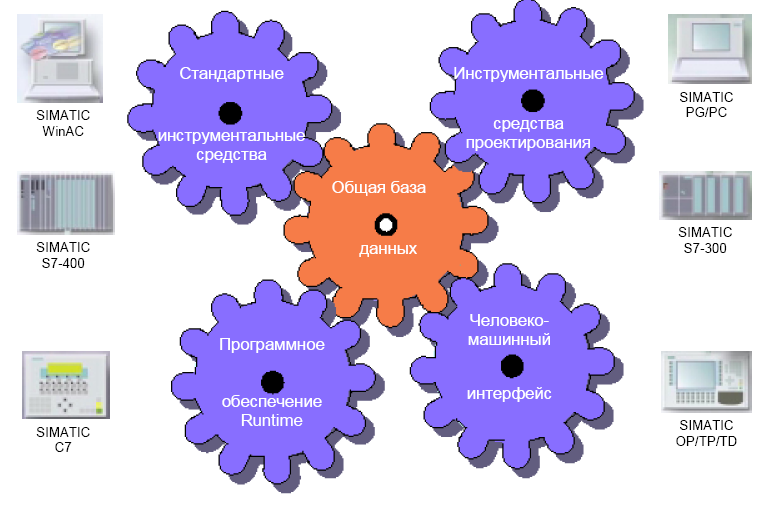
Рис. 41. ПМО SIMATIC Soft
Стандартные инструментальные средства используются для программирования аппаратуры SIMATIC S7/C7. Они включают в свой состав:
– STEP 7: полная версия пакета программирования всех систем автоматизации SIMATIC за исключением S7-200.
– STEP 7 Mini: упрощенный пакет для программирования систем автоматизации
SIMATIC S7-300 и SIMATIC-C7.
– STEP 7 Micro: наиболее простой пакет для программирования контроллеров SIMATIC S7-200.
Инструментальные средства проектирования имеют проблемную ориентацию и используются для расширения функциональных возможностей стандартных инструментальных средств. Применение инструментальных средств данного класса повышает удобство выполнения проектных работ, сокращает сроки проектирования и затраты на его выполнение. В состав инструментальных средств проектирования входят языки программирования высокого уровня, графические языки программирования, вспомогательное программное обеспечение для диагностики, моделирования, ведения документации и т.д.
Программное обеспечение Runtime позволяет использовать при разработке проектов заранее созданные программные блоки, выполняющие стандартные функции автоматического управления. Эти блоки могут вызываться из программы пользователя. Программное обеспечение runtime подразделяется на аппаратно зависимое и аппаратно независимое. Аппаратно зависимое программное обеспечение разрабатывается для конкретных видов оборудования, аппаратно независимое находит общее применение.
Человеко-машинный интерфейс включает в свой состав программное обеспечение для оперативного управления и мониторинга технологического процесса. Для решения этих задач могут быть использованы следующие пакеты программ: ProTool и ProTool/Lite, используемые для конфигурирования панелей оператора SIMATIC OP/TP/TD/MP и создания простых проектов визуализации на компьютерах, ProAgent, используемый для построения систем диагностирования технического состояния, SCADA система WinCC.