Материал: 111111111
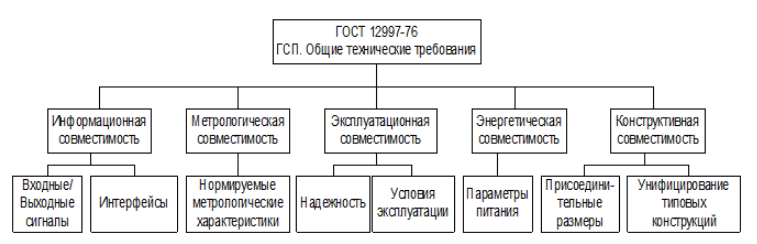
8.Стандарты гсп. Виды совместимости устройств гсп.
ГОСТ 26.010-80 Средства измерений и автоматизации. Сигналы частотные электрические непрерывные входные и выходные
ГОСТ 26.011-80 Средства измерений и автоматизации. Сигналы тока и напряжения электрические непрерывные входные и выходные
ГОСТ 26.013-81 Средства измерений и автоматизации. Сигналы электрические с дискретным изменением параметров входные выходные
ГОСТ 26.014-81 Средства измерений и автоматизации. Сигналы электрические кодированные входные выходные
ГОСТ 20504-81 Система унифицированных типовых конструкций агрегатных комплексов ГСП. Типы и основные параметры
ГОСТ 23945.0-80 Унификация изделий. Основные положения
9.Принципы построения гсп. Определение классификационных подразделений гсп.
Государственная система промышленных приборов и средств автоматизации
Для удовлетворения возросших потребностей промышленности в современных средствах получения, преобразования и передачи информации, а также для хранения и обработки сведений и выработки надлежащих команд управления создана Государственная система промышленных приборов и средств автоматизации.
В основу системы положены следующие принципы:
1). Оптимизация номенклатуры изделий путем создания параметрических рядов, у которых унифицированы входные и выходные сигналы, параметры питания, конструктивные исполнения и присоединительные размеры;
2). Создание «ветвей ГСП» по роду используемой вспомогательной энергии (пневматической, электрической, гидравлической);
3). Широкое использование блочно-модульного принципа построения как сомой системы, так и отдельных ее элементов;
4). Агрегатированное построение сложных устройств на основе типовых унифицированных блоков и приборов;
5). Совместимость приборов и средств автоматизации ГСП при работе в автоматических системах контроля, регулирования и управления.
Определение классификационных подразделений происходит по группам
В первую функциональную группу – группу устройств получения информации о состоянии процесса (объекта управления) – включают датчики, нормирующие преобразователи, устройства формирования алфавитно-цифровой информации.
Вторая функциональная группа – группа устройств приема, преобразования и передачи информации – объединяет коммутаторы измерительных цепей, преобразователи сигналов и кодов, шифраторы и дешифраторы, согласовательные устройства, телемеханические устройства измерения, сигнализации и управления. Устройства этой группы используются для преобразования сигналов, несущих измерительную информацию, и сигналов, несущих команды управления.
Третья функциональная группа - устройства обработки информации, формирования команд управления и представления информации оператором. В нее входят анализаторы сигналов, функциональные и операционные преобразователи, логические устройства, устройства памяти, регуляторы, задатчики, управляющие вычислительные устройства и комплексы.
Четвертую функциональную группу – группу устройств использования командной информации на объекте управления – составляют исполнительные механизмы, усилители мощности и вспомогательные устройства к ним, устройства представления информации.
10.Ветви и сигналы гсп. Основные виды унифицированных сигналов.
В зависимости от рода используемой энергии СИ и вспомогательные устройства ГСП подразделяют на четыре самостоятельные ветви: электрическую, пневматическую, гидравлическую и не использующей вспомогательной энергии.
Устройства гидравлической ветви применяются тогда, когда нужно обеспечить точное перемещение при больших усилиях, эти приборы - медленные.
Пневматические устройства применяются тогда, когда нужно обеспечить безопасность во взрывоопасных и агрессивных средах. У них сравнительно малая точность и расстояния. Требуется наличие пневмомагистрали.
Электрические – везде, во всех остальных случаях..
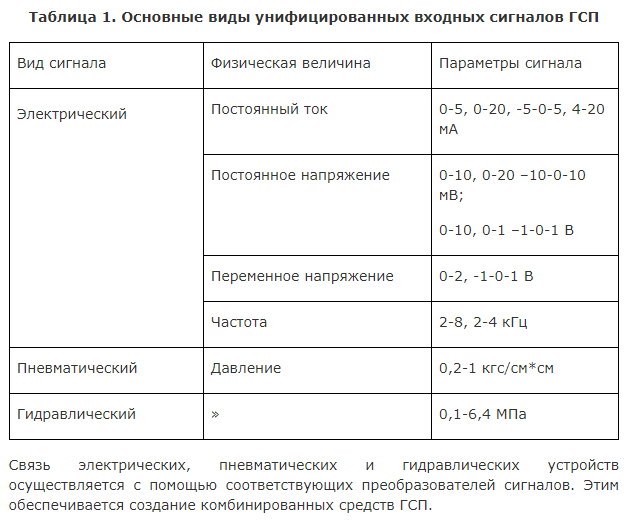
Все средства измерений и устройства электрической, пневматической и гидравлической ветви имеют унифицированные входные и выходные сигналы. В ГСП применяют унифицирующие сигналы различных групп, перечень которых приведен в таблице 1:
-
электрические непрерывные ток и напряжение,
-
электрические непрерывные частотные,
-
электрические дискретные,.
-
пневматические (70… 100 КПа),
-
гидравлические.
Основные виды унифицированных сигналов.
В основу построения ГСП положены следующие принципы: выделение устройства по функциональным признакам, минимизация номенклатуры изделий, блочно-модульное построение технических средств, агрегатное построение систем управления, совместимость приборов и устройств.
По функциональному признаку все изделия ГСП делятся на 4 группы: устройства получения информации о состоянии процесса; устройства приема, преобразования и передачи информации по каналам связи; устройства преобразования, хранения, обработки информации и формирования команд управления; устройства использования командной информации для воздействия на объект управления.
В зависимости от рода используемой энергии средства измерений и вспомогательные устройства ГСП подразделяют на 4 самостоятельные ветви: электрическую, пневматическую, гидравлическую и не использующую вспомогательной энергии.
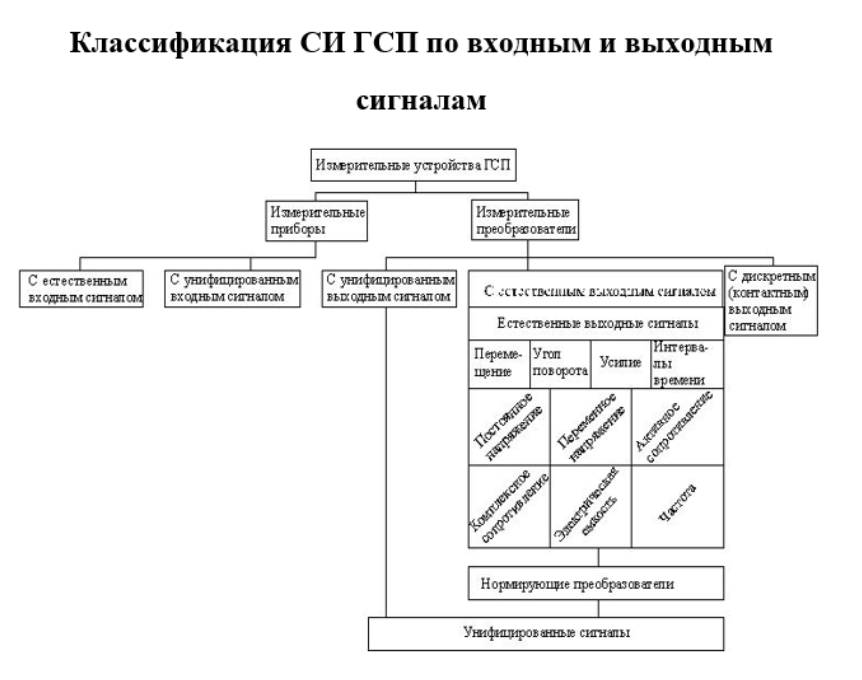
Под
«естественным» выходным сигналом
понимают выходную физическую величину
первичного измерительного преобразователя,
полученную однократным простым
(«естественным») преобразованием
измеряемой физической величины и не
соответствующую по параметрам
унифицированным сигналам. ![]()
![]()
![]() Для
преобразования естественного выходного
сигнала в унифицированный сигнал в ГСП
используются нормирующие преобразователи.
Для
преобразования естественного выходного
сигнала в унифицированный сигнал в ГСП
используются нормирующие преобразователи.
11.Классификация тса по функциональному назначению (схема). Технические средства автоматизации (тса)
В соответствии с ГОСТ 12997-84 весь комплекс ТСА по их функциональному назначению в САУ делят на следующие семь групп (рис.1).Ф

Рис. 1. Классификация ТСА по функциональному назначению в САУ:
СУ – система управления; ОУ – объект управления; КС – каналы связи;
ЗУ – задающие устройства; УПИ – устройства переработки информации;
УсПУ – усилительно-преобразовательные устройства; УОИ – устройства отображения информации; ИМ – исполнительные механизмы; РО – рабочие органы; КУ – контрольные устройства; Д – датчики; ВП – вторичные преобразователи
12. Чувствительные, усилительные и исполнительные элементы систем управления.
Исполнительные элементы-создают управляющие воздействия на объект управления. Они изменяют количество энергии или вещества, подводимой к объекту управления или отводимой от него, для того чтобы управляемая величина соответствовала заданному значению.
В автоматике широко применяются специальные устройства – усилители, способные в десятки и сотни раз увеличивать мощность сигнала, поступающего с выхода датчика. Необходимость применения усилителя объясняется тем, что выходной сигнал датчика обычно очень слаб и недостаточен для управления исполнительными механизмами.
Основными характеристиками усилителя являются его рабочая характеристика и коэффициент усиления.
Рабочая характеристика усилителя представляет собой зависимость между выходной и входной величинами при установившемся режиме:
![]() .
.
Коэффициентом усиления усилителя называют отношение значений величин на выходе и на входе усилителя:
![]() .
.
13.Обобщенная функциональная схема сау.
Эта блок-схема является инвариантной (общей), для всех систем автоматического управления.
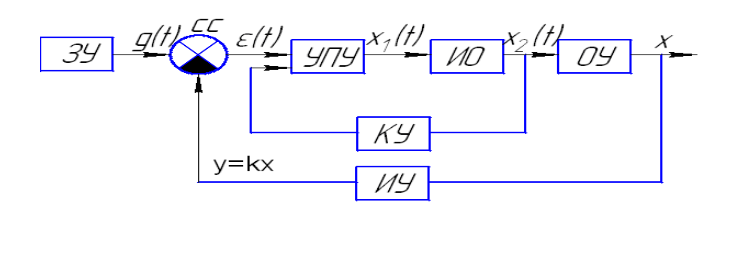
Зу – задающее устройство - формирует сигнал задающего воздействия g(t) пропорциональный заданному значению управляемой величиныx(t).
СС – система сравнения (схема сравнения),
ИУ – измерительное устройство,
(T) – сигнал рассогласования (сигнал ошибки),
(t) = g(t) – y(t),
где у(t)= k·x(t),
ε(t) → 0 – главная идея ТАУ.
ОУ – объект управления,
УПУ – усилительно-преобразоват. устройство (регулятор) – решает основную интеллектуальную функцию СУ.
ИО – исполнительный орган (привод подачи проволоки): гидравлический, пневматический, зубчатые, планетарные передачи. ИО может быть источник питания.
X1(t) – сигнал с выхода регулятора (УПУ),
X2(t) - управляющее воздействие ИО на ОУ.
КУ – корректирующее устройство
Z(t) – выходной сигнал КУ (местн. обр. связь)
Если задающее воздействие g(t) = const, то это соответствует случаю автоматич. регулирования, основанному на поддержании постоянного значения управляемой величины. Такие системы называются системами автоматического регулирования САР.
14.Понятие датчика. Основные характеристики датчиков управляемых величин.
Датчиком называется устройство, осуществляющее восприятие контролируемой величины и преобразования в величину, удобную для передачи по линиям связи и дальнейшего преобразования. Основные характеристики датчика: 1)входная величина – величина, воспринимаемая и преобразуемая датчиком. Все входящие величины могут быть разделены на 2 класса: 1класс – величины, характеризующие протекание процесса – энергетические величины, характеризующие интенсивность протекания процесса или параметра источника энергии, параметрические величины, характеризующие нагрузку. 2 класс – величины, характеризующие свойства и состав вещества.
2) выходная величина – изменение несущей величины, используемая для передачи информации. Изменение несущей величины может осуществляться по амплитуде, по временному признаку. Легкость преобразования в цифровую форму. Возможность коммутации сигналов простыми средствами без снижения точности передачи информации. Этим требованиям удовлетворяют сигналы высшего уровня, время импульсные сигналы.
3)
статическая характеристика –
функциональная зависимость между
изменениями входной и выходной
величины. Наиболее применимой
для большинства случаев является
линейная характеристика y=Sx, где S-
чувствительность датчика. ![]() .
При S →∞ характеристика принимает
релейный характер.
.
При S →∞ характеристика принимает
релейный характер.
4) порог чувствительности датчика – min изменение входной величины вызывающей изменение выходного сигнала.
5)
основная погрешность датчика – max
разность между получаемой величиной
выходного сигнала и его наминальным
значением, определяемым по статической
характеристике при нормальных целях
для данной входной величины. Выражается
как в абсолютных единицах, так и в
относительных и представляет собой
отношение к разности предельных значений
выходной величины, %: ![]() .
Нормальные условия эксплуатации считают:
температура окружающей среды 20±5 С,
атмосферное давление 760±20 мм.рт.ст.,
относительная влажность 60±20%, вибрация,
электрические и магнитные поля
отсутствуют.
.
Нормальные условия эксплуатации считают:
температура окружающей среды 20±5 С,
атмосферное давление 760±20 мм.рт.ст.,
относительная влажность 60±20%, вибрация,
электрические и магнитные поля
отсутствуют.
6) дополнительная погрешность, погрешности, вызываемые изменением внешних условий по сравнению с их нормальным значением. Выражается в %, отнесенных к изменению мешающего фактора на определенную величину.
7) динамическая характеристика – определяет поведение датчика при быстрых изменениях входной величины. Зависит от внутренней структуры датчика и его элемента.
15.Статические и динамические характеристики датчиков.
Любой датчик обладает параметрами, зависящими от времени, называемыми динамическими характеристиками. Если датчик имеет ограниченное быстродействие, он может регистрировать значения величины внешних воздействий, отличные от реальных в данный момент времени, иначе говоря, работать с динамической погрешностью. К динамическим характеристикам относятся: Время разогрева
Частотные характеристики/Быстродействие
/ Постоянная времени
Частота среза
Фазовый сдвиг
Резонансная (собственная) частота
Время разогрева – время между подачей сигнала возбуждения на датчик и моментом, когда датчик начинает работать, обеспечивая требуемую точность измерений. Большинство датчиков обладают несущественным временем разогрева, а например термостат – до нескольких минут.
Частотные характеристики – показывают, насколько быстро датчик реагирует на изменение внешнего воздействия (например, АЧХ). Частотные характеристики напрямую связаны с быстродействием датчика, которое выражается в единицах внешнего воздействия на единицу времени.
Частота среза характеризует наименьшую или наибольшую частоту внешних воздействий, которую датчик может воспринять без искажений. Верхняя частота вреза показывает, насколько быстро датчик реагирует на внешнее воздействие, а нижняя – с каким самым медленным сигналом он может работать.
Фазовый сдвиг на определенной частоте показывает, насколько выходной сигнал отстает от внешнего воздействия. Фазовый сдвиг измеряется либо в градусах, либо в радианах и указывается для датчиков, работающих с периодическими сигналами.
Статические характеристики
Статические характеристики датчика показывают, насколько корректно выход датчика отражает измеряемую величину спустя некоторое время после ее изменения, когда выходной сигнал установился на новое значение. Важными статическими параметрами являются: чувствительность, разрешающая способность или разрешение, линейность, дрейф нуля и полный дрейф, рабочий диапазон, повторяемость и воспроизводимость результата.
• Чувствительностьдатчика определяется как отношение величины выходного сигнала к единичной входной величине (для тонких измерительных технологий определение чувствительности может быть более сложным).
•Разрешение — это наименьшее изменение измеряемой величины, которое может быть зафиксировано и точно показано датчиком.
•Линейностьне описывается аналитически, а определяется исходя из градуировочной кривой датчика. Статическая градуировочная кривая показывает зависимость выходного сигнала от входного при стационарных условиях. Близость этой кривой к прямой линии и определяет степень линейности. Максимальное отклонение от линейной зависимости выражается в процентах.
•Статическое усилениеили усиление по постоянному току — это коэффициент усиления датчика на очень низких частотах. Большой коэффициент усиления соответствует высокой чувствительности измерительного устройства.
•Дрейфопределяется как отклонение показаний датчика, когда измеряемая величина остается постоянной в течение длительного времени. Величина дрейфа
может определяться при нулевом, максимальном или некотором промежуточном значении входного сигнала.
• Рабочий диапазон датчика определяется допустимыми верхним и нижним пределами значения входной величины или уровня выходного сигнала.
• Повторяемость характеризуется как отклонение между несколькими последовательными измерениями при заданном значении измеряемой величины в одинаковых условиях, в частности приближение к заданному значению должно происходить всегда и либо как нарастание, либо как убывание. Измерения должны быть выполнены за такой промежуток времени, чтобы не проявлялось влияние дрейфа. Повторяемость обычно выражается в процентах от рабочего диапазона.
• Воспроизводимость аналогична повторяемости, но требует большего интервала между измерениями. Между проверками на воспроизводимость датчик должен использоваться по назначению и, более того, может быть подвергнут калибровке. Воспроизводимость задается в виде процентов от рабочего диапазона, отнесенных к единице времени (например, месяцу).