Материал: Випускна кфалікаційна робота фінал V1.2
Пояснювальна записка 1
Інститут, факультет, відділення енергетичний 3
Кафедра, циклова комісія електротехніки та електромеханіки 3
Спеціальність 141 – Електроенергетика, електротехніка та електромеханіка 3
ОПП – Електроенергетика, електротехніка та електромеханіка 3
ЗАТВЕРДЖУЮ 3
З А В Д А Н Н Я 3
НА КВАЛІФІКАЦІЙНУ РОБОТУ 3
Примітка 4
РЕФЕРАТ 9
ВСТУП 11
1 ЗАГАЛЬНА ЧАСТИНА 13
1.1 Конструкція козлових кранів 13
1.2 Кінематична схема переміщення крана 15
1.3 Попередній вибір двигуна 17
1.3.1 Завдання для проектування 17
1.3.2 Розрахунок потужності електродвигуна механізму козлового крану 17
1.4 Побудова навантажувальної діаграми 19
1.5 Огляд системи керування крановим приводом 25
2 СПЕЦІАЛЬНА ЧАСТИНА 34
Вибір та обґрунтування системи керування ЕП. Математичне моделювання динамічних режимів 34
2.1 Будова частотного перетворювача 34
2.2 Вибір силових елементів напів-провідникового перетворювача 40
Випрямляч 40
LC-фільтр 43
Інвертор струму 45
Мережевий дросель 47
2.3 Побудова механічної характеристики 47
2.4 Система підпорядкового керування пч-ад, розрахунок і моделювання перехідних процесів 51
3 ТЕХНІКО ЕКОНОМІЧНЕ ОБГРУНТУВАННЯ 57
ПРИЙНЯТИХ РІШЕНЬ 57
4 ОХОРОНА ПРАЦІ 63
4.1 Законодавство України з охорони праці 63
4.2 Шкідливі фактори дільниці козлового крану 66
4.3 Заходи щодо поліпшення умов праці 67
ВИСНОВКИ 70
ПЕРЕЛІК ПОСИЛАНЬ 73
Додаток А 75
ВСТУП 10
1 ЗАГАЛЬНА ЧАСТИНА 12
1.1 Конструкція козлових кранів 12
1.2 Кінематична схема переміщення крана 14
1.3 Попередній вибір двигуна 16
1.3.1 Завдання для проектування 16
1.3.2 Розрахунок потужності електродвигуна механізму козлового крану 16
1.4 Побудова навантажувальної діаграми 18
1.5 Огляд системи керування крановим приводом 24
2 СПЕЦІАЛЬНА ЧАСТИНА 33
Вибір та обґрунтування системи керування ЕП. Математичне моделювання динамічних режимів 33
2.1 Будова частотного перетворювача 33
2.2 Вибір силових елементів напів-провідникового перетворювача 39
Випрямляч 39
LC-фільтр 43
Інвертор струму 44
Мережевий дросель 46
2.3 Побудова механічної характеристики 46
2.4 Система підпорядкового керування пч-ад, розрахунок і моделювання перехідних процесів 50
3 ТЕХНІКО ЕКОНОМІЧНЕ ОБГРУНТУВАННЯ 56
ПРИЙНЯТИХ РІШЕНЬ 56
4 ОХОРОНА ПРАЦІ 62
4.1 Законодавство України з охорони праці 62
4.2 Шкідливі фактори дільниці козлового крану 65
4.3 Заходи щодо поліпшення умов праці 66
ВИСНОВКИ 69
ПЕРЕЛІК ПОСИЛАНЬ 72
Додаток А 74
Реферат реферат
Робота містить: 74 стор., 11 мал., 3 таблиці,
1 додаток, 14 посилань.
КОЗЛОВИЙ КРАН, ЕЛЕКТРОДВИГУН, СИСТЕМА КЕРУВАННЯ,
ЧАСТОТНЕ РЕГУЛЮВАННЯ, ЧАСТОТНИЙ ПЕРЕТВОРЮВАЧ.
Об’єкт розробки: Електропривод переміщення козлового крану.
Ціль роботи: спроектувати систему переміщення козлового крану, згідно виданого завдання на проектування.
Область застосування: випускна кваліфікаційна робота.
В роботі відображені етапи проектування системи переміщення козлового крану, проведено математичне моделювання динамічних процесів, проведено техніко-економічне обґрунтування вибраних технічних рішень, розглянені питання охорони праці.
Вступ вступ
Розвиток напівпровідникової техніки в області електропривода дав можливіть створення перетворювальної техніки та систем автоматичного регулювання, що прийшли на зміну електромашинній і контакторній техніці.
Вантажопідйомне обладнання представляє собою один із засобів значного зменшення фізичної праці людини.
Преважна кількість вантажопідйомних машин має електричний привід механізмів і тому від ефективності та продуктивності цих машин залежать якісні показники використовуваного обладнання.
Устаткування кранів має в своєму складі серії кранових електродвигунів змінного та постійного струмів, серії силових і магнітних контролерів, командо апаратів, кнопкових пультів, кінцевих вимикачів, гальмових електромагнітів і електрогідравлічних штовхальників, пуско-гальмівних резисторів і ряд інших апаратів, що комплектують різні кранові електропривода.
3 розвитком напівпровідникової техніки в області електропривода з’явилася можливість впровадження її у системи автоматичного керування при проектуванні нового та модернізації існуючого обладнання.
Нові системи керування приводами змінного струму дозволяють підвищити їх швидкодію, економічність, масогабаритні дані, підвищити надійність.
Тому розгляд питань електропривода та автоматизації вантажопідйомних механізмів, які складають зміст випускній кваліфікаційної роботи, має актуальне суттеве практичне значения.
Метою випускної кваліфікаційної роботи є проектування системи переміщення козлового крану, моделювання перехідних процесів.
Загальна частина
1 Загальна частина
1.1 Конструкція козлових кранів
Козлові крани мають широке застосування при навантажувально-розвантажувальних роботах на складах і як технологічний транспорт на полігонах залізобетонних виробів, а також при монтажі споруд і приміщень. Відповідно розрізняють козлові крани загального призначення і монтажні. У перших вантажопідйомність до 32 т, прогін — до 32 м, висота піднімання — до 10 м, у других — вантажопідйомність до 100 т, прогін — 80 м, висота піднімання — до 80 м.
Козлові крани поділяються на безконсольні, одно- чи двоконсольні. Довжина консолі може досягати 25—30% прогону.
Несучий елемент безконсольного козлового крана (рисунок 1.1, а) — міст 4, піднятий над рейками на опорах 2 і 6. Перша опора найчастіше кріпиться до моста міцно, а друга — шарнірно або виготовляється гнучкою (тобто із зниженою міцністю), що компенсує температурні деформації моста та дефекти монтажу кранових шляхів.
У нижній частині опор закріплені візки 1, кожний з яких переміщується у кранів загального призначення однорейковою, а в монтажних — дворейковою колією. По мосту може рухатися вантажний візок 5. Схеми запасовки канатів піднімання вантажу та переміщення такого візка наведені на рисунках 1.1, б і в. Застосовують також крани із самохідним вантажним візком, на якому закріплений механізм піднімання вантажу. При вантажопідйомності до 5 т як вантажний візок може бути використаний тельфер. Візок може рухатися по верху моста і нижньому поясу двотаврової балки, прикріпленої до моста. У консольних козлових кранах, щоб пройти між опорами, візок повинен рухатися по нижньому поясу двотаврової балки.
Важкі монтажні козлові крани інколи мають два візки. Основний рухається верхнім, а допоміжний (меншої вантажопідйомності) — нижнім поясом моста, отже при монтажу новобудова буде в прогоні між опорами. Монтажні козлові крани використовуються лише для зведення довгих споруд із важкими елементами (корпуси теплових і атомних електростанцій та інше), монтажу обладнання доменних і цементних випалювальних печей. Кабіна керування 3 закріплюється переважно на жорсткій опорі.
Більшість козлових кранів — самомонтовані. Для цього стріловим краном укладають на шпальні клітки міст крана, встановлюють на рейки ходові візки, з'єднують шарнірно стояки опор із візками і мостом, стягують за допомогою лебідок праві й ліві стояки і встановлюють кран у робоче положення. В нижній частині стояки опор з'єднуються міцними поперечинами 7. Козлові крани обладнують обмежувачами висоти піднімання вантажу, переміщення візка й самого крана.
Перекинутися козловий кран може лише у випадку, якщо його сильним вітром зірве з гальм і прокотить до тупикових упорів. Тому великі козлові крани оснащують автоматичним протиугонним пристроями. При великій швидкості вітру спрацьовує анемометр, який вмикає двигун протиугонних захватів.
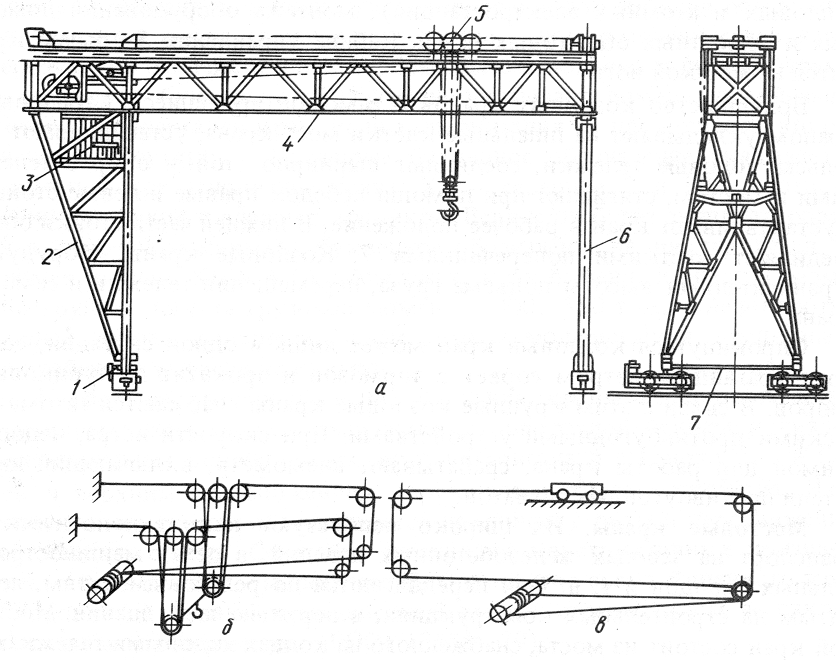
Рисунок 1.1 – Безконсольний козловий кран (а), схеми запасовки канатів піднімання вантажу (б) та переміщення візка (в):
1 — ходові візки; 2, 6 — жорстка і гнучка опори, 3 — кабіна керування, 4 — міст; 5 — вантажний візок; 7— поперечина, б — схема запасовки каната піднімання вантажу; в — схема запасовки каната переміщення візка
1.2 Кінематична схема переміщення крана
У механізмах пересування кранів найбільшого поширення набув багатодвигунний привід, при якому кожна кінцева балка моста приводиться в рух своїм самостійним приводом, причому між приводами, розташованими на різних кінцевих балках, існує зв'язок, здійснюваної за допомогою зовнішньої системи узгодження, крім самої металоконструкції. В результаті забезпечується одне призначення-горизонтальне переміщення крана по рейках. [2, 3]
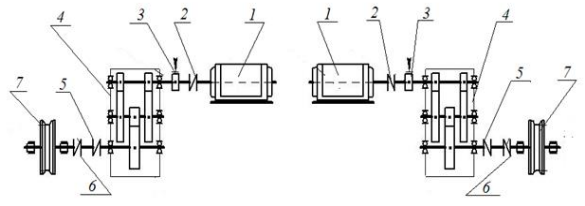
Рисунок 1.2 -Кінематична схема механізму пересування крана
Механізм пересування виконуються у вигляді одноколісних або балансирних візків, що з'єднуються з основою стійок опор або ходових балок, на які попарно спираються дві стійки. На малюнку 1.2 є два когерентно працюючих механізму пересування козлового крана. Каждий з механізмів включає в себе електродвигун 1, з'єднувальну муфту 2 з редуктором 4, та передає рух на провідні колеса 7. Вал приводного колеса з'єднаний з тихохідним валом редуктора проміжним валом 6 і зубчастими муфтами 5. На напівмуфті швидкохідного вала редуктора встановлений гальмо 3. [3]
Переваги індивідуального приводу полягають в компактності всього механізму пересування, менших махових моментах електродвигунів, в скороченні часу пуску.
Зазвичай для кранового електроприводу використовували двигуни змінного чи постійного струму спеціального призначення. Але з удосконаленням електроприводів, застосування двигунів на постійному струмі залишилося позаду. Сьогодні масове поширення набули асинхронні електродвигуни з фазним і короткозамкненим роторами. [4, 5]
Кранові електродвигуни проектують для експлуатації в повторно-короткочасному режимі, який характеризується тривалістю включення 15, 25, 40 і 60% при тривалості циклу не більше 10 хв. основним номінальним режимом кранових двигунів змінного струму є ПВ=40%. Отже, для вибору системи електроприводів варто звертати увагу на групи класифікації механізмів і параметричні вимоги тоннажності. [2, 5, 6]
1.3 Попередній вибір двигуна
1.3.1 Завдання для проектування
Розрахунок і аналіз електроприводу механізму пересування козлового крану із вантажопідйомністю 10 т.
Початкові дані
Маса всього крана без вантажу m=50 т
Вантажопідйомність крану m0=10 т
Швидкість підйому вантажу V=0,5 м/с
Довжина пересування механізма крана L=30 м
Діаметр ходового колеса D=0,5 м
ККД механізму η=0,85
Тривалість включення ПВ%=25%
1.3.2 Розрахунок потужності електродвигуна механізму козлового крану
Робота механізму козлового крану складається з наступних етапів: пересування навантаженого козлового крану та пересування козлового крану без вантажу.
Статична потужність при пересуванні козлового крана з вантажем, кВт:
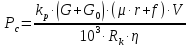 ;
;
 кВт.
кВт.
де G = 10000 · 9,81 = 98100 Н – сила ваги корисного вантажу;
G0 = 50000· 9,81 = 490500 Н – сила вантажу конструкції пересувної установки механізма козлового крану;
 =0,85 – ККД механізму;
=0,85 – ККД механізму;
V=0,5м/с – швидкість пересування механізму;
f = ( 0,4…1,2 )· 10 -3м –коефіцієнт тертя кочення;
μ= 0,1 – коефіцієнт тертя ковзання;
r = 250·10-3 м – радіус цапфи колеса;
RK = 0,25 м – радіус ходового колеса;
kp = 1,4 ÷ 1,5 = 1,45 – коефіцієнт тертя реборд коліс по рейці.
Статична потужність при пересуванні козлового крана без вантажу, кВт:
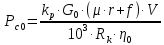 ;
;
 кВт.
кВт.
де η0 = 0,8 – ККД при переміщенні крана без вантажу.
Час циклу, с:

Час роботи двигуна за цикл, с:

 с.
с.
Час прямого (зворотного) ходу механізму козлового крану, с:


Час паузи, с:
 с.
с.
Попередній вибір потужності двигуна, кВт:

Вибираємо два двигуни серії MTKH-511-8
Номінальна потужність Pн=34 кВт
Номінальна частота обертання n=680 об/хв
Номінальний струм якоря I=79 А
Максимальний момент, що обертається Mmax = 1051,546Нм
Активний
опір фазної обмотки статора  Ом
Ом
Індуктивний
опір фазної обмотки статора  Ом
Ом
приведений до обмотки статора
Активний
опір фазної обмотки ротора  Ом
Ом
приведений до обмотки статора
Індуктивний
опір фазної обмотки ротора  Ом
Ом
Маховий
момент інерції 
Момент інерції J=1,075 кгм2
Коефіцієнт
потужності 