Материал: Учеб.пособие. Выбор передачи
*Примечание: 1тс = 10кН.
В табл. 4.9 обозначены: - J - индекс типоразмера; - Т/р - обозначение типоразмера, включающее буквенный и цифровой код. Первый указывает на принадлежность редуктора ряду одинарных одноступенчатых несоосных нереверсивных переборных передач типа AUS фирмы «Ренк» с вертикальным взаимным расположением осей. Числовой код показывает величину межцентрового расстояния сопрягаемых осей в сантиметрах; L - габаритная длина редуктора без учета входного вала, мм; B - габаритная ширина по опорной раме, мм; H - общая высота, мм; Р - максимальный допустимый упор винта, тс. Упорный подшипник встроен в корпус редуктора и расположен на оси колеса со стороны двигателя; - G - сухая масса редуктора, т.
На рис. 4.29 приведена диаграмма выбора редуктора из типоразмерного ряда AUS. Параметры выбора редуктора – передаточное число i и отношение мощности к частоте Ne/n - момент на входном валу. Диапазоны ниже ограничивающих кривых обеспечиваются типоразмерами, межосевое расстояние которых указано на кривых.
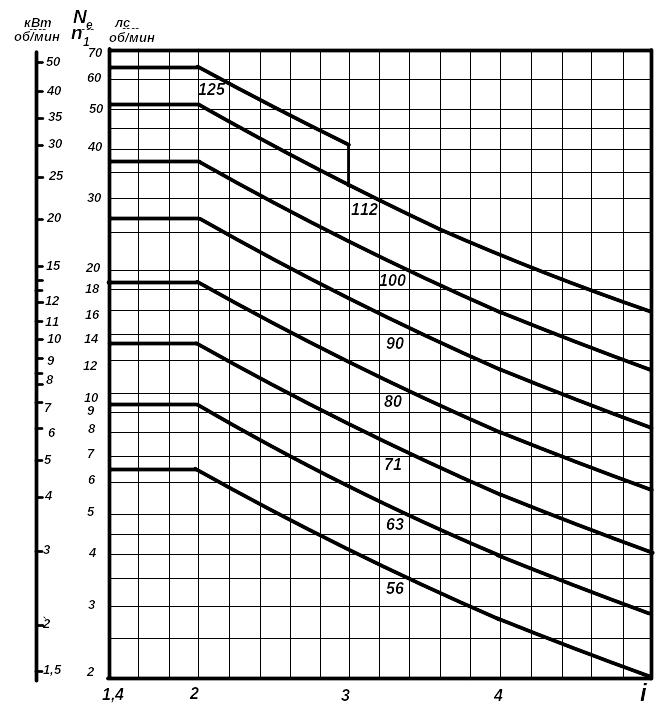
Рис.4.29. Диаграмма выбора редуктора из типоразмерного ряда
В случае недостаточности передаточного числа или передаваемого момента данного типоразмерного ряда следует обратиться к поиску других типоразмерных рядов либо заказать не стандартный, а особый редуктор, либо уменьшить передаточное число за счет увеличения частоты винта. В последнем случае диаметр винта должен быть уменьшен и его КПД снизится.
Рассмотрим последовательность выбора редуктора на примере, приведенном в [3]. Выполненные расчеты показали, что при максимально допустимом по осадке диаметре винта достигался пропульсивный коэффициент 0,67 и требовалась частота вращения винта 105 мин-1. Требовалось подобрать редуктор для получения такой частоты. Частота вращения принятых для анализа трех вариантах двигателей составляла, соответственно, 14V25/30, 14V28/32H - 1000 и 7L32/40 - 750 об мин. Для получения частоты выходного вала, равной 105 об/мин, требуется редуктор с передаточным числом 9,52 и 7,14 соответственно. Для включенных в базу типов редукторов AUS и HSU такие передаточные числа недопустимы. Для редукторов типа AUS фирмы «Ренк» допустимо передаточное число 5. Для редукторов типа HSU фирмы «Таске» допустимо передаточное число 6,3. Последнее ближе к требуемым значениям. Выбираем передачу из этого типоразмерного ряда.
С максимально допустимым передаточным числом на выходном валу редуктора типа HSU будет получено соответственно 159 и 120 об/мин. Проверим допустимость этих передач с двигателями 14V25/30, 14V23/32H и 7L32/40 соответственно.
В табл. 4.10 приведены исходные данные для выбора редуктора.
Таблица 4.10
Исходные данные для выбора редуктора для двигателя 14V25/30
Наименование переменной |
Обозначение |
Размерность |
Значение |
Частота вращения винта |
NW |
об/мин |
159 |
Частота вращения двигателя на режиме МДМ |
NLI |
об/мин |
1000 |
Мощность двигателя на режиме МДМ |
NEL1 |
кВт |
3080 |
Приведем результаты выбора редуктора из ряда HSU для СОД 14V25/30, полученные с помощью модели WYB_HSU.
Принят редуктор фирмы «Таске» типа HSU:
- типоразмер TRR = 900;
- передаточное число IRED = 6,29;
- развиваемый момент MRED = 3,08 кВт/мин-1;
- допустимый момент MDOP = 3,55 кВт/мин-1.
Для двигателей 14V28/32H и 7L32/40 исходные данные приведены в табл. 4.11. В результате применения модели WYB_HSU получены результаты выбора редуктора из ряда HSU для СОД 14V28/32H и 7L32/40, приведенные далее.
Принят редуктор фирмы «Таске» типа HSU:
- типоразмер TRR = 1000;
- передаточное число 1RED = 6.25;
- развиваемый момент MRED= 4,11 кВт/об/мин;
- допустимый момент MDOP = 4,78 кВт/об/мин.
Таблица 4.11
Исходные данные для выбора редуктора для двигателей 14V28/32Н и 7L32/40
Наименование переменной |
Обозначение |
Размерность |
Значение |
Частота вращения винта |
NW |
об/мин |
120 |
Частота вращения двигателя МДМ |
NLI |
об/мин |
750 |
Мощность двигателя на режиме МДМ |
NEL1 |
кВт |
3080 |
Момент увеличился в связи со снижением частоты входного вала, в результате был принят больший типоразмер, нежели для двигателя 14V25/30. Характеристики выбранных редукторов приведены в табл.4.12.
Таблица 4.12
Характеристики выбранных передач типа hsu
Типоразмер |
L |
B |
H |
G |
HSN 900 |
1900 |
2160 |
2550 |
14,5 |
HSN 1000 |
2100 |
2380 |
2830 |
19,75 |
В табл. 4.9 обозначены: типоразмер - обозначение типоразмера: буквенный код - принадлежность к ряду HSU и цифровой код - межцентровое расстояние в сантиметрах; L - длина без учета входного вала, мм; В - ширина габаритная, мм; Н - высота габаритная, мм; G - сухая масса, т. Так как мы приняли реально существующие типоразмеры передач, то частота выходного вала, а значит, и частота вращения винта и валопровода изменились: для ПК с двигателем 14V25/30 - до 159 об/мин и для двигателей 14V28/32H и 7L32/40 до - 120 об/мин.
Выполним анализ влияния этого фактора на пропульсивный коэффициент движителя. Результаты расчетов характеристик винта при заданных частотах N1 представлены в следующем виде:
DW = 3,9519. LP = 0,4138. P = 318,07.
VA = 8,4312. KT = 0,1812. KDE= 1,6909.
KW = 0,5123. СТА = 2,6940. IQ = 0,9695.
WT = 0,3514. TP = 0,2140. KPR = 0,6404.
N1 = 159.
DW = 4,5703. LP = 0,4891. P = 324,06.
VA = 8,6985. KT = 0,1812. KDE = 1,9554.
KW = 0,5572. СТА = 1,9282. IQ = 0,9719.
WT = 0,3309. TP = 0,2285. KPR = 0,6610.
N1 = 120.
Видно, что при выборе реально существующих передач пропульсивный коэффициент для ПК с СОД 14V25/30 снизился с 67 до 64%, то есть на 3% абсолютных.
Полученное для ПК с СОД 14V28/32H и 7L32/40 - это снижение меньше и составляет1%.
Указанное снижение пропульсивного коэффициента является следствием увеличения частоты и соответствующего уменьшения диаметра винта.
5. Определение параметров и выбор элементов электропередач
Показатели электропередачи зависят от характеристик входящего в них оборудования: электрогенераторов, электросети и электродвигателей.
Суммарная
мощность главных электрогенераторов
![]() кВт,
и приводящих их ГД
кВт,
и приводящих их ГД
![]() ,
кВт, определяется по формулам
,
кВт, определяется по формулам
![]()
где
![]() -
суммарная мощность ГЭД, кВт;
-
суммарная мощность ГЭД, кВт;
![]() -
КПД электродвигателей (ηгэд
= 0,92…0,94 для постоянного тока при Nгэд
= 600…5000 кВт, ηгэд
= 0,95…0,97 для переменного тока при Nгэд
=1000…4000 кВт и более); ηс
- КПД сети (кабельной), ηс
=
0,98…0,99; ηпр
-
КПД выпрямителей или преобразователей
частоты, ηпр
=
0,98…0,99; ηг
- КПД электрогенераторов (ηг
= 0,91…0,95 для постоянного тока при Nг
=
300…2500 кВт и выше, ηг
= 0,95…0,975 для переменного тока при Nг
=
1000…5000 кВт и более); ηп
– КПД передачи между двигателем и
электрогенератором.
-
КПД электродвигателей (ηгэд
= 0,92…0,94 для постоянного тока при Nгэд
= 600…5000 кВт, ηгэд
= 0,95…0,97 для переменного тока при Nгэд
=1000…4000 кВт и более); ηс
- КПД сети (кабельной), ηс
=
0,98…0,99; ηпр
-
КПД выпрямителей или преобразователей
частоты, ηпр
=
0,98…0,99; ηг
- КПД электрогенераторов (ηг
= 0,91…0,95 для постоянного тока при Nг
=
300…2500 кВт и выше, ηг
= 0,95…0,975 для переменного тока при Nг
=
1000…5000 кВт и более); ηп
– КПД передачи между двигателем и
электрогенератором.
Массогабаритные характеристики электропередач определяются выбором по каталогам соответствующих электрических машин и электроаппаратов. При отсутствии необходимого серийного оборудования и приближенной оценке можно воспользоваться следующими зависимостями:
-
удельная масса главных электрогенераторов
![]()
- удельная масса гребных электродвигателей (при частоте вращения nгэд = 110…200 мин-1)
![]()
Ширина B, м, указанных устройств:
![]() +
0,75;
+
0,75;
![]() .
.
Ориентировочная длина электрогенераторов и электродвигателей, м: L = (0,9…1,3), B – одноякорных, L = (1,2…1,3), B – двух якорных.
Для привода электрогенераторов в ДУ на ходовых режимах целесообразно использовать ГД. Частота вращения ГД на ходовых режимах может изменяться в широком диапазоне (обычно от 40% до 100% номинальной частоты) и зависит от принятой скорости судна, степени обрастания корпуса, волновой и ветровой нагрузок. В установках с ВРШ частота вращения ГД может поддерживаться стабильной изменением угла установки лопастей. Отклонение частоты вращения ГД от номинального значения при изменении условий и режимов эксплуатации может быть минимальным. В установках с ВФШ колебания частоты вращения ГД в условиях эксплуатации могут быть значительными. Данное обстоятельство затрудняет использование на судах валогенераторов переменного тока.
Для стабилизации частоты вращения электрогенераторов при изменяющейся частоте вращения ГД применяют тиристорные стабилизаторы частоты электрогенераторов и редукторы (мультипликаторы) с постоянной частотой вращения выходного вала.
Тиристорные стабилизаторы имеют сложную электронную систему управления частотой и пока не получили широкого распространения на судах. Редукторы (для МОД - мультипликаторы) с постоянной частотой вращения выходного вала выполняют планетарного типа с гидравлическим или электрическим управлением частотой вращения солнечных шестерен. На рис. 5.1 показана кинематическая схема такого редуктора с гидравлическим управлением частотой вращения вала шестерен 5. Управляющее устройство 3 электронного типа получает сигнал от информационного датчика частоты вращения 4 и путем переключения клапанов в насосе 2 изменяет частоту вращения гидравлического двигателя 1, который через шестерни связан с эпициклом ведущего вала (6, 7 - сателлиты).
Далее приведены значения частоты вращения, ведущего n1, ведомого n2 валов и вала солнечных шестерен 5 nс, мин-1:
n1 1100 1200 1250
n2 1200 1200 1200
nc 2200 1200 700
Испытания таких редукторов на стендах и в судовых условиях, даже при резких колебаниях частоты вращения вала ГД (от 75 до 104% номинальной частоты) показали, что колебания частоты вращения выходного вала редуктора не превышают 1%.
В табл. 5.1 приведены параметры судовых зубчатых передач с постоянной частотой вращения выходного вала.
Как видно, эти передачи имеют достаточно высокий КПД (94…96%) и приемлемые массогабаритные показатели. Применение их на судах с МОД позволяет снизить затраты на топливо при производстве электрической энергии на 20…30% с использованием более дешевых сортов тяжелого топлива. Срок окупаемости передач составляет два-три года.
Рис. 5.1. Кинематическая схема редуктора с постоянной частотой