Материал: Учеб.пособие. Выбор передачи
![]() .
.
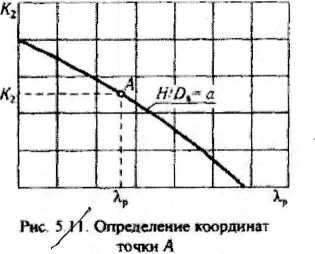
Рис. 1.2. Определение координат точки А
Допустим,
что на диаграмме
(рис
1.2) согласованному с двигателем винту
соответствует точка А с координатами
![]() и λp.
и λp.
Величина может изменяться в довольно широких пределах, из формулы (1.1) она равна
![]() .
(1.2)
.
(1.2)
Для
определения
![]() существует уравнение
существует уравнение
![]() ,
(1,3)
,
(1,3)
где
![]() - скорость судна, узл.;
- скорость судна, узл.;
![]() - коэффициент попутного потока, зависящий
от полноты корпуса судна, рассчитываемый
по формуле
- коэффициент попутного потока, зависящий
от полноты корпуса судна, рассчитываемый
по формуле
![]() .
(1.4)
.
(1.4)
Коэффициент
общей полноты корпуса
![]() равен
равен
![]() .
(1.5)
.
(1.5)
Взяв
данные прототипа судна (V,
L, B,
Т,
),
вычисляем по формулам (1.3)...(1.5) величины
![]() .
.
В
случае, если номинальная мощность
выбранного двигателя
![]() отличается от величины мощности двигателя
судна-прототипа
отличается от величины мощности двигателя
судна-прототипа
![]() ,
это следует учесть при расчете новой
скорости судна, используя известную
зависимость
,
это следует учесть при расчете новой
скорости судна, используя известную
зависимость
![]() .
Определив новую скорость судна, вычисляем
значение
.
Определив новую скорость судна, вычисляем
значение
![]() ,
по формуле (1.3).
,
по формуле (1.3).
Таким образом, координаты точки А определены. Она находится на кривой H/Dв = а.
По
известному для прототипа судна размеру
диаметра винта
![]() при неизменных остальных характеристиках
(Z
и
при неизменных остальных характеристиках
(Z
и
![]() )
определяем шаг откорректированного ГВ
и согласованного с ГД:
)
определяем шаг откорректированного ГВ
и согласованного с ГД:
![]() .
.
В результате ГВ будет иметь те же характеристики, что и у прототипа судна, за исключением шага Н.
Корректировку ГВ можно произвести за счет изменения его диаметра. В этом случае можно воспользоваться следующим приближенным равенством, справедливым для согласованных с ГД винтов:
![]() ,
,
где
![]() и
и
![]() - величины, на которые необходимо изменить
шаг и диаметр винта, чтобы получить шаг
и диаметр согласованного винта.
- величины, на которые необходимо изменить
шаг и диаметр винта, чтобы получить шаг
и диаметр согласованного винта.
Из этого выражения получим следующее приближенное равенство:
![]() ,
,
где D2 - новый диаметр согласованного винта при прежнем шаге Н1; С - постоянная.
Рассчитав корректировку ГВ за счет изменения шага и получив его значение Н2 при неизменном диаметре ГВ, равном D1, находим постоянную С:
![]() .
.
После чего, используя формулу, определяем диаметр откорректированного ГВ при условии сохранения его первоначального шага Н1:
![]() .
.
Примеры корректировки гребного винта для согласования его с главным двигателем [1].
Пример 1
Исходные данные прототипа судна.
Размерения корпуса судна:
объемное водоизмещение судна V = 27340м3,
длина между перпендикулярами L = 162 м,
ширина судна В = 23 м;
осадка в грузу T = 10м.
Скорость
хода в грузу
![]() = 15,3 узл.
= 15,3 узл.
Гидродинамические характеристики гребного винта:
диаметр
винта
![]() = 5,15 м;
= 5,15 м;
шаг винта H = 4,074 м;
шаговое отношение H/Dв = 0,79;
дисковое
отношение
![]() = 0,527;
= 0,527;
число лопастей Ζ = 4;
частота вращения винта n = 140 мин-1 (2,33 с-1).
1. По формуле адмиралтейских коэффициентов [2, 3] определяем требуемую мощность ГД:
![]() кВт,
кВт,
где Ca = 390…415 – адмиралтейский коэффициент, рассчитанный по судну-прототипу.
2. На судне установлен ГД устаревшей модификации и номинальной мощностью Νе1 = 8240 кВт с частотой вращения n1 = 140 мин-1 = 2,33 c-1.
3. По каталогам выбираем ближайший по параметрам с исходным ГД новый двигатель 7UEC52LA фирмы Mitsubishi номинальной мощностью Νе2 = 8240 кВт при частоте вращения вала n2 = 133 мин-1 = 2,22 с-1.
4. Произведем оценку согласованности нового двигателя с ГВ.
Разность частот вращения
![]() .
.
Следовательно, двигатель не согласован с характеристиками ГВ.
5. Подсчитаем количественную оценку несогласованности. Мощность, которую может развивать двигатель при работе на ГВ, по винтовой характеристике:
 кВт,
кВт,
или
![]() ,
,
т.е. будет недоиспользоваться 14% номинальной мощности ГД. При этом снижение скорости хода судна будет равно
![]() узл.
узл.
6. Вычисляем безразмерный коэффициент момента k22; для согласованного ГВ по формуле (1.1)
![]() .
.
7.
Определяем по формуле (1.3) относительную
поступь ГВ λр,
для чего сначала рассчитываем коэффициент
общей полноты корпуса судна
![]() по формуле (1.5) и коэффициент попутного
потока ω по формуле (1.4).
по формуле (1.5) и коэффициент попутного
потока ω по формуле (1.4).
![]()
![]()
![]() .
.
8. Выбираем по величинам Z = 4 и = 0,527 расчетную диаграмму действия гребного винта, на ней по координатам k22 = 0,034 и λр = 0,47 находим искомую точку А на кривой Η2/D1 = 0,9 (рис.1.3).
9.
Определяем шаг откорректированного
гребного винта для диаметра D1
= 5,15 м:
![]() м.
м.
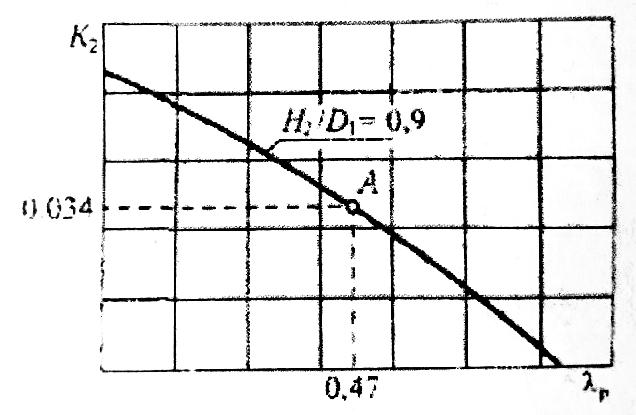
Рис. 1.3. Определение положения точки А
В результате ГВ будет иметь те же характеристики, что и у прототипа судна, за исключением шага Н.
10. Произведем корректировку винта путем изменения его диаметра.
При неизменном шаге ГВ H1 = 4,074 м определим диаметр откорректированного винта D2 через значение постоянной С:
![]() м;
м;
![]() м.
м.
Пример 2
Исходные данные прототипа судна возьмем из примера 1, т. е. пункты в данном примере 1 и 2 аналогичны пунктам 1 и 2 первого примера.
3. По каталогам подбираем новый главный двигатель 6UEC52LS фирмы Mitsubishi номинальной мощностью Ne2 =7940 кВт при частоте вращения вала n2 = 120 мин-1 = 2 с-1.
4. Произведем опенку согласованности этого двигателя с ГВ. Разность частот вращения
![]()
Следовательно, двигатель не согласован с характеристиками ГВ
5. Рассчитаем количественную оценку несогласованности.
Мощность, которую может развивать двигатель при работе на ГВ по винтовой характеристике
 кВт.
кВт.
Использование номинальной мощности двигателя составит
![]()
При этом снижение скорости хода судна будет равно
![]() узл.
узл.
6. Вычисляем безразмерный коэффициент момента k22 для согласованного ГВ по формуле (1.1)
![]()
7. Определяем возможную скорость хода судна при мощности ГД, равной Ne2 = 7940 кВт, используя известную зависимость Ne = c 3:
![]() узл.
узл.
8.
При тех же значениях
![]() и
и
![]() ,
рассчитанных в примере 1, вычисляем
величину относительной поступи винта:
,
рассчитанных в примере 1, вычисляем
величину относительной поступи винта:
![]()
9.
По координатам k22
=
0.042 и
![]()
![]() на расчетной диаграмме ГВ находим
искомую точку А
на кривой H2/D1
= 0,88.
на расчетной диаграмме ГВ находим
искомую точку А
на кривой H2/D1
= 0,88.
10. Определяем шаг откорректированного ГВ:
![]() м
м
11. При первоначальном неизменном шаге ГВ H1=4,074 м определим диаметр откорректированного винта D2 через значение постоянной C:
![]() м;
м;
![]() м.
м.
Пример 3
Исходные данные прототипа судна возьмем из примера 1. т е. пункты 1 и 2 совпадают.
3. По каталогам подбираем новый главный двигатель 6L50MC фирмы МAN-B&W номинальной мощностью Ne2 =7940 кВт при частоте вращения вала n2 = 148 мин-1 = 2,47 с-1.
4. Произведем оценку согласованности этого двигателя с ГВ. Разность частот вращения составляет
![]()
Следовательно, двигатель не согласован с ГВ.
5. Для количественной оценки несогласованности ГД с Г В необходимо определить допустимый режим работы нового двигателя по винтовой характеристике, соответствующий точке 3 (рис. 1.4), которая расположена на пересечении винтовой характеристики I с ограничительной характеристикой II по максимальному крутящему моменту двигателя, допустимая максимальная мощность в точке 3 по закону винтовой характеристики равняется:
В то же время эта мощность на ограничительной характеристике по максимальному крутящему моменту равна
![]()
где n3 - частота вращения, соответствующая режиму работы двигателя в точке 3.