Материал: Т2_ДГМ
при которых решение уравнения (2-9) будет экстремалью для функционала
Jv2 .
Для определения коэффициентов γ i целесообразно действовать в следующем порядке:
1.Составить операторное уравнение Эйлера-Пуассона, соответствующее виду «V2»:
∂V |
− |
d ∂V |
+ |
d2 |
|
∂V |
= 0 |
|
→ |
2x − 2γ |
|
&x& + 2γ |
|
x(4) |
= 0 , откуда |
|||||
2 |
|
|
2 |
|
|
|
|
2 |
|
1 |
2 |
|||||||||
∂x |
& |
2 |
|
|
&& |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
dt ∂x |
|
|
dx |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
γ |
2 |
p4 |
− γ |
1 |
p2 |
+1+ 0 |
|
(2-10) |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2.Составить уравнение, аналогичное (2-9), но для корней расположенных в правой полуплоскости комплексной переменной.
Если уравнение (2-9) имеет корни в левой полуплоскости: p1,2 = −ω0 ,то
искомое уравнение может быть получено как :
(p − ω |
)( p |
− ω |
) = p2 − 2ω |
0 |
p + ω2 |
(2-11) |
0 |
|
0 |
|
|
|
3.Составить уравнение, соответствующее уравнению Эйлера Пуассона (2-10) в операторной форме, путём перемножения уравнений (2-9), (2- 11) друг на друга
(p2 + 2ω0 p + ω02 ) ( p2 − 2ω0 p + ω2 ) = p4 − 2ω02 p2 + ω04 = 0
или после несложных преобразований |
|
||||
1 |
p4 − |
2 |
p2 +1= 0 |
(2-12) |
|
|
ω4 |
ω2 |
|||
|
|
|
|
||
0 |
|
0 |
|
|
|
4. Определить коэффициенты «γ i » путём приравнивания коэффициентов уравнения Эйлера_ Пуассона и соответствующего ему уравнения (2-
12) |
|
|
при |
|
одинаковых степенях оператора «p». В нашем примере: |
||||||
γ |
|
= |
|
1 |
;γ |
|
= |
|
2 |
. Таким образом, решение уравнения (2-9)_ будет |
|
2 |
ω4 |
1 |
ω2 |
||||||||
|
|
|
|
|
|||||||
|
|
|
0 |
|
|
|
0 |
|
|||
экстремалью для функционала
11
t |
|
2 |
+ γ |
|
2 |
+ γ |
&&2 |
|
Jv2 = ∫ |
(x |
& |
)dt . |
|||||
|
1x |
|
2x |
|||||
0 |
|
|
|
|
|
|
|
|
2.1.2 Формирование критериев качества при решении
детерминированных задач на параметрическую оптимизацию систем
управления с использованием эталонных моделей.
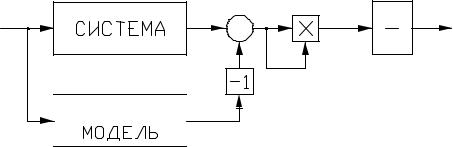
Другой практически часто применяемый подход к формированию функционала качества проектируемой системы при необходимости обеспечить ей наперёд заданную переходную характеристику основан на применении эталонных моделей. В этом случае, как показано на схеме рисунке 2.1, в процессе оптимизации на входы обеих систем подаётся
uу |
xв |
ε |
ε2 |
1 |
Jvэ |
|
|
|
|
p |
|











 xэ
xэ
Рисунок 2.1
ступенчатое входное воздействие, а функционал качества формируется как
э |
6в э 8 , |
(2-13) |
|
9 |
|
где в, э – выходные переменные проектируемой системы и эталонной модели, t – интервал времени, за который проектируемая система переходит из одного устойчивого состояния в другое. Желая обеспечить выходной переменной в движение, аналогично э , необходимо так подобрать варьируемые параметры проектируемой системы, чтобы э→ 0. Введение «ЭМ» для организации процедуры параметрической оптимизации СУ имеет свои достоинства и недостатки. Положительным моментом можно считать
12
отсутствие производных от выходной переменной в (2-13), что упрощает математическое выражение функционала качества и процедуру его вычисления. К недостаткам следует отнести необходимость реализации самой модели. Поэтому на практике стремятся задавать эталонное движение моделями сравнительно невысоких порядков.
Достаточно часто такие модели реализуют с использованием принципов модального управления, т.е. желания разместить корни характеристического уравнения замкнутой системы в соответствие с наперёд заданной стандартной формой.
Существуют различные подходы к выбору желаемых корней характеристического уравнения замкнутой системы. Если все корни выбираются одинаковыми, причем действительными и отрицательными со значением модуля равным ω0 , то характеристическое уравнение порядка n обращается в бином Ньютона
: ; 9 < |
(2-14) |
Стандартные формы, соответствующие (2-14) получили название биномиальных. Их вид для ряда значения «n» можно представить
следующим образом: |
|
H(p) =1 ;9 |
n=1; |
1 2;9 1;9 |
n=2; |
1 3;9 3;9 1;9 n=3;
1 4;9 6;9 4;9 1;9 n=4 и т.д.
Другим широко распределённым распределением корней, является распределение Баттерворта. В этом случае корни располагаются на полуокружности радиуса ω0 в левой полуплоскости комплексной переменной
13
«p». Угол между мнимой осью и лучом, проходящим через ближайший к ней корень и начало координат равен половине угла между соседними корнями.
Стандартная форма Баттерворта для ряда значений «n» имеет вид:
H(p) = 1 ;9 |
n=1; |
1 1,4;9 1;9 |
n=2; |
1 2;9 2;9 1;9 n=3;
1 2,6;9 3,4;9 2,6;9 1;9 n=4.
Если считать, что передаточная функция проектируемой системы (модели) по управлению имеет вид:
|
( p) = |
∆x ( p) |
= |
ωn |
|
W |
в |
0 |
, |
||
|
|
||||
у |
|
∆u( p) |
|
H( p) |
|
|
|
|
|||
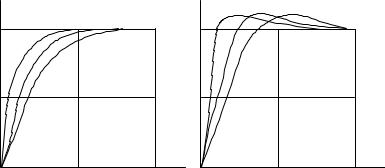
то есть её динамические свойства полностью определяются видом характеристического уравнения, и ввести в рассмотрение нормированное время ? ; 9 , то реакция систем спроектированных в соответствии с названными стандартными формами на единичное ступенчатое воздействие может быть представлена переходными характеристиками, показанными на рисунке 2.2.
x |
|
|
|
x |
|
n= 2 |
3 |
4 |
1,0 |
n= 2 |
|
|
1,0 |
|
|
|
|
|
3 |
4 |
|
|
|
|
|
|
0,5 |
|
|
|
0,5 |
|
|
|
|
|
|
|
|
ω0t |
|
|
|
ω0t |
0 |
Форма |
5 |
10 |
0 |
Форма 5 |
10 |
||
|
Биноминальная |
|
|
Баттерворта |
||||
|
|
|
|
Рисунок 2.2 |
|
|
||
14
Если при разработке системы стремиться обеспечить реакцию на ступенчатое воздействие в соответствие со стандартной формой Баттерворта, то эталонная модель может быть выполнена в соответствие с передаточной функцией:
@эм |
∆э |
;9 |
CD |
|
∆B |
2;9 2;9 ;9 |
|||
|
|
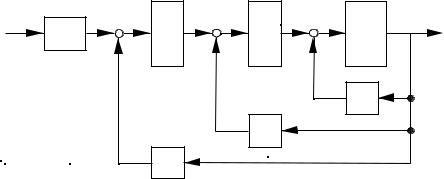
Структурная схема такой модели показана на рисунке 2.3
u(p) -αp |
ωо |
ωо |
ω |
xэ(p) |
|
e |
|
p |
2 |
о |
|
2p |
p |
|
|
||
|
|
|
|||
|
|
|
-1 |
|
|
|
|
-1 |
|
|
|
|
-1 |
|
|
|
|
Рисунок 2.3
Звено чистого запаздывания" CD" введено на вход эталонной модели 3-го порядка с целью имитации движений, соответствующих стандартным формам Баттерворта более высоких порядков. Обязательным условием успешной реализации поиска экстремума функционала (2-13) является необходимость обеспечения одинаковых статических коэффициентов передачи проектируемой системы и эталонной модели на каждом шаге движения к экстремуму. В противном случае условия решения задачи становится некорректным.
2.2 Формирование стохастической части составного критерия качества
Наиболее простым и часто употребляемым критерием оптимальности
системы по точности, при действии на неё случайных возмущений, является
15