Материал: Строительные машины (в вопросах и ответах)
В строительных машинах используются гидравлические, механические, пневматические усилители, а в электрических схемах, кроме того, электронные и электромагнитные.
Пневматические и гидравлические исполнительные механизмы,
использующие энергию сжатого газа (воздуха) и минеральных масел (несжимаемой рабочей жидкости), делят на самостоятельные и на работающие совместно с усилителями. Исполнительные механизмы, объединенные с усилителями, имеют различные конструктивные решения, часть из которых используется в строительных машинах.
Основным в таком приводе является регулирование скорости движения штока, выполняемое с дроссельным или объемным регулированием. При управлении с дроссельным регулированием входным управляющим сигналом является величина перемещения золотниковой пары или открытие дросселя, а выходным – величина перемещения поршня в гидроцилиндре. Гидро- и пневмопривод обеспечивает объекту управления возвратно-поступательное или вращательное движение. При управлении с объемным регулированием управляющими устройствами являются насосы переменной производительности, выполняющие функции усилительно-исполни- тельного механизма. При управлении с дроссельным регулированием используют золотниковые распределители или сопло-заслонку.
Электронные усилители по виду усиливаемого сигнала делятся на усилители тока (переменного и постоянного) и напряжения, а по числу каскадов – на одно- и многокаскадные. По принципу действия электронные усилители классифицируют на усилители дискретного (релейного) и аналогового действия. При этом в последние годы осуществляется интенсивный переход от полупроводниковых схем к интегральным схемам с микропроцессорами и микроЭВМ в контуре управления.
Основой микропроцессорного управления является модель реального процесса (рис. 180) при работе строительной машины. Она содержит три основных компонента, к которым относятся модельное состояние (описывающее процесс работы в каждый момент времени), функция модификации состояний (переход от одного модель-
261
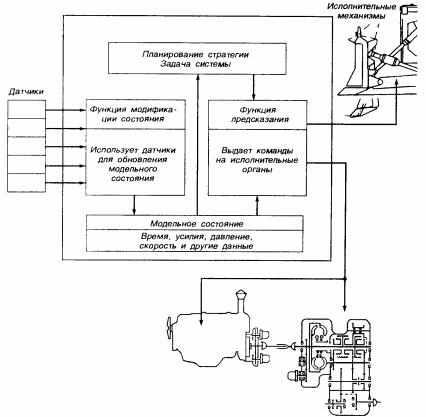
ного состояния к другому на основании сигналов датчиков) и функция предсказания (устанавливающая требуемое модельное состояние и формирующая набор команд наисполнительные органы).
Рис. 180. Основные компоненты микропроцессорной программы управления машинами
Использование бортовых микропроцессорных систем в строительных машинах позволяет значительно улучшить качество и безопасность выполняемых работ, увеличить производительность, продолжительность работы машины в исправном состоянии (за счет оптимизации режимов всей машины и ее узлов и агрегатов, связанных
262
с расходом топлива и действующими нагрузками) и вести постоянный контроль за состоянием как отдельных узлов, так и всей машины в целом.
78. Что представляют собой исполнительные устройства в системах автоматики строительных машин?
Исполнительные устройства предназначены для преобразования управляющих (командных) сигналов в регулирующие воздействия на объект управления (рабочий орган строительной машины). Практически все виды воздействий сводятся к механическому, т.е. к изменению величины перемещения, усилия, скорости возвратнопоступательного или вращательного движения. Исполнительные устройства являются последним звеном в цепи автоматического регулирования.
Наиболее распространены электрические исполнительные ме-
ханизмы, они включают в себя электродвигатели и электромагнитный привод. В общем случае все эти механизмы состоят из электродвигателя, редуктора, тормоза, соединительных муфт, контрольнопусковой аппаратуры и специальных устройств для перемещения рабочих органов. Они широко используются на башенных, козловых и мостовых кранах, смесительных установках, конвейерах и насосных установках.
Двухпозиционный двигатель (рис. 181) состоит из однофазного асинхронного электродвигателя и редуктора, которые расположены в общем корпусе.
Поворот регулирующего органа (например секторной задвижки бункера) на 180о осуществляется выходным валом редуктора через муфту. Одновременно через шток с помощью кулачкового механизма производится возвратно-поступательное движение другого рабочего органа. Двухпозиционное регулирование обеспечивается выключателем.
263
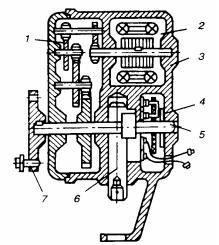
Рис. 181. Двухпозиционный двигатель: 1 – редуктор; 2 – однофазный асинхронный электродвигатель; 3 – корпус; 4 – выключатель; 5 – редуктор; 6 – шток; 7 – муфта
По характеру изменения положения выходного органа электродвигательные исполнительные механизмы могут быть постоянной и переменной скорости, а также шаговыми.
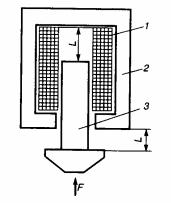
Электромагнитный привод (рис. 182) используется для управления механизмами в гидро- и пневмоприводах, а также различными вентилями и заслонками. Принцип работы этого привода состоит
впоступательном перемещении на величину L металлического якоря относительно электромагнитного вала катушки, расположенной
вкорпусе. Различают электромагнитные приводы одно- и двустороннего действия. В первом исполнении возврат якоря в исходное положение производится с помощью пружины, во втором – изменением направления управляющего сигнала.
Пневматические исполнительные механизмы выполняют мем-
бранными, сильфонными и лопастными.
Мембранные устройства делят на беспружинные и пружинные. Возвратно-поступательное движение штока осуществляется путем по-
264
дачи в подмембранную полость сжатого воздуха. При необходимости совершать поворотные движения в прямоходных исполнительных механизмах шток соединяется с шарнирно-рычажной передачей.
Рис. 182. Электромагнитный управляющий элемент: 1 – электромагнитныйвалкатушки; 2 – корпус; 3 – металлический якорь
Мембранные исполнительные механизмы применяют для управления регулирующими органами с перемещением штока до 100 мм и допустимым давлением в рабочей полости до 400 кПа.
Сильфонные устройства применяют редко. Они состоят из подпружинного штока, перемещающегося вместе с герметичной гофрированной камерой за счет давления управляющего воздуха. Их используют в регулирующих органах с перемещениями только до 6 мм. Однако сильфонные устройства имеют ограниченное количество циклов.
В лопастных исполнительных устройствах прямоугольная лопасть перемещается внутри камеры за счет давления управляющего воздуха, поступающего попеременно в одну или другую полость камеры. Эти устройства используют в исполнительных органах с углом поворота затвора на 60 или 90о.
Гидрораспределители управляют потоком рабочей жидкости, подаваемой в гидравлические двигатели (гидроцилиндры или гид-
265