Материал: Розробка структурної та електричної схеми вимірювального каналу швидкості обертання вала електродвигуна
Вольт-амперна характеристика фототранзистора при різних умовах освітленості показана на рисунку 2.7, Відносну спектральну чутливість приладів ілюструє рисунок 2.8 - відношення фотоструму колектора при поточному значенні довжини хвилі випромінювання до фотоструму на довжині хвилі максимальної чутливості).
Рисунок 2.7 - Вольт-амперна характеристика фототранзистора
КТФ102А при різних умовах освітленості
Рисунок 2.8 - Спектральні
характеристики фототранзистора КТФ102А
На рисунку 2.9 приведена схема
датчика швидкості обертання вала електродвигуна. До складу якої входять
фотодіод VD1, фототранзистор VT1, аналоговий компаратор DA1, підстроювальні
резистори RP1 та RP2, індикаторний світлодіод видимого спектра VD1.
Рисунок 2.9 - Електрична схема датчика швидкості обертання вала
електродвигуна
При подачі позитивного полюса напруги живлення
+5В на вивод 2 затискача ХТ1 та спільного провода на 3 затискач ХТ1, отримує
живлення ІЧ-світлодіод VD1 та мікросхема аналогового компаратора DA1. Для
обмеження струму на рівні 10мА через діод використаний резистор R1 визначимо
його номіал:
 (2.1)
(2.1)
де ![]() - струм через ІЧ-світлодіод VD1;
- струм через ІЧ-світлодіод VD1;
![]() - напруга живлення датчика (
- напруга живлення датчика (![]() ),
),
Вибираємо резистор С2-22 номіналом 470 (Ом) та потужністю 0,125Вт. Для регулювання інтенсивності випромінювання діода використане послідовне ввімкнення підстроювального резистора RP1. Обираємо змінний резистор 1кОм типу RV16LNT-B5K-1KQ.
Через резистор R2 подається напруга
живлення на колектор-емітер фототранзистора VT1. В якості резистора R2
вибираємо резистор С2-22 номіналом 10 (кОм) та потужністю 0,125Вт. В якості
аналогового компаратора використаємо мікросхему LM311 параметри якої наведені в
таблиці 2.3
Таблиця 2.3 - Параметри мікросхеми аналогового компаратора LM311
|
Параметри |
Значення |
|
Напруга живлення номінальна, В |
5 |
|
Мінімальна диференційна напруга спрацювання, мВ |
2 |
|
Час спрацювання, нс |
20 |
|
Вхідний максимальний струм, нА |
150 |
|
Струм споживання, мА |
50 |
|
Максимальна напруга живлення, В |
15 |
|
Максимальна вхідна диференційна напруга, В |
30 |
|
Робочий інтервал температури навколишнього середовища. °С |
-55...+125 |
|
Максимальна споживана потужність, мВт |
135 |
Для відображення стану виходу аналогового компаратора використовується світлодіод VD2, який ввімкнений через струмообмежувальний резистор R4, при спрацюванні компаратора діод гасне. В якості останніх виберемо світлодіод А200К та резистор типу С2-22 номіналом 470 (Ом) та потужністю 0,125Вт.
Для регулювання порогу спрацювання компаратора використаємо підстроювальний резистор RP2, в якості якого обираємо змінний резистор 10кОм типу RV16LNT-B5K-10KQ.
Для забезпечення стабільності напруги живлення та напруги спрацювання використаємо конденсатори С1 та С2 типу CKL-21 на 0,1мкФ, 16В.
Розроблена схема працює наступним чином: коли відбитий сигнал випромінювання діода від світлої рухомої поверхні освітлює фототранзистор це спричиняє його відкривання, і як наслідок, на вхід компаратора -IN поступає сигнал логічного нуля, при цьому на вході +IN присутній деякий позитивний потенціал, значення якого залежить від положення регулювального резистора RP2, отже на виході OUT компаратора присутній сигнал логічної одиниці, тобто компаратор спрацював, це індикується згасанням світлодіода VD2. При проходженні темної рухомої ділянки випромінювання діода поглинається і фототранзистор не відкривається, в цьому випадку на вході -IN поступає сигнал логічної одиниці, при цьому на вході +IN присутній деякий позитивний потенціал але менший 5В. За таких умов компаратор закривається, та на його виході встановлюється сигнал логічного нуля, про що індикує загоряння світлодіода VD2.
Для регулювання дальності та роздільної здатності датчика використовуються змінні резистори RP1 та RP2
.3 Розробка електричної схеми індикатора швидкості обертання вала електродвигуна
На рисунку 2.10 зображено електричну схему індикатора швидкості обертання вала електродвигуна, який здійснює обробку первинної вимірювальної інформації датчика та виведення інформації на дисплей.
Основним елементом схеми є мікроконтролер DD2. На сучасному етапі розвитку систем керування електроприводами мікропроцесорні системи керування набувають все більшої актуальності за рахунок їхньої гнучкості та багатофункціональності.
Побудуємо мікропроцесорний індикатор швидкості
обертання. На першому етапі визначимось з типом мікроконтролера (МК). В якості
МК вибираємо RISC мікроконтролер фірми Microchip PIC16F628А [8], який для
вирішення поставленої задачі має в своєму складі модуль 10 - розрядного АЦП,
модуль ССР який може працювати в режимі таймера модуля захвата та в режимі ШІМ,
адресований модуль USART та підтримка RS-232, RS-485, має оптимізовану
структуру та систему команд. Основні технічні характеристики мікроконтролера
PIC16F628А приведені в таблиці 2.4
Таблиця 2.4 - Основні технічні характеристики мікроконтролера PIC16F628А
|
ПараметриЗначення |
|
|
Об’єм пам’яті програм, байт |
2048 |
|
Об’єм пам’яті SRAM, байт |
224 |
|
Об’єм пам’яті EEPROM, байт |
128 |
|
Кількість портів вводу/виводу |
16 |
|
Кількість аналог. компараторів |
2 |
|
Таймери біт 8/16 |
2/1 |
|
Напруга живлення, В |
2-5 |
|
Максимальна частота генератора, МГц |
20 |
|
Робочий інтервал температури навколишнього середовища. °С |
-25...+100 |
|
Максимальна споживана потужність, мВт |
500 |
На вхід RB3 мікроконтролера (вхід CCP)
поступають цифрові сигнали з датчика швидкості обертання частота яких
пропорційна швидкості вала двигуна. Кнопка Reset забезпечує скид контролера.
Кнопки S1 та S2 відповідно призначені для вибору режиму налаштування, та зміни
коефіцієнта множення. В схемі застосовані підтягуючі резистори R1,2,3 типу
С2-22 номіналом 470 (Ом) та потужністю 0,125Вт. Для забезпечення стабільності
роботи мікроконтролера застосовано зовнішній кварцевий резонатор HC-49US з
частотою резонансу 8 МГц.
електродвигуна
Для скиду контролера підключена кнопка Reset через резистори R3 та R4 відповідно 10кОм та 470Ом. При натисненні кнопки на вхід скиду подається низький логічний рівень яким програма контролера переводиться на нульовий адрес лічильника команд.
Для індикації числа обертів застосовано рідиннокристалічний дисплей WC1602A [9] підключений по чотирипровідному інтерфейсу до контролера. Дисплей має два рядки по 16 символів. Для регулювання контрасту використаємо підстроювальний резистор RP1, в якості якого обираємо змінний резистор 1кОм типу RV16LNT-B5K-1KQ.
Для зв’язку МК з персональним комп’ютером (ПК)
по інтерфейсу RS-232 необхідно узгодити сигнали послідовної шини МК та ПК для
цієї мети служить мікросхема МАХ232 підключення якої зображено на рисунку 2.11.
Рисунок 2.11 - Підключення мікроконтролера до комп’ютера по
інтерфейсу
RS-232
Для спрацювання датчика необхідно на валу
двигуна встановити диск з чергуючими білими та чорними секторами кількість
секторів визначатиме вихідну частоту датчика при швидкості обертання 3000 об/хв
можна становити диск з одним сектором при частоті обертання 1500 для отримання
тієї ж частоти 50 Гц на виході необхідно встановити диск з двома секторами
(рисунок 2.12).
Рисунок 2.12 - Диски датчика на валу
двигуна
Для живлення пристроїв автоматики та
керування необхідно розробити стабілізований блок живлення до складу якого
входить трансформатор, діодний міст, інтегральний стабілізатор вхідні та
вихідні ємності. Живлення необхідне для контролера +5В, для цього використаємо
відповідний інтегральний стабілізатор L7805CV. Схема трансформаторного блоку
живлення приведена на рисунку 2.13.
Рисунок 2.13 - Схема
трансформаторного блоку живлення
Висновки: В даному розділі проведено
розробку електричних схем датчика та індикатора швидкості та обрано елементну
базу для їх реалізації.
3. РОЗРОБКА ПРОГРАМНОГО ЗАБЕЗПЕЧЕННЯ
ДЛЯ РОБОТИ ВИМІРЮВАЛЬНОГО КАНАЛУ
Як уже зазначалось в попередньому
розділі основним елементом вимірювального каналу швидкості обертання вала
двигуна являється мікроконтролер алгоритм його роботи і буде визначати
експлуатаційні характеристики каналу.
.1 Вихідні передумови написання
програми для мікроконтролера
Для роботи вимірювального каналу
використаємо режим захвата, який реалізовано в обраному мікроконтролері
РІС16F628A. Структурну схему модуля ССР в режимі захвата приведено на рисунку
3.1
Рисунок 3.1 - Структурна схема
модуля ССР в режимі захвата
При виникненні події захвата 16-розрядне значення лічильника TMR1 передаються в регістри CCPR1L: CCPR1H модуля CCP1. Подією захвата можуть бути:
Кожний задній фронт сигналу на вході RB3/CCP1;
Кожний передній фронт на вході RB3/CCP1;
Кожний 4 передній фронт на вході RB3/CCP1;
Кожний 16 передній фронт на вході RB3/CCP1;
Тип події захвата встановлюється бітами CCP1M3: CCP1M0 в регістрі CCP1CON<0:3>. Після виконання захвата встановлюється флаг переривання CCP1F(PIR1<2>) в «1» який повинен бути скинутий програмно. Якщо проходить подія захвата до того як попередні дані були прочитані, старе значення буде втрачено.
Знайдемо максимальне десяткове
значення результату захвата:
![]() (3.1)
(3.1)
де n - розрядність лічильника TMR1
(n = 16),
![]()
Розглянемо роботу канала при частоті
обертання n2 = 3000 об/хв при наявності одного сектора z =1, врахувавши, що
коефіцієнт подільника частоти k1 = 4 а тактова частота генератора Fos = 8000000
Гц. Знайдемо кількість імпульсів, які вкладаються в період вимірювальної
частоти
 (3.2)
(3.2)
![]()
При зменшенні частоти обертання період зростає, зростає і кількість імпульсів, при цьому необхідно врахувати те що ми не повинні допустити переповнення таймера. Знайдемо мінімальну частоту для запропонованого режиму:
 (3.3)
(3.3)
![]()
Для вимірювання нижчих швидкостей
необхідно збільшити кількість секторів чи вводити коефіцієнт корекції при
досягненні низької частоти.
.2 Розробка алгоритму роботи
програми
Алгоритм роботи основної частини
програми мікроконтролера представлений на рисунку 3.2.
Рисунок 3.2 - Алгоритм роботи мікроконтролера
Після проведення ініціалізації проводиться сканування стану кнопки вибору режиму при ненатисненій кнопці проводитьсь індикація та вимірювання з коефіцієнтом корекції 1 при натисненні кнопки вибору здійснюється перехід в меню вибору коефіцієнта корекції в залежності від кількості секторів. Вимірювання здійснюється по другому задньому фронту інформаційного сигналу.
Більш детально принцип роботи
вимірювального каналу проілюстровано на рисунку 3.3.
Рисунок 3.3 - Часова діаграма роботи
вимірювального каналу швидкості обертання електричного двигуна
Прямокутні імпульси (на рисунку 3.3)
це сигнали датчика обертання при досягненні першого заднього фронту
відбувається обнулення лічильника та регістра результату захвата, так як режим
захвата ввімкнений знову поченається нарощення цифрового коду в лічильнику. При
досягненні другого заднього фронта імпульса запрацьовує флаг і результат
захвату передається через регістр захвату в регістри обчислення.
3.3 Розробка програми та
програмування мікроконтролера
Для розробки програми мікроконтролера використане програмне забезпечення mikroC PRO for PIC яке виконує компіляцію проекта в файл прошивки. Для прошивки мікроконтролера використана фірмена програма від Microchip MPLAB,в якості програматора використаний ICD2. Лістинг програми мікроконтролера приведений в додатках.
Висновки: В даному розділі проведена
розробка алгоритму роботи мікроконтролера та способу реалізації тахометра
миттєвих значень на основі режима захвата модуля ССР мікроконтролера. По
алгоритму написана та прокомпільована програма мікроконтролера на мові програмування
С.
4. МОДЕЛЮВАННЯ РОБОТИ ВИМІРЮВАЛЬНОГО
КАНАЛУ
Для перевірки правильності
функціонування та налаштування вимірювального каналу необхідно використати
спеціальну програму симулятор Proteus Professional 7.2, яка дозволяє провести
наглядне моделювання електронних схем. На рисунку 4.1 зображено вікно
моделювання вимірювального каналу швидкості обертання вала двигуна в симуляторі
Proteus Professional 7.2 при частоті датчика 50Гц.
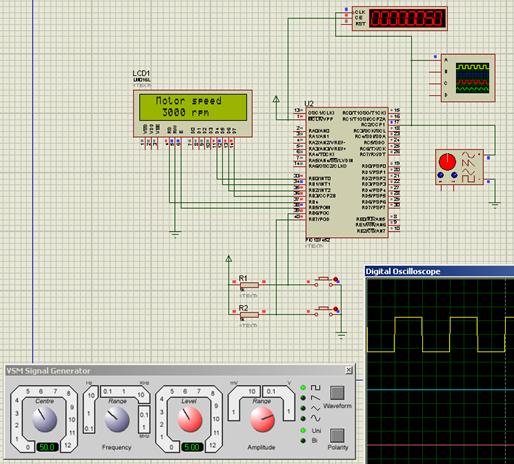
Рисунок 4.1 - Моделювання вимірювального каналу швидкості обертання вала двигуна в симуляторі Proteus Professional 7.2 при частоті
датчика
50Гц
Схема в симуляторі відповідає електричній схемі,
для генерації прямокутних імпульсів датчика швидкості використаний візуальний
генератор імпульсів. Параметри налаштування мікроконтролера в Proteus
Professional 7.2 приведені на рисунку 4.2.
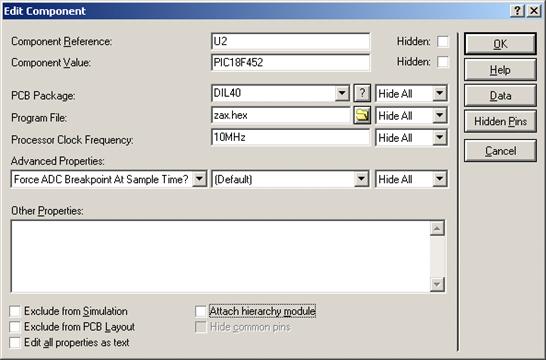
Рисунок 4.2 - Параметри налаштування
мікроконтролера вимірювального каналу в Proteus Professional 7.2
Коректність роботи вимірювального каналу при зниженні частоти до 25 Гц видно на рисунку 4.3. Спостерігається пропорційне зниження швидкості обертання.
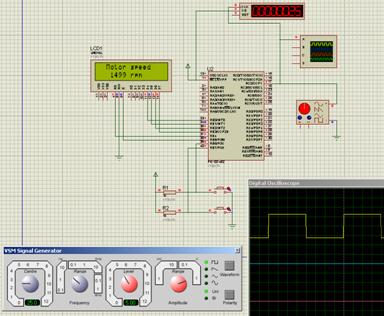
Рисунок 4.3 - Моделювання вимірювального каналу швидкості обертання вала двигуна в симуляторі Proteus Professional 7.2 при частоті
датчика
25Гц
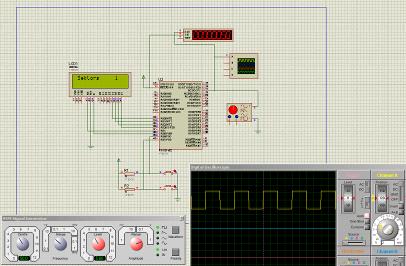
Рисунок 4.4 - Вибір кількості секторів
Висновки: Отже проведене комп’ютерне моделювання
розробленої мікропроцесорної системи в програмі-симуляторі довело роботоздатність
та адекватність програми та алгоритму до фізичної суті протікання процесів в
вимірювальній системі.