Материал: Прості ланки
Прості ланки
Зміст
1. ПРОСТІ ЛАНКИ
.1 Пропорційна ланка
.2 Інтегруюча ланка
.3 Диференційна ланка
. ЛАНКИ ПЕРШОГО ПОРЯДКУ
.1 Інерційна ланка
.2 Форсуюча ланка
.3 Інерційно-форсуюча ланка
. ЛАНКИ ІІ-ГО ПОРЯДКУ
.1 Коливна ланка
. ОСОБЛИВІ ЛАНКИ ЛІНІЙНИХ СИСТЕМ АВТОМАТИЧНОГО КЕРУВАННЯ
.1 ОСОБЛИВОСТІ ХАРАКТЕРИСТИК ДЕЯКИХ ЛІНІЙНИХ ЗВ’ЯЗКІВ
.2 СТІЙКІ НЕМІНІМАЛЬНО-ФАЗОВІ ЗВЯЗКИ
.3. Нестійкі зв’язки
СПИСОК ВИКОРИСТАНОЇ ЛІТЕРАТУРА
1. ПРОСТІ ЛАНКИ
1.1
Пропорційна ланка
Найбільш простою являється ланка,
вихідна величина котрого прямо пропорційна вхідній величині. Рівняння такої
ланки:
![]()
де к - коефіцієнт підсилення ланки.
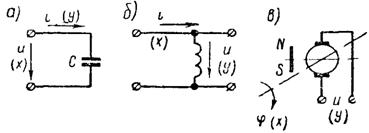
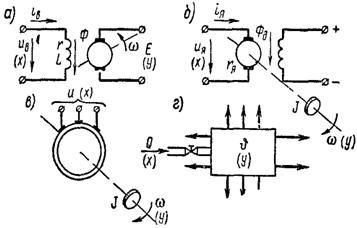
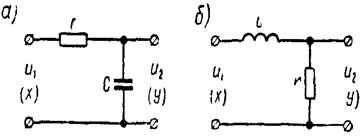
Прикладом такої ланки являються:
дільник напруги (а), підсилювач постійного струму (б), ричажна передача (в),
редукторна передача (г) та інші.
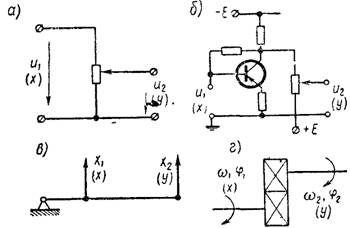
Вважається, що передача сигналу від входу до виходу проходить миттєво без якої-небудь інерції. Тому пропорційні ланки називаються безінерційними.
Якщо на вхід пропорційної ланки
подати синусоїдальний сигнал
![]()
то на виході появиться сигнал
![]()
Де ![]()
В комплексній формі
![]() або
або![]()
комплексний коефіцієнт
підсилення
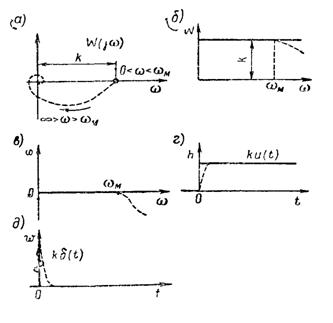
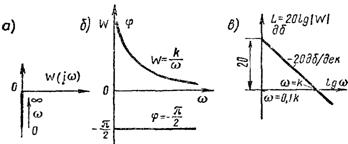
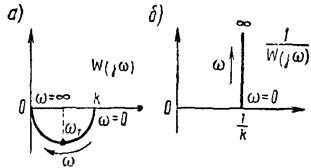
Годограф комплексного
коефіцієнта підсилення W(jω) при ![]() має вид
точки, сдвинутої на відстань к від нуля по дійсній осі (а).
має вид
точки, сдвинутої на відстань к від нуля по дійсній осі (а).
Прийнятий опис зв’язку між
входом і виходом відповідає ідеальній ланці, а для реальної ланки справедливо
тільки при частотах, менших визначеної максимальної величини ![]()
При більш високих частотах прийнятий математичний опис ланки перестане бути справедливим і коефіцієнт підсилення, за рахунок малих не врахованих параметрів зменшується до нуля.
Для дільника напруги таким
малим параметром може бути ємність вихідних проводів; для підсилювача -
розподільник ємності і індуктивності кола; для механічної передачі - міцність
ричагів і валів. Тому при збільшенні ω до
безконечності коефіцієнт підсилення любої реальної ланки зменшується до нуля і
годограф коефіцієнта підсилення при ![]() має характер графіка, показаного на
рис (а) пунктиром.
має характер графіка, показаного на
рис (а) пунктиром.
Однак в системах автоматичного
управління зазвичай розглядається діапазон порівняно низьких частот, для котрих
![]() < ω <
< ω <
![]() і всі
розглянуті прилади можуть бути віднесені до категорії пропорційних (без
інерційних) ланок, а годограф коефіцієнта підсилення має вигляд точки к.
і всі
розглянуті прилади можуть бути віднесені до категорії пропорційних (без
інерційних) ланок, а годограф коефіцієнта підсилення має вигляд точки к.
Відповідні амплітудно-частотні і фазочастотні характеристики показані на мал.(6) і (в).
В дальнішому під пропорційною
будемо розуміти таку ідеальну ланку, в якій постійність коефіцієнта підсилення
може бути прийнято в цілому діапазоні частот![]()
Переходячи від коефіцієнта
підсилення до передаточної функції
![]()
а потім до перехідної і
вагової функціям, отримаємо
Графічне зображення
перехідної і вагової функцій пропорційної ланки показано на мал. (г) і (д). Обі
ці функції відповідають ідеальній пропорційній ланці. Реальні ланки, схеми яких
зображені на рисунку, мають характеристики, які приблизно описуються цими
графіками. Відхилення реальних характеристик від ідеальних на графіках показано
пунктиром.
1.2
Інтегруюча ланка
Існує ряд ланок, в яких
вхідна величина пропорційна або рівна інтегралу по часу від вхідної величини
де k - деякий коефіцієнт пропорційності.
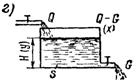
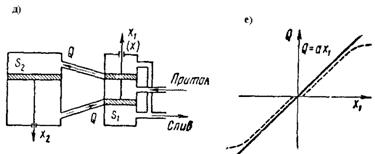
Приклад. Прикладами реальних
елементів, еквівалентні схеми яких зводяться до інтегруючої ланки, являються:
електрична ємність (а), індуктивність (б), обертаючий вал (в), гідравлічний
резервуар (г), гідравлічний підсилювач (мал. 3.5,а).
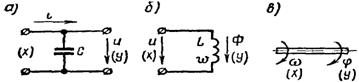
Напруга на ємності
магнітний потік в
індуктивності
кут повороту вала
рівень води в гідравлічному
резервуарі
де i - струм в ємності С, u - напруга на котушці з числом витків w, ω - кутова швидкість обертання вала, Q-G - результуючий приток води в резервуар з поверхністю S.
Інтегруючою ланкою може бути
приблизно описаний і гідравлічний підсилювач. Переміщення поршня золотника ![]() , приводить
до зміни притока і зливу рідини Q в робочому циліндрі і відповідно - до
переміщення робочого поршня
, приводить
до зміни притока і зливу рідини Q в робочому циліндрі і відповідно - до
переміщення робочого поршня ![]() відносно початкового положення
відносно початкового положення ![]() .
.
Залежність між ![]() і Q при
постійності тиску в циліндрах системи представлена графіком, показаним на мал.
(е) пунктиром. Приблизно цей графік може бути замінений прямою
і Q при
постійності тиску в циліндрах системи представлена графіком, показаним на мал.
(е) пунктиром. Приблизно цей графік може бути замінений прямою ![]() , зображено
на малюнку сполошною лінією.
, зображено
на малюнку сполошною лінією.
Із умови нестикаємості рідини
отримаємо що
![]()
![]()
де![]() - площа
робочого поршня.
- площа
робочого поршня.
І, відповідно,

або
![]() і
і 
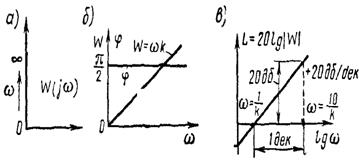
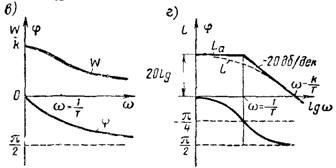
Комплексний коефіцієнт
підсилення інтегруючої ланки
Частотний годограф (а) і частотні
характеристики (б) інтегруючої ланки показані на рисунку
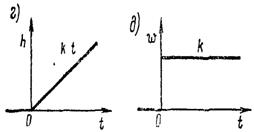
Логарифмічна
амплітудно-частотна характеристика ![]() функції
функції![]() має вид
прямої з нахилом - 20 дб/дек, т. є. при зміни частоти в 10 раз
має вид
прямої з нахилом - 20 дб/дек, т. є. при зміни частоти в 10 раз![]() зменшується
на 20 Дб (мал. в). Графік
зменшується
на 20 Дб (мал. в). Графік![]() для
інтегруючої ланки перетинає вісь абсцис при
для
інтегруючої ланки перетинає вісь абсцис при![]()
Перехід від коефіцієнта
підсилення передаточної функції
![]()
а потім - до перехідної і
вагової функціям, отримаємо
![]()
![]()
рис (г) і (д).
1.3
Диференційна ланка
Не існує такого реального елемента, в якого на виході точно відтворилася б похідна від любого вхідного сигналу. Однак при складанні структурної схеми системи її можна так розділити на ланки, що введені поняття диференційної ланки буде повністю обосновано.
В даному випадку вихідна
величина y залежить від вхідної величини![]() як похідна
як похідна
![]()
де![]() - коефіцієнт
пропорційності.
- коефіцієнт
пропорційності.
Приклад Прикладами таких
ланок можуть бути електрична ємність (а), індуктивність (б), електричний
тахометр (в).
Струм в ємності
Напруга на індуктивності
і напруга на за жимах
тахометричного генератора постійного струму
пропорційні похідним від напруги, струму та кута повороту вала.
Комплексний коефіцієнт
підсилення
![]()
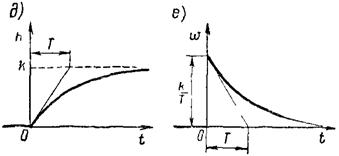
Всі частотнї характеристики
ланки показані на рис а, б, в.
Логарифмічна
амплітудно-частотна характеристика має додатній нахил в![]()
Передаточна функція
диференційної ланки
![]()
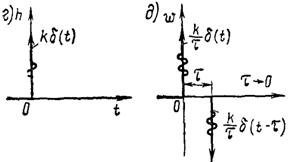
а відповідно перехідна і
вагова функції
рис (г) і (д).
Похідна від ![]() - функції
або
- функції
або ![]() - функція
другого порядку
- функція
другого порядку![]() на мал. (д)
зображена у вигляді двох імпульсів другого порядку, інтервал між якими
на мал. (д)
зображена у вигляді двох імпульсів другого порядку, інтервал між якими ![]() прямує до
нуля.
прямує до
нуля.
2. ЛАНКИ ПЕРШОГО ПОРЯДКУ
2.1
Інерційна ланка
Одним із найбільш поширених ланок
системи автоматичного управління являється інерційна ланка. Вона описується
рівнянням
![]()
де![]() і T -
відповідно коефіцієнт підсилення і постійна часу ланки.
і T -
відповідно коефіцієнт підсилення і постійна часу ланки.
Приклад. При лінеаризації
рівнянь прикладами інерційних ланок можуть бути виконуючі механізми (а),
електронні і магнітні підсилювачі (б,в) а також чотирьохполюсники, до складу
яких входять індуктивності або ємності (г).
Аналогічно із рівняння для
печі
Вважаючи що ![]()
![]() ,
, ![]() і
і ![]() , отримаємо рівняння
, отримаємо рівняння
Розглядаючи схеми
чотирьохполюсників показаних на мал, легко переконатися що для них також
справедливо рівняння ланок.
Для них k=1, Т = rC або ![]() , а
, а ![]() і
і ![]() .
.
Перейдемо від миттєвих
значень до частотних спектрів або до гармонічних сигналів
![]()
Частотні характеристики для цієї функції показані на мал а,б,в.
Тут
Поряд з характеристикою![]() інколи буває
зручно користуватися інверсною характеристикою
інколи буває
зручно користуватися інверсною характеристикою ![]()
Для інерційної ланки така характеристика показана на мал (6).
Якщо характеристика ![]() має вид
типічної кругової діаграми, в четвертім квадранті і опираючися на діаметр
має вид
типічної кругової діаграми, в четвертім квадранті і опираючися на діаметр![]() то інверсна
характеристика має вид прямої, що уходить із точки
то інверсна
характеристика має вид прямої, що уходить із точки ![]() в
безкінечність паралельно уявній осі.
в
безкінечність паралельно уявній осі.
Для побудови логарифмічної амплітудно-частотної характеристики виразимо її через
![]()
Ця залежність показана на
мал. 3.11, г пунктиром і позначена![]()
При побудові логарифмічних
характеристик користуються також їх асимптотними приближеннями. Для інерційної
ланки асимптотне приближене отримується шляхом заміни точної характеристики її
двома асимптотами при ![]() і при
і при ![]() . Перша
асимптота отримується шляхом відкидування
. Перша
асимптота отримується шляхом відкидування ![]() у виразі, а друга - шляхом
відкидування одиниці.
у виразі, а друга - шляхом
відкидування одиниці.
Для ЛАЧХ асимптотна характеристика описується двома рівняннями:
На мал (г) характеристика![]() показана
суцільною лінією (паралельній осі абсцис при
показана
суцільною лінією (паралельній осі абсцис при ![]() і маючи
нахил 20 дб./,дек. при
і маючи
нахил 20 дб./,дек. при ![]()
Передаточна функція
інерційної ланки відповідно
Відповідно перехідна функція

Вагова функція
Графіки перехідної і вагової
функцій інерційної ланки показані на мал. (д) і (е).
2.2
Форсуюча ланка
Ланка, яка описується
диференціальним рівнянням
![]()
називається форсуючою ланкою.
Така ланка отримується в результаті різних паралельних з'єднань пропорційної і диференціальної або інерційної ланок.
Для цієї ланки отримаємо: