Материал: Проектирование механизмов радиоэлектронных средств. учебное пособие. Андреев А.И., Андреев И.В
![]() .
(4. 35)
.
(4. 35)
Межосевое расстояние в червячной передаче без смещения:
![]() .
(4. 36)
.
(4. 36)
Геометрические расчеты червячных передач во многом аналогичны расчетам зубчатых механизмов.
4.5. Передача винт-гайка
В
передаче винт-гайка используют в основном
трапецеидальную резьбу (рис. 4.8,.а) и лишь
в отдельных случаях – метрическую (рис.
4.8, б). Резьба имеет наружный
![]() ,
внутренний
,
внутренний
![]() и средний
и средний
![]() диаметры (
относится к винту,
диаметры (
относится к винту,
![]() -
к гайке), шаг
-
к гайке), шаг![]() ,
теоретическую высоту H
и рабочую высоту профиля связаны H1
,
угол
профиля
,
теоретическую высоту H
и рабочую высоту профиля связаны H1
,
угол
профиля
![]() ,
угол подъема резьбы
,
угол подъема резьбы
![]() ,
число заходов
,
ход резьбы
,
число заходов
,
ход резьбы
![]() .
.
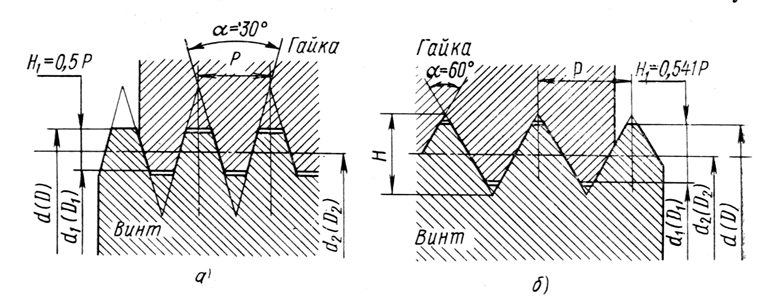
Рис. 4.8. Трапецеидальная (а) и метрическая (б) резьба
Для трапецеидальной
резьбы в стандартах определены профиль
и основные ее размеры. У этой резьбы
![]() ,
,
![]() ;
;
![]() ,
,
![]() мм,
мм,
![]() =1.5
мм.
=1.5
мм.
Для метрической
резьбы эти параметры даны в СТ СЭВ
640-77, угол профиля резьбы
![]() ,
шаг
и
высота профиля H.
Теоретическая высота H
и рабочая высота профиля связаны H1
= 5/8 H
= 0,541 P
для винта
и для гайки соответственно H/8
и
H/4.
,
шаг
и
высота профиля H.
Теоретическая высота H
и рабочая высота профиля связаны H1
= 5/8 H
= 0,541 P
для винта
и для гайки соответственно H/8
и
H/4.
Стандарт предусматривает для одного номинального диаметра резьбу с крупными и мелкими шагами (табл. 4.4).Резьбы с мелким шагом используют в соединениях, испытывающих вибрационные нагрузки, что обеспечивает лучшее самоторможение. Обозначение основной резьбы с указанием допуска имеют вид: для болтов M12-6q; для гаек M12-6H, для болтового соединения M12-6H/6q (для 6-й степени точности).
4.6. Механизмы прерывистого движения
Рассмотрим геометрические параметры мальтийского механизма с внешним зацеплением и четырехпазовым крестом (рис. 4.9).
Таблица 4.4
Параметры метрической резьбы
Номиналь-ный диаметр (1- ряд), мм |
Шаг резьбы ,мм |
Номи-нальный диаметр (1-ряд), мм |
Шаг резьбы ,мм |
||
Круп-ный |
Мел-кий |
Круп-ный |
Мелкий |
||
1 |
0.25 |
0.2 |
10 |
1.5 |
1.25; 1.0; 0.75; 0.5 |
1.2 |
0.25 |
0.2 |
10 |
1.5 |
1.25; 1.0; 0.75; 0.5 |
1.6 |
0.35 |
0.2 |
12 |
1.75 |
1.5; 1.25; 1.0; 0.75; 0.5 |
2 |
0.4 |
0.25 |
12 |
1.75 |
1.5; 1.25; 1.0; 0.75; 0.5 |
2.5 |
0.45 |
0.35 |
16 |
2 |
1.5; 0.75; 0.5 |
3 |
0.5 |
0.35 |
20 |
2.5 |
2.0; 1.5; 1.0; 0.75; 0.5 |
4 |
0.7 |
0.5 |
24 |
3 |
2.0; 1.5; 1.0; 0.75 |
5 |
0.8 |
0.5 |
30 |
3.5 |
2.0; 1.5; 1.0; 0.75 |
6 |
1.0 |
0.75; 0.5 |
36 |
4 |
3.0; 2.0; 1.5; 1.0 |
8 |
1.25 |
1.0; 0.75; 0.5 |
42 |
4.5 |
3.0; 2.0; 1.5; 1.0 |
Его
геометрическими параметрами являются
межосевые расстояния
,
радиус кривошипа
![]() ,
радиус фиксатора
,
радиус фиксатора
![]() ,
число пазов креста
,
угол между пазами креста
,
число пазов креста
,
угол между пазами креста
![]() ,
угол поворота кривошипа
,
угол поворота кривошипа
![]() при повороте креста угол
(рабочий угол кривошипа) и расчетные
радиусы креста
при повороте креста угол
(рабочий угол кривошипа) и расчетные
радиусы креста
![]() и
и
![]() .
.
Угол между пазами креста равен 20 = 2 /z, где =3-12.
Угол поворота кривошипа имеет вид 20 = 2 ( /2 - 0) = (z-2) /z. Радиус кривошипа определяют, задаваясь межосевым расстоянием а:
![]() .
(4. 37)
.
(4. 37)
Радиусы
креста равны
![]() и R2max
= A
cos(
/z).
Диаметр цевки кривошипа и ширина пазов
креста связаны
и R2max
= A
cos(
/z).
Диаметр цевки кривошипа и ширина пазов
креста связаны
![]() .
Условием безударного зацепления цевки
с пазами креста является зависимость
.
Условием безударного зацепления цевки
с пазами креста является зависимость
![]() .
.
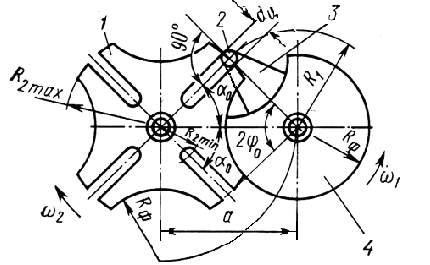
Рис. 4.9. Геометрия мальтийского механизма
Кинематическими
параметрами механизма являются период
цикла
![]() , коэффициент цикла движения
, коэффициент цикла движения
![]() и наибольшая угловая частота креста
и наибольшая угловая частота креста
![]() .
Период цикла механизма соответствует
времени одного оборота кривошипа и
равен сумме времени движения креста
.
Период цикла механизма соответствует
времени одного оборота кривошипа и
равен сумме времени движения креста
![]() и времени его покоя
и времени его покоя
![]() :
:
![]() ,
(4.38)
,
(4.38)
где
![]() -
частота вращения кривошипа об/мин.
-
частота вращения кривошипа об/мин.
Коэффициент цикла движения равен =tq/Tц=0/. Наибольшая угловая частота креста определяется выражением
![]() .
(4.39)
.
(4.39)
Динамические параметры механизма характеризуются ускорениями движения креста, значения которых в начальный и конечный моменты движения равны
![]() .
(4.40)
.
(4.40)
Ускорение уменьшается при увеличении числа пазов креста. Остановка механизма при выходе цевки из паза осуществляется секторным замком, выпуклая цилиндрическая поверхность которого входит в вогнутую поверхность креста и препятствует его повороту.
Основные параметры геометрии других механизмов прерывистого движения приведены на рис 4.10. Преимуществом секторного зубчатого механизма прерывистого движения по сравнению с мальтийским является возможность расширения характеристики цикла = tд/tп, а его недостатком- наличие жесткого удара при входе в зацепление. Для предотвращения самопроизвольного поворота ведомого колеса в период его покоя используются фиксирующие устройства. Зубчатые механизмы прерывистого движения применяют в устройствах дискретной цифровой техники и в ограничителях движения.
Если неполное число зубьев на ведущем колесе 1 (рис. 4.10 а) обозначить через Z11 при полном числе зубьев Z1 ,а число зубьев на ведомом колесе Z2, то угол поворота колеса 2 за один полный оборот колеса 1при 2=2 /Z2 равен
2 = (Z11 -1)2 /Z2 +k2 /Z2 =(Z11 + k –1)2 /Z2 ) (4.41)
Число k можно получить делением двойного угла 22, охватывающего дугу зацепления, на угловой шаг2, т.е k равно целому числу при делении 2 на 2. Угол 2 для передач без коррекции зубьев при rа1=dа1/2. rа2=dа2/2 определяют из выражения
cos22=(аw +rа2 - rа1)/(2аw rа2) =4Z1/(Z2+2)(Z1 +Z2) (4.42)
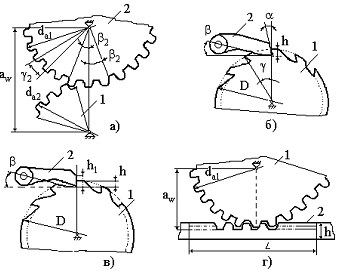
Рис. 4.10. Геометрические характеристики секторной зубчатой передачи (а), храпового механизма (б, в) и реечной передачи (г)
Храповые механизмы, получившие применение в конструкциях современных электронно- механических часов, используют для преобразования вращательного движения во вращательное с остановками Конструктивно такие механизмы содержат храповое колесо 1 и собачку 2, а основной характеристикой зацепления храпового колеса является модуль
m = P /= D / Z, (4.43)
где D – наружный диаметр храпового колеса.
Число зубьев храпового колеса определяется наименьшим углом его поворота . за один ход собачки
Z = 2 / . (4.44)
Число зубьев на храповом колесе Z=8-48, однако предпочтительное Z=12 –20 .Число зубьев можно уменьшить, используя две или три собачки. Собачки обычно прижимаются к храповому колесу с помощью пружин. Профиль зуба у колеса может быть с поднутрением (рис 4.9 б) или без него(рис. 4.9 в). Угол поднутрения составляет обычно =10 –150 и улучшает стопорение колеса. Угол = 10 –120 улучшает надежность зацепления. Высота зуба h = m, высота опорной части собачки h1 = 1.2 m. Длину зуба храпового колеса выбирают, исходя из допустимой удельной нагрузки [q]
b = Ft /[q] (4. 45)
Материал храпового колеса и собачки – термически обработанная сталь марок 20Х, 12ХН3, 40ХН.
При твердости НВ=280 –350 МПа величина [q] равна [q] 250 МПа, при твердости НВ=400 –500 МПа,[q] 400 МПа. Окружная сила, действующая на собачку и зуб храпового колеса
Ft = 2T1Kд /D (4. 46)
Для реечной передачи расчет геометрии зубчатого колеса производят как для обычного зубчатого зацепления, определяя делительный диаметр , диаметр впадин, диаметр выступов.
Затем рассчитывают длину рейки L реечной передачи
L = m Z, (4. 47)
где Z– число зубьев рейки, m – модуль зубчатого зацепления.
Межосевое расстояние aw в реечной передачи выбирают из соотношения
aw = d1 /2 + m /2 , (4. 48)
При этом высота рейки h, выбирается конструктивно и равна h=5-10мм, d1 – делительный диаметр колеса, определяемый выражением (4. 39), .m – модуль зубчатого зацепления
Контрольные вопросы
Что включает расчет геометрии фрикционных передач?
Каким образом определяется диапазон регулирования
лобового вариатора?
Как определяются межосевое расстояние, угол обхвата
и длина ремня для фрикционной передачи с гибкой связью?