Материал: Проектирование механизмов радиоэлектронных средств. учебное пособие. Андреев А.И., Андреев И.В
Общее передаточное отношение механизма, изображенного на (рис. 3.2 в) с учетом формулы (3.27) принимает вид
i1н (9) = - ( Z2 Z3 Z4 Z6 ) / (Z1 Z/ 2 Z/, 3 Z5 ) ( 1 + Z9 / Z7 ) (3.28)
Таким образом, при последовательно соединенных механизмах передаточное отношение от ведущего звена к ведомому равно произведению передаточных отношений отдельных зубчатых передач. Следует отметить, что и при последовательном соединении нескольких планетарных передач, изображенных на рис 3.2 в, общее передаточное отношение равно произведению передаточных отношений отдельных планетарных механизмов.
Контрольные вопросы
Что понимают под кинематическими характеристиками механизмов?
Какой метод используется для определения
передаточного отношения планетарных передач и в чем его сущность?
От чего зависят фунция положения, первая и вторая
передаточная характеристики кривошипно- ползунного механизма?
Что такое передаточное отношение зубчатых
механизмов?
Каким образом определяется передаточное отношение
для последовательно соединенных зубчатых передач?
Чему равно передаточное отношение для ступенчатого
соединения зубчатых колес?
Как определяется передаточное число зубчатых
механизмов, состоящих из двух колес?
От чего зависят первая и вторая передаточная
функции кулачкового механизма?
Каким образом находится передаточное отношение
для фрикционных передач?
Чему равно передаточное отношение червячной,
винтовой и конической зубчатых передач?
Как определяется передаточное отношение для
обращенного планетарного механизма?
Чему равны кинематические характетистики
синусногомеханизма?
В чем различие кинематических характеристик
передаточных и исполнительных механизмов РЭС?
Чему равны кинематические характеристики
тангенсного механизма?
Как определяется передаточное отношение
планетарной передачи?
4. РАСЧЕТ ГЕОМЕТРИИ ПЕРЕДАЧИ
И ЕЕ ДЕТАЛЕЙ
4.1. Фрикционные передачи
Фрикционные передачи роликами осуществляют передачу движения между параллельными и пересекающимися валами.
Сила трения возникает на образующей роликов (рис. 4.1.а) или на их торцовых поверхностях (рис. 4.1.б).
Сила нормального давления Q/2 создается силами упругости составляющих дисков 1 и 2.
Размеры передачи
зависят от диаметров роликов
![]() и
и
![]() ,
межосевого расстояния, равного а
w=
0.5 ((Д1 +
Д2).
,
межосевого расстояния, равного а
w=
0.5 ((Д1 +
Д2).
Задаваясь диаметром
,
определяют
![]() ,
где
,
где
![]() - передаточное число.
- передаточное число.
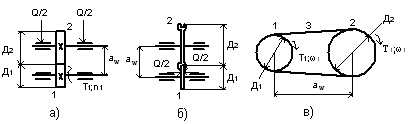
Рис. 4.1. Схемы фрикционных передач
При геометрическом расчете диаметров дисков 1 и 2 фрикционных механизмов с гибкой связью 3 (рис. 8.в) значения (мм) для передач с резинотканевыми ремнями равны /3/:
![]() ,
(4.1)
,
(4.1)
где
![]() -
вращающий момент на валу малого шкива
(н.м.).
-
вращающий момент на валу малого шкива
(н.м.).
Для синтетических ремней эта зависимость дает завышенные результаты. По этому при расчете рекомендуется предварительно выбрать толщину ремня =0,5 мм или =0,7 мм и диаметр определить из соотношения Д1 / =60 - 150.
Наименьший размер шкива в таких механизмах РЭС составляет Д1min = 6 – 8 мм. В качестве гибкой связи используют шнуры из шелка, капрона, резины, пластмасс, стальные тросики, ленту, а также плоский, круглый и клиновый ремни.
Минимальное
значение расчетного диаметра меньшего
шкива
![]() (мм)
клиноременных передач определяется из
выражения:
(мм)
клиноременных передач определяется из
выражения:
Д1 ≈ 30∙(T1)1/3, (4.2)
где
![]() -
крутящий момент на ведущем валу (н.м.).
-
крутящий момент на ведущем валу (н.м.).
Диаметр
большего шкива равен
![]() ,
а вычисленные значения округляют до
ближайших стандартных значений: 30; 45;
50; 56; 63; 71; 80; 90; 100; 112; 125; 140; 160; 180; 200 и т.д.
Межосевое расстояние аw
определяется конструктивными требованиями
к ременному приводу и для плоскоременных
передач:
,
а вычисленные значения округляют до
ближайших стандартных значений: 30; 45;
50; 56; 63; 71; 80; 90; 100; 112; 125; 140; 160; 180; 200 и т.д.
Межосевое расстояние аw
определяется конструктивными требованиями
к ременному приводу и для плоскоременных
передач:
аw (1.5 – 2.0)(Д1+ Д1 ) . (4.3)
Коэффициент 1.5 принимают для передач с синтетическими ремнями и 2.0 – для передач с резинотканевыми ремнями. Для клиноременных передач: аw равно
аwmin = 0.55(Д1+ Д2 ) + h (4.4)
аwmax =2(Д1+ Д2 ) (4.5)
Обычно для увеличения долговечности ремня принимают аw аwmin и руководствуются следующей зависимостью:
аw = СД2 (4.6)
где C – числовой коэффициент равный 1.5 для передаточного числа U=1, C=1.2; для U=2, C=1.0, если U=3, C=0.95; для U=4, C=0.9, если U=5 и C=0.35; для U>6.
Расчетная длина ремня Lр стального тросика, ленты, шнура в зависимости от выбранного аw определяется выражением /3/:
Lр = 2 аw + 0.5 ( Д1 + Д2) + 0.25( Д1 - Д2) 2/ аw (4.7)
Угол охвата ведущего шкива 1 равен:
1 = (180 0 – 570)( Д2 – Д1) 2/ аw (4.8)
Значение угла
![]() зависит от тяговой способности и
составляет для передач с резинотканевыми
и синтетическими ремнями 1
1500
и клиноременных
1
1200.
По этому габариты клиноременных передач
существенно меньше.
зависит от тяговой способности и
составляет для передач с резинотканевыми
и синтетическими ремнями 1
1500
и клиноременных
1
1200.
По этому габариты клиноременных передач
существенно меньше.
Достоинством передачи с гибкой связью, в качестве которой используется зубчатый ремень, является отсутствие скольжения. Зубчатый ремень (рис. 4.2) на внутренней поверхности имеет выступы или зубцы, расположенные с шагом Рр; зубцы входят в соответствующие впадины на шкивах.
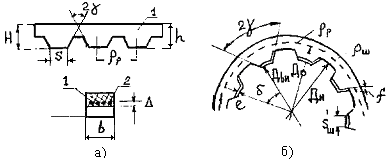
Рис. 4.2. Основные размеры зубчатого ремня (а) и шкива (б)
Ремень состоит из жесткой кольцевой основы в виде тросиков 2 и резиновой массы 1. Согласно отраслевой нормали ОН-6-07-5-83, ремень характеризуется модулем m = Рр/π, общей толщиной Н, высотой зуба h, шириной В, углом 2γ=50° и толщиной S зуба. Стальные тросики диаметром d = 0.3 ÷ 0,75 мм размещают с шагом 1 ÷ 1,2 мм на расстоянии Δ от основания ремня. Число зубьев ремня берется равным 32, 36, 40, 45, 50, 56, 64, 71, 80, 90, 100, 112, 125, 140, 160. Рекомендуемые значения модуля m: в зависимости от передаваемой мощности Р имеют вид: для P ≤ 0,4 кВт, m = 2 мм или m = 3 мм, для 0,4 ≤ Р ≤ 3,0 кВт, m = 3 мм или m = 4 мм; для Р > 3 кВт, значения m = 4 мм или m = 5 мм.
При расчете размеров зубчатого шкива определяют диаметр начальной окружности Д0, соответствующий положению стальных тросиков в зубчатом ремне, когда ремень находится на шкиве.
Д0 =m·z (4.9)
Минимальное число зубьев на шкиве zmin зависит от
модуля ремня: при m = 2 - 4 мм zmin = 16, при m = 5 мм zmin = 18.
Наружный и внутренний диаметры, а также шаг впадин шкива Pш = Рр (рис. 4.2, б) находят из выражений
Дн = Д0 - 2∆ (4.10)
Двн = Дн - 2·(h) (4.11)
Рш = (π·Дн ) /z= Рр-2πΔ /z (4.12)
![]() ,
(4.13)
,
(4.13)
где δ – угловой шаг впадин шкива.
Радиус округлений зубьев у головки и ножки шкива R = 0,25·m. Ширину основания впадины у шкива S’ш рассчитывают с учетом бокового f = 0,35·m и радиального е ≥ 3·m зазоров, при этом S’ = S - 2·е tgγ +f / cosγ. Передачи с гибкой связью с зацеплением выполняются также и с перфорированной лентой. В таких передачах зубчатые барабаны 1 соединены гибкой 2 перфорированной лентой (рис. 4. 3), которую изготавливают чаще всего из стали.
Минимальный радиус r барабана связан с толщиной δ стальной ленты зависимостью г = 120·δ. Передача с перфорированной лентой широко применяется в принтерах персональных компьютеров.
Передаточное отношение для зубоременных передач и передач с перфорированной лентой определяется выражением (1), где под Д1 и Д2 – понимают диаметры начальных окружностей.
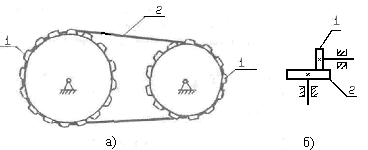
Рис. 4.3. Передача с перфорированной лентой (а) и лобовой вариатор (б)
При последовательном соединении n-фрикционных механизмов передаточное отношение i1n равно произведению передаточных отношений отдельных механизмов.
i1n= i12 i43i65 … in-1,n (4.14)
Если при последовательном соединении фрикционных механизмов диаметры дисков равны D1, D2,… Dn, то передаточное отношение i1n определяется выражением
i1n = ξn∙ D2/D1∙D4/D3…Dn/Dn-1 (4.15)
Для лобового вариатора (рис. 1, б), при перемещении ролика 2, меняется передаточное отношение i12. Один из его основных параметров диапазон регулирования.
Д
=
![]() =D2max/D2min,
(4.16)
=D2max/D2min,
(4.16)
Диапазон регулирования лобового вариатора может изменяться в широких пределах.
Следует учитывать, что фрикционные механизмы с гибкой связью применяются для передачи вращения между валом при больших межосевых расстояниях и для преобразования вращательного движения в прямолинейное, и наоборот. Для передачи вращения (рис. 4.1, в) фрикционные механизмы имеют передаточное число 7÷10, обладают плавным ходом, демпфируют и сглаживают колебания крутящего момента, имеют низкую стоимость, не нуждаются в смазке и работают в широком температурном интервале от – 40 до + 80 °С. Эти особенности обусловливают широкое применение ременных передач в системах автоматики и в персональных компьютерах, приводах магнитофонов и видеомагнитофонов.
Кроме ременной передачи различают механизмы с непосредственными соединениями, когда гибкая связь 3 закреплена каким - либо способом на барабанах или шкивах; (рис. 4.4).
Для фрикционных передач с непосредственными соединениями в качестве гибких связей применяются гибкие стальные тросики: диаметром d = 0,6 - 1,02 мм; капроновые d = 0,3 - 0,8 мм и специальные для радиоприемников d = 0,8 - 1,3 мм или гибкие стальные ленты, для которых применяются высокоуглеродистые и пружинные стали толщиной 0,1; 0,12; 0,15; 0,18; 0,2; 0,22; 0,25; 0,28; 0,3 мм и шириной 4 - 30 мм. Предел прочности при растяжении таких лент 735 - 1175 МПа.
На рис. 4. 4 приведены схемы передач гибкой связью с непосредственными соединениями. Для передачи преобразующей линейное перемещение гибкой связи 3 во вращательное движение ролика 1 (рис. 4.4, а). уравнение движения имеет вид
φ1 = 180 / π(2l /Д + h), (4.17)
где φ1 – угол поворота ролика;
l – поступательное перемещение гибкой связи,
Д – диаметр ролика;
h – толщина или диаметр тросика
Для передачи (рис. 4.4, в) уравнение движения задается формулой
φ2 = φ1(Д 1 + h) / (Д2 + h) (4.18)
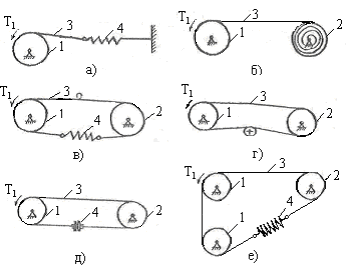
Рис. 4.4. Схемы передач с гибкой связью
Передачи с гибкой связью могут работать как на ускорение, так и на замедление с i12 до 3:1 или 1:3. Необходимым условием работы передачи с гибкой связью является силовое или кинематическое замыкание. Силовое замыкание передач с одной ветвью чаще всего осуществляется с мощью пружин связанных с ведомым звеном.
В кинематических замкнутых передачах натяжение гибкой связи производится пружиной (рис. 4.4, а, в), натяжным роликом (рис. 4.4, г) или винтовой стяжкой (рис. 4.4, д). Шкивы и ролики для передач с гибкими тросиками выполняются с одной круговой и несколькими спиральными канавками. Профиль канавки шкива для увеличения трения обычно делают клиновидным (рис. 4.4, а). Ролики для передач с гибкой лентой выполняют в прямоугольной канавке (рис. 4.4 б). Иногда вместо двух дисков в фрикционной передаче используют три диска (рис. 4.4, е), повышая точность настройки.
Такие виды передач получили широкое применение в конструкциях современных аналово-цифровых приемников в качестве настройки на заданную частоту радиостанции.
4.2. Геометрия цилиндрической зубчатой передачи
В механизмах РЭС
наиболее распространены эвольвентные
зубчатые передачи /4/. Меньшее зубчатое
колесо (
)
называют шестерней, а большое (
)
– колесом. Зацепление зубчатых колес
и
кинематически можно представить как
качение без скольжения двух окружностей
диаметрами
![]() и
и
![]() называемых начальными , для передач без
смещения они совпадают с делительными
и
(рис. 4.4).
называемых начальными , для передач без
смещения они совпадают с делительными
и
(рис. 4.4).
Положение линии
зацепления, т.е. траектории общей точки
контакта зубьев при ее движении
относительно неподвижного звена зубчатой
передачи, определяется углом зацепления
![]() (ГОСТ 16530-70). Окружность зубчатого колеса,
делящуюся при его нарезании на равное
число частей длинной P,
называемых шагами и имеющую стандартный
модуль, называют делительной. Диаметр
такой окружности находят из равенства
(ГОСТ 16530-70). Окружность зубчатого колеса,
делящуюся при его нарезании на равное
число частей длинной P,
называемых шагами и имеющую стандартный
модуль, называют делительной. Диаметр
такой окружности находят из равенства