Материал: Проектирование механизмов радиоэлектронных средств. учебное пособие. Андреев А.И., Андреев И.В
движения от передаточных механизмов
Какие существуют основные типы рычажных
механизмов?
Для чего предназначены мальтийские механизмы и
какие звенья определяют структуру этих механизмов?
Охарактеризуйте назначение реечной передачи и ее
применение в современных конструкциях РЭС.
Какие существуют основные типы фрикционных
механизмов РЭС?
В чем различие простой и сложной зубчатых передач?
Для синусного механизма кинематические характеристики имеют вид:
( ) = rsin (3.7)
- угол поворота
![]() (3.8)
(3.8)
![]() (3.9)
(3.9)
В случае тангенсного механизма эти характеристики имеют вид
![]() (3.10)
(3.10)
- угол поворота
![]() (3.11)
(3.11)
![]() (3.12)
(3.12)
Для
кривошипно-ползунного механизма функция
положения
![]() и первая передаточная характеристика
имеют вид
и первая передаточная характеристика
имеют вид
![]() (3.13)
(3.13)
 (3.14)
(3.14)
Вторая
передаточная функция представляет
производную от
![]() для такого механизма:
для такого механизма:

 (3.15)
(3.15)
Для
большинства рычажных и кулачковых
механизмов функции положения и
передаточные характеристики являются
нелинейными функциями, поэтому эти
механизмы используют в качестве
исполнительных. Для цилиндрических
зубчатых передач и фрикционных механизмов
функция положения и передаточные
характеристики
и
являются наоборот линейными функциями.
Поэтому эти механизмы используются
часто в промежуточных звеньях и выступают
в качестве передаточных механизмов.
Для фрикционных и зубчатых механизмов
функция положения
![]() равна
равна
![]() (3.16)
(3.16)
![]() -
постоянные; где
-
угол поворота, равный
.
-
постоянные; где
-
угол поворота, равный
.
Первая и вторая передаточная функции равны
![]() (3.17)
(3.17)
![]() (3.18)
(3.18)
Кинематический
расчет таких механизмов включает
определение передаточного отношения
![]() и нахождения передаточного числа
и нахождения передаточного числа
![]() .
.
Для фрикционных передач передаточное отношение с учетом упругого скольжения равно
![]() ,
(3.19)
,
(3.19)
где
![]() и
и
![]() -
диаметры ведущего и ведомого дисков;
-
диаметры ведущего и ведомого дисков;
![]() и
и
![]() -
угловые скорости вращения этих дисков;
-
угловые скорости вращения этих дисков;
![]() - коэффициент,
учитывающий скольжение и
- коэффициент,
учитывающий скольжение и
зависящий от модуля упругости материала, шероховатости
поверхности, наличия смазки и условий эксплуатации.
В зубчатых передачах
роль диаметров фрикционных катков
играют делительные диаметры
![]() и
и
![]() ,
так называемых начальных окружностей,
находящихся в зацеплении зубчатых
колес.
,
так называемых начальных окружностей,
находящихся в зацеплении зубчатых
колес.
Точки касания этих
окружностей имеют одинаковую скорость
![]() .
.
Тогда передаточное отношение зубчатой передачи, состоящей из двух колес, равно:
![]() ,
(3.20)
,
(3.20)
где
знак минус относится к внешнему, а знак
плюс – к внутреннему зацеплению;
![]() и
и
![]() - число зубьев второго и первого колес..
- число зубьев второго и первого колес..
Для червячной
передачи передаточное отношение
![]() равно /3/ равно делению числа зубьев
червячного колеса
на число заходов червяка
равно /3/ равно делению числа зубьев
червячного колеса
на число заходов червяка
![]() (3.21)
(3.21)
Таким же образом определяется передаточное отношение для конической и винтовой зубчатых передач, где - число зубьев ведомого колеса, - число зубьев ведущего колеса. Эти зубчатые механизмы изменяют плоскость вращения колес и передаточное отношение.
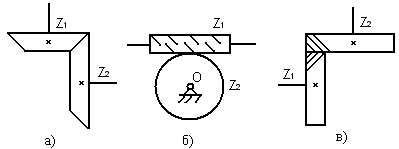
Рис. 3.1. Коническая (а), червячная (б) и винтовая (в) зубчатые передачи
В многоступенчатой цилиндрической зубчатой передаче с последовательным соединением зубчатых колес (рис. 3.2 а) передаточное отношение равно:
![]() ,
(3.22)
,
(3.22)
где
k-
число пар сопряжения колес внешнего
касания (зацепления);
![]() -
число зубьев последнего n
– го колеса;
-
число зубьев первого колеса.
-
число зубьев последнего n
– го колеса;
-
число зубьев первого колеса.
Промежуточные колеса не влияют на величину передаточного отношения и получили название передаточных.
Назначение паразитных колес сводится к изменению направления вращения ведомого звена механизма, а также к уменьшению габаритов последнего при значительных межосевых расстояниях.
Для механизмов со ступенчатым соединением колес (рис. 3.2 б) на каждом промежуточном валу закреплено по два колеса, а на ведущем и ведомом валах – по одному.
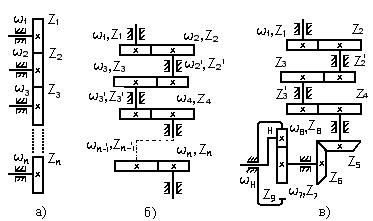
Рис. 3.2. Последовательное (а), ступенчатое (б) соединения колес и смешанное с последовательным соединением
ступенчатой, конической и планетарной передач (в)
Передаточное
отношение такого механизма с учетом
того, что
![]() и
и
![]() определяется выражением:
определяется выражением:
![]() (3.23)
(3.23)
Или в общем случае n – колес:
![]() ,
(3.24)
,
(3.24)
где k – число пар сопряженных колес внешнего касания
(зацепления);
![]() -
число зубьев соответствующих колес.
-
число зубьев соответствующих колес.
Рассмотренное соединение колес позволяет реализовать большое передаточное отношение. При определении передаточного отношения планетарной передачи (рис.3.2 в) применим метод обращения движения (метод Виллиса), сообщим всей системе вращение с угловой скоростью минус ώн (ώн – угловая скорость водила Н). Тогда водило оказывается неподвижным, а передача превращается в соосный зубчатый механизм с неподвижными осями или обращенный механизм. Угловые скорости и исходного механизма: колесо 7 имеет угловую скорость ώ7, водило - ώн, колесо 9 ώ9 = 0. Обращенный механизм имеет угловые скорости: колесо7 - ώ7 (н) = ώ7 - ώн , колесо 9 - ώ9 (н) = - ώн, водило ώн = 0. Причем верхний индекс в скобках указывает неподвижное звено. Передаточное отношение обращенного механизма от звена 7 к звену 9 равно
i79 (н)= ώ7 (н) / ώ9 (н) =( ώ7 - ώн )/ (- ώн ) = - ώ7 /ώ9 + 1 = - i7н (9) +1.
Следовательно, искомое передаточное отношение от центрального колеса 7 к водилу Н определяется формулой
i7н (9) = 1 - i79 (н) . (3.25)
Передаточное отношение в обратном направлении
iн7 (9) = ( i7н (9) )-1 = (1 - i79 (н) )-1 . (3.26)
При расчете передаточного отношения -i79 (н) обращенного механизма с неподвижными в пространстве осями нужно учитывать знак передаточного отношения . Так как в рассматриваемой передаче одно зацепление внешнее, а другое внутреннее, то в соответствии с формулой (3.20) имеем
i79 (н) = i78 (н) ∙ i89 (н) = (- Z8 / Z7 ) (+ Z9 / Z8 )
Следовательно, передаточное отношение планетарной передачи равно
i7н (9) = 1 + (Z8 / Z7 ) (Z9 / Z8 ) = 1 + Z9 / Z7 (3.27)