Материал: Проектирование механизмов радиоэлектронных средств. учебное пособие. Андреев А.И., Андреев И.В
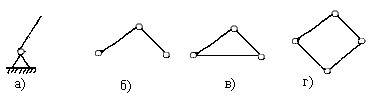
Рис. 1.7. Схема к определению класса контура: а) - 1- й класс, б) – 2-й класс, в) – 3-й класс, г) – 4-й класс
Номер класса группы равен числу кинематических пар, входящих в замкнутый контур, образованный внутренними кинематическими парами, за исключением двухповодковой группы, которая условно относится ко второму классу.
Класс и порядок механизма зависят от того, какое звено является ведущим.
Принцип наслоения структурных групп распространяется на механизмы, звенья которых представляют твердые тела.
Структурная группа плоских механизмов может быть отражена формулой (1.4), если W = 0 .
Основные задачи структурного анализа механизмов включают в себя : определение количества свобод движения механизмов в зависимости от геометрических форм сопряжения звеньев и их числа, разделение механизма на структурные группы, обеспечения заданных форм траекторий движения точек звеньев в соответствии с требованиями технологии производства и эксплуатации
Таким образом, наиболее наглядное представление о структуре механизма дает его структурная схема, под которой понимают изображение всей совокупности составляющих злементов, определяющих функции механизма.
Для выполнения схем применяют условные графические обозначения, установленные Единой системой конструкторской документации (ГОСТ 2.791-84).
Более подробное описание структуры механизмов можно найти в работах /1-5/.
Контрольные вопросы
Какие существуют классы кинематических пар и чем они определяются?
Охарактеризуйте основные звенья механизмов по
конструктивным признакам?
Какие существуют типы высших кинематических пар
механизмов и их условные обозначения?
Чем определяется число степеней свободы?
Какие существуют основные виды кинематических
цепей?
Как определяется число условий связи для плоского и
пространственного механизмов?
Чем характеризуется структурный анализ механизмов?
Как определяется число степеней подвижности
пространственной кинематической цепи, если одно из ее звеньев будет неподвихным?
Как определяется класс контура?
Охарактеризуйте метод присоединения структурных
групп Ассура к ведущему звену?
Какие существуют схемы групп различного порядка?
– К какому классу относится пара контакт двух
криволинейных поверхностей и где она используется?
Как определяется число степеней свободы с учетом
избыточных связей?
Поясните формулу Чебышева для определения числа
степеней свободы?
Какие существуют типы низших кинематических пар
механизмов и их условные обозначения?
Сколько число условий связи имеет винтовая и
вращательная кинематические пары и их условные обозначения?
Что понимается под структурным синтезом механизма?
Какие выполняются требования при проектировании
механизма радиоэлектронных средств?
Что называется структурным формулами
кинематических целей?
Сколько степеней подвижности имеет звено и
кинематическая цепь в пространстве?
Какие звенья и кинематические пары входят в состав
механизма винт - гайка?
2. Основные виды механизмов
Исходя из кинематических, конструктивных и функциональных свойств, механизмы подразделяют на рычажные, кулачковые, фрикционные, зубчатые и механизмы прерывистого движения. Рычажными называют механизмы с геометрическим замыканием звеньев во вращательных и поступательных парах /1-5/. К рычажным механизмам относятся кривошипно-ползунный, кулисный, синусный, тангенсный, и пространственно-сферический (рис.2.1).
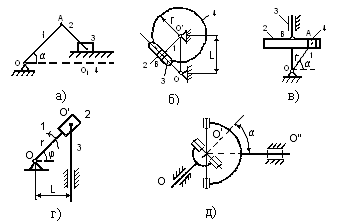
Рис. 2.1. Виды рычажных механизмов
Кривошипно-ползунный
механизм, используемый для преобразования
вращательного движения кривошипа 1
(рис. 2.1.а) в возвратно-поступательное
движение ползуна 3. Ползун и кривошип
соединяются с помощью звена 2, а сам
ползун 3 совершает движение и оказывает
давление на неподвижное звено 4.
Кривошипно-кулисный механизм состоит
из кривошипа 1 (рис. 2.1.б) и кулисы 3,
представляющей собой подвижное
направляющее звено, и звено 2, называемое
кулисным камнем. Если
![]() ,
то вращательное движение кривошипа 1
преобразуется в возвратно-вращательное
движение кулисы 3. Когда
,
то вращательное движение кривошипа 1
преобразуется в возвратно-вращательное
движение кулисы 3. Когда
![]() ,
то при равномерном вращении кривошипа
1 кулиса 3 вращается с переменной угловой
скоростью. Для синусного механизма
(рис. 2.1.в) при вращении кривошипа 1, точка
А кривошипа двигается по окружности
радиусом
,
то при равномерном вращении кривошипа
1 кулиса 3 вращается с переменной угловой
скоростью. Для синусного механизма
(рис. 2.1.в) при вращении кривошипа 1, точка
А кривошипа двигается по окружности
радиусом
![]() .
Ползун 4 синусного механизма шарнирно
соединен с кривошипом и может перемещаться
по направляющей звена 2, которое в свою
очередь, двигается в неподвижной
прямолинейной направляющей 3. Любая
точка звена 2 совершает возвратно-прямолинейное
движение. Для тангенсного механизма
(рис. 2.1 г) при движении кривошипа 1 ползун
3 совершает возвратно-поступательное
движение. Пространственно-сферический
механизм (рис. 2.1 .д) служит для передачи
движения между пересекающимися осями
под углом ,
часто называемый карданной передачей.
Кулачковые механизмы образуются путем
силового замыкания звеньев кулачка 1 и
толкателя (коромысла) 2. Кулачок обычно
представляет собой диск или цилиндр,
профиль которого очерчен определенной
кривой, которая строго задает движение
толкателю (рис. 2.2).
.
Ползун 4 синусного механизма шарнирно
соединен с кривошипом и может перемещаться
по направляющей звена 2, которое в свою
очередь, двигается в неподвижной
прямолинейной направляющей 3. Любая
точка звена 2 совершает возвратно-прямолинейное
движение. Для тангенсного механизма
(рис. 2.1 г) при движении кривошипа 1 ползун
3 совершает возвратно-поступательное
движение. Пространственно-сферический
механизм (рис. 2.1 .д) служит для передачи
движения между пересекающимися осями
под углом ,
часто называемый карданной передачей.
Кулачковые механизмы образуются путем
силового замыкания звеньев кулачка 1 и
толкателя (коромысла) 2. Кулачок обычно
представляет собой диск или цилиндр,
профиль которого очерчен определенной
кривой, которая строго задает движение
толкателю (рис. 2.2).
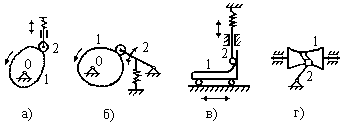
Рис. 2.2. Кулачковые механизмы
В зависимости от вида движения соединенное с кулачком звено называют толкателем (рис. 2.2 а, в). Механизмы используют для преобразования вращательного (рис. 2.2 а, б) или возвратно-поступательного движения (рис. 2.2 в) входного звена в возвратно-поступательное (рис. 2.2 а, в), угловое перемещение (рис 2.2 б) или для движения по сложной пространственной траектории (рис. 2.2 г) выходного звена.
В фрикционных механизмах движение от ведущего звена к ведомому передается за счет сил трения, возникающих в результате контакта этих звеньев. Различают фрикционные передачи с жесткой связью (рис 2.3 а, б) и с гибкими связями (рис. 2.3 в).
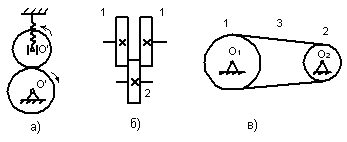
Рис. 2.3. Фрикционные механизмы
Простейшая фрикционная передача состоит из двух цилиндрических дисков 1 и 2 (рис. 2.3 а), один из которых прижимается к другому силой упругости пружины, либо из трех дисков с торцевым зацеплением одного из них (рис. 2.3 б). Фрикционный механизм может быть выполнен и с гибкой связью (рис. 2.3 в) для передачи вращательного движения от одного диска к другому, находящемуся на большом расстоянии. Под гибкой связью понимают прямоугольные, клиновидные и круглые ремни, тросы, нити и ленты.
Зубчатыми называют механизмы, образованные зацеплением выступов или зубов, а передача нагрузки и движения между колесами осуществляется за счет воздействия зубьев друг на друга. В отличие от фрикционной передачи здесь исключено проскакивание звеньев.
Зубчатые механизмы состоят из двух колес (рис. 2.4 а) обеспечивающих внешнее зацепление или из двух колес 1 и 2 и дополнительного звена 3, получившего название водила (рис. 2.4 б), обеспечивающего планетарное движение колеса-сателлита 2. Передача, представленная на рис. 2.4 а, представляет простую зубчатую передачу, а на рис. 2.4 б – сложную планетарную зубчатую передачу. Возможны зубчатые механизмы с внутренним зацеплением колес и планетарные передачи, содержащие до трех колес-сателлитов. Планетарную передачу с гибким сателлитом называют волновой и движение в такой передаче передается за счет «бегущей волны» деформации гибкого колеса. К механизмам прерывистого движения относятся, мальтийский механизм, секторная зубчатая передача, реечная зубчатая передача и храповой механизм.
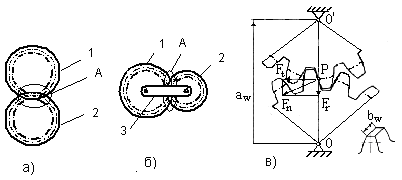
Рис. 2.4. Зубчатые механизмы (а, б) и вид зацепления (в) двух колес
Мальтийские механизмы используют для преобразования непрерывного вращательного движения во вращательное движение с остановками. Такой механизм состоит из мальтийского креста 1 (рис. 2.5 а) и кривошипа 3 с цевкой 2 и фиксатором 4, где ведущим звеном является кривошип с цевкой. Секторный зубчатый механизм состоит ведущего неполнозубого 1 и ведомого полнозубого колеса 2 (рис. 2.5 б).
Храповые механизмы (рис.2.5 в) используют для преобразования вращательного движения во вращательное движение с остановками ведомого звена. Возможно также преобразование возвратно-поступательного движения во вращательное с остановками. Содержат зубчатое колесо 1 и собачку 2. К механизмам прерывистого движения относится реечная зубчатая передача, состоящая из зубчатого колеса 1 и рейки 2 (рис 2.5 г) и осуществляющее движение с остановками.
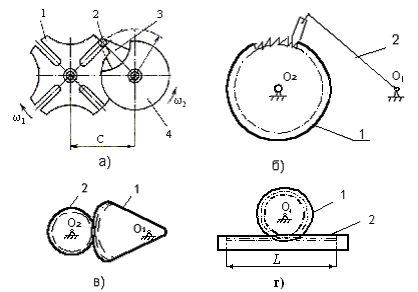
Рис. 2.5. Механизмы прерывистого движения
Реечный механизм служит для преобразования вращательного движения колеса в возвратно-поступательное перемещение рейки.
Данный механизм вместе с зубчатыми передачами и секторным механизмом получили широкое применение в конструкциях современных персональных компьютеров в качестве основных для обеспечения установки и возврата CD- и DVD-дисков и для дальнейшего считывания информации с этих дисков объемом памяти до 4 Гбайт.
Контрольные вопросы
1. Какие существуют основные виды механизмов?
Охарактеризуйте основные звенья рычажных,
кулачковых и фрикционных механизмов?
Какие существуют основные типы кулачковых
механизмов?
Чем определяются различные зубчатые механизмы и
какие звенья образуют кинематические пары?
Какие существуют основные виды механизмов РЭС
прерывистого движения?
В чем различие зубчатых механизмов прерывистого
3. Кинематический расчет механизмов
Аналитические методы исследования кинематики механизмов позволяет определить функциональные зависимости между параметрами движения входных и выходных звеньев.
Кинематический
расчет включает определение функции
положения и передаточных характеристик
механизма. Функцией положения называют
зависимость между координатами
![]()
и
и
![]() соответственно входного и выходного
звеньев.
соответственно входного и выходного
звеньев.
![]() (3.1)
(3.1)
Функция положения – математическое выражение геометрических связей в механизме, обусловливающих определенное преобразование движения. Дифференцируя выражение (3.1) получаем скорость и ускорение выходных звеньев
![]() (3.2)
(3.2)
![]() (3.3)
(3.3)
Входящие
в выражения (3.2) и (3.3) производные
![]() и
и
![]() называются первой и второй передаточными
функциями или аналогами скорости и
ускорения. Они как и функция положения
(3.1) выражают только структурные и
геометрические связи механизма, т.е.
зависят от положения входного звена.
Рассмотрим функции положения отдельных
механизмов и их передаточные характеристики
и
.
Для кулачкового механизма с качающим
толкателем (рис.2.2 б) функция положения
равна
называются первой и второй передаточными
функциями или аналогами скорости и
ускорения. Они как и функция положения
(3.1) выражают только структурные и
геометрические связи механизма, т.е.
зависят от положения входного звена.
Рассмотрим функции положения отдельных
механизмов и их передаточные характеристики
и
.
Для кулачкового механизма с качающим
толкателем (рис.2.2 б) функция положения
равна
![]() ,
(3.4)
,
(3.4)
где
![]() -
угол поворота, равный
-
угол поворота, равный
![]() ,
,
![]() -
постоянная.
-
постоянная.
Передаточные функции равны
![]() (3.5)
(3.5)
![]() (3.6)
(3.6)