Материал: Проект системы контроля дистанции при движении МЗКТ-79221 в колонне
5. Разработка автоматизированной
системы обеспечения безопасности движения МЗКТ-79221 в колонне
Анализ таких систем показывает, что большинство их имеют лазерные датчики. Для лазерного датчика существуют ограничения, которые характерны для всех систем с использованием оптических средств. Иными словами, чувствительность прибора может быть снижена по причине тумана, снега или проливного дождя.
В связи с этим рекомендуется содержать место установки датчика в чистоте и своевременно удалять грязь, лед и снег. Это не совсем приемлемо для специфических условий эксплуатации ВАТ. В этой связи необходима разработка и адаптация для ВАТ радиолокационных систем предотвращения столкновений автомобилей в колонне, действия которых основаны не только на предупреждении водителя о предшествующем столкновении, но и автоматизированном воздействии на механизмы управления автомобиля.
Функциональная схема предлагаемой системы предотвращения столкновений транспортных средств в колонне представлена на рис. 11.
Система содержит:
генератор непрерывных колебаний 1,
модулятор 2,
первый усилитель мощности 3,
сумматор 4,
циркулятор 5,
антенну 6,
смеситель 7,
преобразователь частоты 8,
детектор 9,
регистратор дальности 10,
первый регистратор скорости 11,
второй усилитель мощности 12,
13,
второй регистратор скорости 14,
вычислитель опасного расстояния по дальности, путевой скорости и скорости сближения 15,
первую 16, вторую 17 и третью 18 исполнительные схемы,
схему 19 управления положением антенны
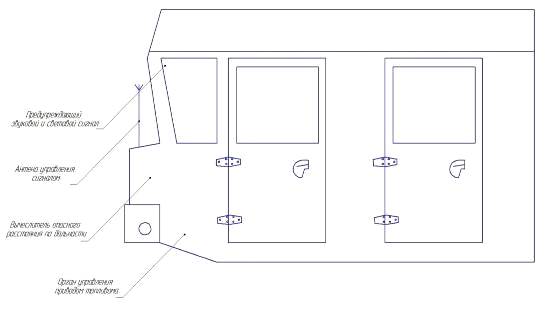
Рисунок 11.Расположение органов системы контроля
дистанции.
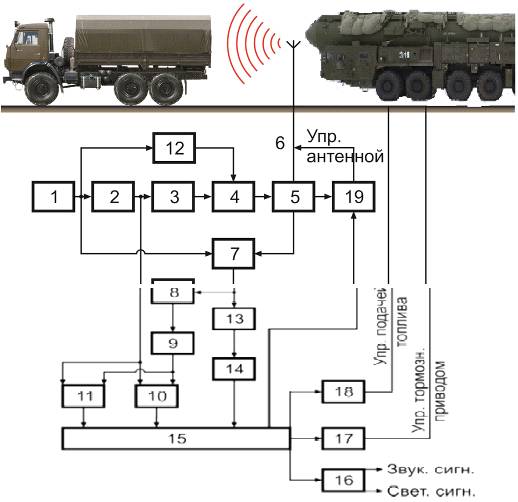
Рисунок. 12 Функциональная схема системы
предотвращения столкновений МЗКТ-79221 в колонне.
Измерение дальности до препятствия и скорости сближения с ним после смесителя 7 осуществляется преобразователем частоты 8, с выхода которого сигнал, преобразуясь в детекторе 9, поступает на первые входы регистратора дальности 10 и первого регистратора скорости 11, на вторые входы которых поступают радиоимпульсы, сформированные в модуляторе 2.Первый регистратор скорости 11 выдает информацию на третий вход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения 15, в котором скорость сближения автомобиля с препятствием вычисляется как скорость изменения приращения дальности по времени, так что
![]()
![]() (1)
(1)
где dR - приращение дальности, м;
С регистратора 10 сигнал поступает
на второй вход вычислителя 15 опасного расстояния по дальности, путевой
скорости и скорости сближения. Оценка путевой скорости осуществляется
выделением сигнала, сформированного после смесителя 7, затем фильтром
доплеровских частот 13, при помощи второго регистратора скорости 14. Численно
величина путевой скорости движения автомобиля прямо пропорциональна
доплеровской частоте и при определенной длине волны радиосигнала, и угле
облучения антенной дорожного покрытия находится по зависимости
![]()
![]() (2)
(2)
Где: υaм - путевая скорость движения автомобиля, м/с;
Fд - круговая частота с учетом эффекта Доплера, с-1;
λ - длина волны радиосигнала, м;
α - угол облучения антенной дорожного покрытия, град.
Таким образом, с выхода второго регистратора скорости 14 сигнал поступает на первый вход вычислителя 15 опасного расстояния по дальности, путевой скорости и скорости сближения, на второй его вход сигнал поступает с выхода регистратора скорости 10 и на третий его вход сигнал поступает с выхода первого регистратора скорости 11, а с выхода вычислителя 15 подается команда на исполнительную схему, например звуковую и световую индикацию.
Вычислитель 15 опасного расстояния по дальности, путевой скорости и скорости сближения производит вычисления и на его выходе появляется сигнал-команда при достижении опасного расстояния Rтop, т.е. между автомобилем и впереди находящимся препятствием (движущимся или неподвижным), при этом производится анализ трех текущих значений:
путевой скорости движения автомобиля (относительно опорной поверхности) - vaм;
скорости сближения с препятствием vсбл;
текущей дальности до препятствия Rтек.
Критические значения этих величин оцениваются при ситуациях:
автомобиль движется в сторону неподвижного или встречно движущегося препятствия;
автомобиль движется в потоке, в котором все транспортные средства движутся в одну сторону с одинаковой скоростью;
автомобиль движется в потоке, в котором часть транспортных средств движется в противоположную сторону.
При движении автомобиля в
направлении на неподвижное препятствие или на препятствие движущееся встречно
расчет опасного расстояния производится по классической формуле:
![]()
![]() (3)
(3)
Где: Rтop1 - величина опасного расстояния, м;
t1 - время срабатывания тормозного привода, с;
t2 - время нарастания ускорения, с; φ - коэффициент сцепления шин с опорной поверхностью;
i - величина уклона дороги;
Кэ - коэффициент эксплуатационных условий торможения с²/м.
При использовании для расчетов вычислительной техники коэффициенты, характеризующие состояние тормозной системы автомобиля и дорожного покрытия, могут устанавливаться программно.
При движении автомобиля в потоке, в
котором все транспортные средства движутся в одну сторону, скорость
относительного сближения двух движущихся транспортных средств может быть равна
нулю (vсбл = 0), но расстояние Rтор2, на
котором необходимо выдать команду об опасном расстоянии, должно быть не ниже
значения ΔR, которое
зависит как от величин путевой скорости автомобиля vaм, так и
от времени реакции водителя автомобиля:
![]()
![]() (4)
(4)
где tвод - время реакции водителя, с.
Тогда общий тормозной путь может быть
найден по формуле:
![]()
![]() (5)
(5)
Следовательно, вычислитель 15 опасного расстояния по дальности, путевой скорости и скорости сближения выдает исполнительную команду по результатам вычислений совместных величин: текущей дальности до препятствия Rтек, скорости сближения с препятствием vсбл и путевой скорости автомобиля vaм только в случае достижения критического состояния этих величин, при которых возможно опасное столкновение как с подвижным, так и неподвижным препятствием.
Применение схемы 19 управления положением антенны позволяет изменить угол, под которым производится излучение при наличии встречно движущегося транспортного средства, снабженного подобным устройством. Это позволяет снизить взаимные помехи, создаваемые радарами.
В случае, если водитель не успел среагировать на предупреждающий звуковой и световой сигнал, вырабатываемый схемой 16, что идентифицируется в вычислителе 15 по определяемым величинам текущей дальности до препятствия Rтек, скорости сближения с препятствием vсбл и путевой скорости автомобиля vaм, когда значение этих величин после достижения критических состояний, при которых возможно столкновение как с подвижным, так и неподвижным препятствием по истечении 0,8 секунд (время реакции среднестатистического водителя) не изменяется до безопасного состояния, тогда схема 17 автоматически воздействует на орган управления подачей топлива, переводя автомобиль в режим торможения двигателем, а схема 18 одновременно - на орган управления давлением в тормозном приводе, переводя автомобиль в режим торможения рабочей тормозной системой.
В результате достигается снижение вероятности столкновения транспортного средства при интенсивном сближении с препятствием за счет свето-звуковой индикации, предупреждающей о достижении опасной дистанции и непосредственного автоматического воздействия на подачу топлива и тормозную систему транспортного средства при создании аварийной ситуации.
6. Экономическая часть
.1 Расчет стоимости разработки
В расчете стоимости программного продукта определяется предполагаемая рыночная цена.
Цена - это количество денег (или других товаров, услуг), уплачиваемое за единицу товара. Купля-продажа есть признание обществом его общественной ценностью. Цена выступает главным ориентиром поведения предприятия на рынке, от нее зависит, какие издержки будут возмещены в процессе реализации товаров, какие нет, каковы будут доходы предпринимателей, в какие отрасли будут направлены капиталы и т.д.
Возможная цена продукта складывается из себестоимости продукта, которая составит минимальную цену, включая издержки производства и прибыли.
Издержки - это денежное выражение затрат производственных факторов. Величина этих затрат зависит от цен на ресурсы, а также от технологии их использования.
Цена определяется складывающимся спросом и предложением на ресурсы. На формирование цены оказывают влияние внутренние и внешние факторы, такие как потребители, рыночная среда, государство, издержки на сырье, материалы, рабочая сила, реклама.
Предполагаемая цена разработки Цр
продукта рассчитывается по формуле:
Цр=С+П (6)
Где: С - себестоимость разработки;
П - планируемая прибыль.
6.2 Расчет амортизации основных
фондов
Амортизация - это процесс постепенного перенесения стоимости основных фондов по мере их износа на производимые работы, и накопление финансовых ресурсов в денежной форме в целях последующего воспроизводства основных фондов. Размер амортизационных отчислений определяется на основе норм амортизационных отчислений и положения о порядке планирования и использования начислений.
Расчет амортизационных отчислений
АО, руб. производится по формуле
![]() , (7)
, (7)
Где: n - количество основных фондов;
![]() - балансовая стоимость, руб.;
- балансовая стоимость, руб.;
Na - норма амортизации, %.
Пример расчета амортизационных отчислений для системы контроля дистанции:
![]() (8)
(8)
Таблица 4. Расчет амортизационных отчислений
|
Наименование оборудования |
Кол-во |
Балансовая стоимость, руб. |
|
преобразователь частоты |
1 |
1700 |
|
детектор |
1 |
1800 |
|
усилитель мощности |
1 |
2828 |
|
регистратор дальности |
1 |
3410 |
|
регистратор скорости |
1 |
3250 |
|
антенна |
1 |
2100 |
|
вычислитель опасного расстояния по дальности, путевой скорости и скорости сближения |
1 |
2895 |
|
Итого |
6 |
17983 |
|
Всего |
6 |
17983 |
6.3 Расчет стоимости материалов
Расчет расхода затрат на материалы осуществляется по нормам расхода материалов на 1 час работы технологического оборудования, которые принимаются по данным действующих предприятий.
Стоимость единицы материалов устанавливается по прейскуранту оптовых цен с учетом транспортных и заготовительно-складских расходов.
Стоимость детали Зм руб. определяется
по формуле
![]() , (9)
, (9)
Где: ![]() - годовой расход материалов;
- годовой расход материалов;
![]() - цена за единицу, руб.
- цена за единицу, руб.
Пример расчетов для систеиы контроля дистанции
![]() (10)
(10)
.4 Расчет себестоимости
Себестоимость продукта Сп,
руб. определяется по формуле:
Сп = Фот + Стр.взн
+ АО + Зм + Зпр, (11)
Где: Фот - фонд заработной платы, руб.;
Стр.взн - отчисления по страховым взносам, руб.;
АО - амортизационные отчисления, руб.;
Зм -затраты на детали, руб.;
Зпр - прочие затраты, руб.
Сп =1700+1800+2828+3410+3250+2100+2895=17983руб.
6.5 Экономическая эффективность
Для оценки уровня эффективности работы предприятия получаемый результат сопоставляется с затратами или используемыми ресурсами.
Наши расчеты показали, что затраты на создание системы контроля дистанции составили 17983рублей.
Проанализировав рынок можно сделать вывод, что системы контроля дистанции на рынке стоят в диапазоне от 12000 до 20000 рублей. За счет эксклюзивности нашего продукта, затраты на создание данной системы могут быть оправданы в связи с повышением боевой готовности войск.
7. Охрана труда и окружающей среды
.1 Общая характеристика организации
работы по охране труда
Должностные лица, виновные в нарушении правил и норм охраны труда могут привлекаться к дисциплинарной, административной, материальной и уголовной ответственности.
Дисциплинарная ответственность предусматривает наложений взысканий на должностных лиц из числа руководящих, административно-технических и административно-хозяйственных В/С. К взысканиям относятся замечания, выговоры, строгие выговоры, переводы на нижеоплачиваемую должность на срок до 1 года, увольнения со службы.
Административная ответственность выражается в наложении денежных штрафов за нарушения, не содержащие уголовного преступления. Штраф взыскивается согласно из дисциплинарного устава ВС..
Материальная ответственность наступает в тех случаях, когда в результате нарушения причиняется вред личности или имуществу граждан. Выражается материальная ответственность в возмещении виновным полностью или частично денежных сумм. Возмещение ущерба потерпевшему определяется правилами возмещения предприятиями, учреждениями, организациями ущерба, причиненного рабочим и служащим увечьем.
Уголовная ответственность возникает в результате грубого нарушения должностными лицами трудового законодательства, а также правил и норм охраны труда. Устанавливается уголовная ответственность уголовными кодексами (УК). Например, нарушения, повлекшие за собой причинение телесных повреждений или утрату трудоспособности, наказываются лишением свободы на срок до 3 лет или исправительными работами на срок до 2 лет, а повлекшие смерть человека - до 5 лет.