Материал: Проект системы контроля дистанции при движении МЗКТ-79221 в колонне
.3 Применение радаров
Целесообразность использования автомобильных радаров для предупреждения столкновений признана в ведущих автомобильных державах где такие устройства появились впервые.
Применение автомобильных радаров имеет большое значение для предотвращения ДТП при следующих условиях:
) Плотный туман;
) Интенсивный дождь или снегопад;
) Сильное задымление атмосферы;
) Ослепление водителя солнечными лучами или фарами.
Радарный датчик - основная часть адаптивного круиз-контроля
Автомобильный радарный датчик может быть эффективно использован и в следующих дорожных ситуациях:
) Предупреждение попутных столкновений при смене полосы движения, а также попутных наездов на мотоциклистов, велосипедистов и пешеходов.
) Обнаружение автомашин в так называемых "мертвых зонах", которые не удается контролировать с помощью боковых зеркал. Типовая ближняя зона, контролируемая радаром, - 5-15 м вдоль автомобиля.
) Предупреждение наездов на впереди идущую машину на улицах крупных городов при плотном потоке автомобилей и частых остановках из-за заторов или переключений светофоров. Радар позволяет системе управления зафиксировать факт торможения впереди идущего автомобиля за время, равное 0,1 с от начала торможения, то есть практически мгновенно, или зафиксировать сближение с препятствием на опасное расстояние. Типовая зона, контролируемая радаром, - 20-30 м по ходу движения автомобиля.
) Предупреждение о встречных автомобилях на загородных автодорогах, в первую очередь о скоростных автомобилях и мотоциклах, а также о транспорте, появляющемся из-за поворота дороги. Типовая зона, контролируемая радаром, - до 150 м по ходу движения автомобиля. Специалисты компании Mercedes-Benz считают, что большинство встречных столкновений можно предупредить путем оповещения водителя об опасности даже за 1 секунду до столкновения.
) Предупреждение об опасности наезда на пешеходов, автомобили, ограждения при движении задним ходом. Типовая контролируемая зона - от 0 до 10-15 м в заднем секторе. Эта задача особенно актуальна для большегрузных автомобилей и фургонов, так как задний сектор часто не просматривается водителем из-за конструкции машины.
) Использование радаров значительно уменьшает риск ДТП с участием нескольких автомобилей ("цепные" столкновения) на скоростных участках дорог.
) Особое значение имеет использование радарных датчиков на транспорте с опасными грузами и на автобусах. Установка радаров на автобусы и, как следствие, снижение вероятности возникновения ДТП имеют большое социальное значение, так как в авариях с автобусами может пострадать большое число людей.
) Новое применение радаров относится к системам автоматической парковки.
.4 Радарные системы оповещения об
опасном нарушении дистанции безопасности при движении в колонне
Системы адаптивного круиз-контроля (далее АКК) являются системами переднего обзора. Система АКК поддерживает безопасную дистанцию до впереди идущего автомобиля, автоматически регулируя скорость. В целом, большинство систем АКК используют одни и те же устройства для контроля скорости. Основная их часть - это радарный датчик, определяющий расстояние между машиной и другими транспортными средствами, находящимися на дороге.
Радарный датчик может быть соединен с тормозной системой, сцеплением, мотором, системой контроля устойчивости и трансмиссией. Так же, как и классические системы контроля скорости, система АКК поддерживает скорость автомобиля на заранее установленном уровне до тех пор, пока путь свободен и ничто не препятствует движению. Модуль контроля использует информацию, получаемую от радарного датчика, датчиков скорости машины и рулевого управления. Если перед машиной появился объект, система автоматически регулирует скорость для поддержания заранее установленного расстояния между машинами.
Радар может быть как самостоятельным устройством, так и интегрированной частью модуля системного контроля машины. Для обеспечения эффективной работы радар должен находиться в передней части машины, именно там, куда при фронтальном столкновении может быть нанесен самый мощный удар. Радар может быть установлен в переднем бампере или под решеткой на радиаторе.
Когда радар неисправен и требуется его замена,
точная настройка и установка датчиков - залог для исправной работы всей
системы. В некоторых моделях включена также опция самонастройки устройства. В
этом случае машина должна проехать по пустой дороге мимо стационарных объектов
(столбов, дорожных знаков, деревьев и т. п.). Чем больше стационарных объектов
находится на дороге, тем быстрее произойдет внутренняя настройка системы. При
значительных повреждениях радара требуется ручная установка с применением
специального лазерного оборудования. Позиционирование горизонтальных и
вертикальных настроечных винтов на задней панели радара отлаживается в
соответствии с показаниями лазерной диагностики.
Таблица 3. Сравнение технологий при различных погодных условиях
|
Погодные условия |
Радарный датчик |
Зеркало |
Видеосигнал |
Ультразвук |
Лазер |
Антенна |
|
Дневной свет |
+ |
+ |
+ |
+ |
+ |
+ |
|
Слепящее солнце |
+ |
+/- |
+/- |
+ |
+/- |
+ |
|
Темнота |
+ |
_ |
_ |
+ |
+ |
+ |
|
Грязь и слякоть |
+ |
+/- |
+/- |
_ |
+/- |
+ |
|
Дождь, снег |
+ |
+/- |
+/- |
_ |
_ |
+ |
Как видно из таблицы 1, применение микроволной технологии дает значительно более универсальные и качественные результаты. Именно радар предотвращения столкновений является всепогодным устройством, но требует более частого ухода в отличие от антенного. Тем не менее, для создания электронных систем безопасности должны быть приняты во внимание и другие технологии, уже успешно зарекомендовавшие себя на рынке.
.5 Конструкция системы
круиз-контроль предлагаемая на отечественные автомобили
Далее будет рассмотрена конструкция системы круиз-контроля, которая предлагается для установки на отечественные автомобили. В конструкцию входят электронный блок управления, датчики, исполнительный механизм и пульт управления. Как и в других электронных системах, руководит ее работой электронный блок управления (ЭБУ). Включив систему, водитель задает требуемые параметры движения автомобиля и далее уже компьютер осуществляет анализ информации, которая непрерывно поступает от датчика скорости движения или частоты вращения коленчатого вала двигателя. После обработки полученной информации "центр управления" выдает команды исполнительному механизму, назначение которого - управлять дроссельной заслонкой, т.е. устанавливать необходимые обороты двигателя. Исполнительный механизм может быть двух типов: вакуумный или с электродвигателем. Принцип работы первого - вакуумного - базируется на использовании разрежения во впускном коллекторе. Подключают его к трубопроводу, идущему к вакуумному регулятору системы зажигания, при этом какого-либо влияния на работу системы зажигания такой отбор давления (разрежения) не оказывает. Работает механизм аналогично вакуумному корректору угла опережения зажигания - создаваемое разрежение в одной полости механизма вытягивает диафрагму, которая связана с тросом привода дроссельной заслонки. Разрежение используется не постоянно, а только когда появляется надобность изменить положение дроссельной заслонки. Управление вакуумным приводом осуществляется с помощью электромагнитного клапана, который регулирует давление (разрежение) в диафрагменной полости. При выключении системы круиз-контроль давление в диафрагменных полостях с помощью электро клапана выравнивается с атмосферным, за счет чего не создается помех управлению дроссельной заслонкой в "ручном" режиме. В другой конструкции исполнительного механизма - с электродвигателем - тяговое усилие на перемещение троса газа создается электродвигателем. Команды на электроклапан или электродвигатель поступают от блока управления. Датчики, дающие информацию блоку управления, по назначению можно разделить на два типа: основные и вспомогательные. Основные датчики непрерывно информируют блок управления о скорости движения или режиме работы двигателя. В зависимости от типа электрооборудования автомобиля они могут устанавливаться в различных местах. Показания скорости можно "снимать" путем установки специального переходника на трос спидометра. Если же эти данные поступают прямо с катушки зажигания или прерывателя, то автоматика будет регулировать уже не скорость, а обороты двигателя, от постоянства которых напрямую зависит и поддержание заданной скорости. Вспомогательные датчики-выключатели подключаются к педалям тормоза, сцепления. Их назначение - отключать систему круиз-контроль при экстренном переходе в ручной режим управления.
Управляется система круиз-контроль с помощью одной ручки с несколькими кнопками. После того, как питание системы включено, можно фиксировать текущую скорость автомобиля, кратковременно нажав на кнопку "запоминание скорости". После этого скорость будет поддерживаться автоматически, и водитель может снять ногу с педали газа. Если скорость необходимо уменьшить или увеличить, можно воспользоваться тормозом или педалью газа и снова нажать на ту же кнопку - автомобиль будет ехать с новой скоростью. Можно изменить скорость и иначе. Если удерживать кнопку "запоминания скорости" нажатой, то скорость начнет плавно уменьшаться. Для увеличения скорости используют другую кнопку - "восстановление": при её удержании скорость будет плавно нарастать. Название кнопки "восстановление" объясняется следующим. "Электронный мозг" запоминает скорость автомобиля, и он помнит ее даже после ее отключения, нажав на тормоз (или сцепление в машинах с ручной КПП). После торможения вернуться к прежней скорости движения можно - нажав кнопку "восстановление". Во многих системах данного типа есть также и функция дискретного изменения скорости. Короткое нажатие одной из кнопок ведет к увеличению скорости автомобиля, а другой - к уменьшению на 1 мил/час или на 1,6 км/ч.
Круиз-контроль может устанавливаться на автомобили, как с бензиновыми, так и с дизельными двигателями. На многих автомобилях наиболее эффективно система работает в интервале скорости от 60 до 160 км/ч независимо от вида трансмиссии, при более низких скоростях появляются колебания оборотов двигателя, из-за чего автомобиль "дергается". У некоторых таких систем скоростные ограничения заложены в программу управления, при этом ниже определенной скорости, например, 30 км/ч, система автоматического поддержания скорости не включается. Выключение системы происходит в нескольких случаях: при нажатии педали тормоза или сцепления и при выключении питания или "массы".
4. Анализ движения автомобильной техники в различных условиях
.1 Движение машин в составе колонн
При движении машин в колонне из числа офицеров, прапорщиков назначается старший колонны. Он несёт ответственность за соблюдением водителями Правил дорожного движения, а также дисциплины и мер безопасности всем личным составом, находящихся в машинах.
Скорость движения колонны устанавливается в соответствии с требованиями уставов и выполняемой задачей. Она определяется режимом движения головной машины. Дистанции между машинами устанавливаются старшим и, как правило, должны быть в метрах равны численному значению скорости движения в километрах в час (например, при скорости движения 30 км\ч дистанция между машинами должна быть 30 м).
При совершении марша ночью скорость движения, дистанция между машинами и режим светомаскировки устанавливаются старшими колоны с учетом обстановки. При этом, как правило, скорость движения снижается, дистанции между машинами уменьшается, при остановке на дороге голова и хвост колонны обозначаются хорошо видными световыми сигналами.
При угрозе и нападении воздушного противника скорость движения и дистанция между машинами увеличивается. Если позволяет обстановка, машины отводятся с дороги, рассредоточиваются с учетом защитных свойств местности и укрываются. Зоны заражения на маршрутах движения обычно обходятся, а при невозможности обхода - преодолеваются на максимальной скорости, по кратчайшему направлению и увеличенных дистанциях, исключающих взаимное запыление машин. Люки машин, жалюзи, боковые и ветровые стекла закрываются, грузы укрываются, личный состав применяет средства индивидуальной защиты. Остановившиеся на зараженном участке машины объезжаются с подветренной стороны.
Во время движения машин в колоне водители и старшие машин обязаны следить за подаваемыми по колоне сигналами и немедленно их выполнять. Всякое изменения порядка движения, а также остановки колоны делаются только по команде старшего колонны.
При остановке колонны машины останавливаются на правой обочине или за пределами дороги в порядке, принятом для движения колонны, на установленной командиром дистанции, но не менее 10 м между машинами.
Остановка отдельных машин не должна задерживать движения колонны. При вынужденной остановке водитель подает установленный сигнал и ставит машину на правую обочину. Первая из следующих в колонне за остановившейся машина, берет неисправную машину на буксир и продолжает движение. При этом остальные машины движения не замедляют. Водители остановившихся машин снова занимают свое место в колонне только на привалах или остановках с разрешения старшего колонны. Обгон движущейся колонны запрещается.
На пересеченной местности дистанции выбираются с расчетом обеспечения наивыгоднейшего режима движения и возможности использования разгона для преодоления подъемов.
.2 Вождение машин в тумане
При движении машин в тумане и в условиях большой запыленности воздуха соблюдаются следующие правила:
снижается скорость движения.
дистанции между машинами при движении в тумане сокращаются, при движении в условиях большой запыленности воздуха увеличиваются.
категорически запрещается обгон транспорта и выезд на середину дороги.
в движении и на стоянках включаются внешние световые приборы.
В движении при необходимости подаются звуковые сигналы.
4.3 Способ обеспечения активной безопасности транспортных средств при движении в колонне
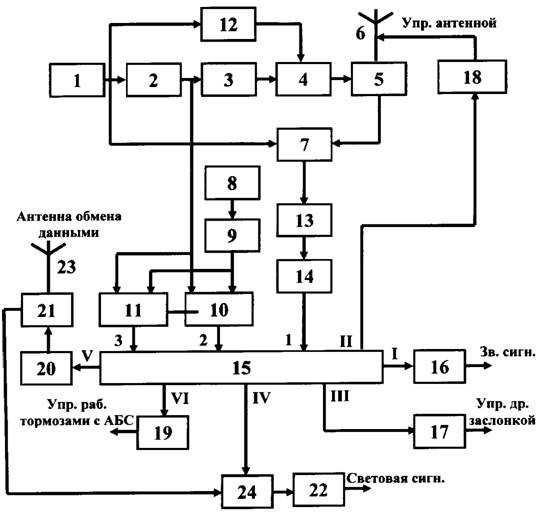
Рисунок 10. Обеспечение безопасности
транспортных средств при движении в колонне.
Изобретение относится к транспортной технике, в частности к системам предупреждения столкновения автомобиля при движении в транспортном потоке. Способ обеспечения активной безопасности транспортных средств при движении в колонне предусматривает наличие системы, которая содержит две антенны, два модулятора, два усилителя мощности, смеситель, преобразователь частоты, детектор, первый и второй регистраторы скорости, регистратор дальности, вычислитель опасного расстояния по дальности, путевой скорости и скорости сближения, генератор непрерывных колебаний, сумматор, циркулятор, фильтр доплеровских частот, сравнитель. Система содержит схему управления положением антенны, первую исполнительную схему, выход которой соединен с источником звука, вторую исполнительную схему, выход которой связан с дроссельной заслонкой, третью исполнительную схему, выход которой соединен с блоком управления антиблокировочной системы рабочей тормозной системы транспортного средства, четвертую исполнительную схему, выход которой соединен со световой сигнализацией. Изобретение обеспечивает повышение эффективности регулирования скоростного режима объектов транспортного потока.
Изобретение относится к транспортному машиностроению и может быть использовано, главным образом, в качестве датчика системы предупреждения столкновения автомобиля при движении вколонне или системы управления движением колонны, для повышения эффективности действия процесса торможения автомобиля, снабженного, например, антиблокировочной системой и в других случаях. Известно устройство [Патент РФ №2161814 С 1, МПК G05D 1/02, В 60К 31/00, G08G 1/16, 2001], содержащее устройства слежения за впереди едущим транспортным средством, оснащенные, например, устройствами воздействия на тормозную систему автомобиля. Недостаток подобных устройств очевиден - при ложном срабатывании возможно возникновение аварийной ситуации.
Наиболее близкой к предлагаемому решения является система предотвращения столкновений транспортных средств в колонне [Патент РФ №2292564 С 2, МПК G01S 13/93, 2006], содержащая антенну, модулятор, первый усилитель мощности, смеситель, преобразователь частоты, детектор, первый и второй регистраторы скорости, регистратор дальности и вычислитель опасного расстояния по дальности, путевой скорости и скорости сближения, генератор непрерывных колебаний, второй усилитель мощности, сумматор, циркулятор и фильтр доплеровских частот, причем выход генератора непрерывных колебаний соединен с входом модулятора, первым входом смесителя и входом второго усилителя мощности, выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом первого усилителя мощности, вход которого соединен с выходом модулятора, выход сумматора соединен со вторым входом циркулятора, первый вход которого соединен с антенной, а выход - со вторым входом смесителя, выход которого соединен с входами преобразователя частоты и фильтра доплеровских частот, выход которого соединен с входом второго регистратора скорости, выход которого соединен с первым входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, выход преобразователя частоты через детектор соединен с первыми входами регистратора дальности и первого регистратора скорости, выход модулятора соединен с вторыми входами первого регистратора скорости и регистратора дальности, выход которого соединен с вторым входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, выход первого регистратора скорости соединен с третьим входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, второй выход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения связан с входом схемы управления положением антенны, первый выход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения связан с входом первой исполнительной схемы, выход которой соединен с источником звука, а третий - с входом второй исполнительной схемы, выход которой связан с дроссельной заслонкой. Недостаток подобных устройств очевиден - эффективность торможения двигательно-тормозной системы (вспомогательной тормозной системы) мала. Недостатком подобных систем кроме этого является то, что датчик отслеживает взаимное положение между ближайшими объектами колонны, что не позволяет рационально реагировать на изменение режима движения другими объектами колонны и не позволяет "лидеру" колонны контролировать состояние других объектов колонны, что затрудняет принятие рационального решения по скоростному режиму движения колонны в целом.