DICOM PS3.3 2020a - Information Object Definitions Page 1659
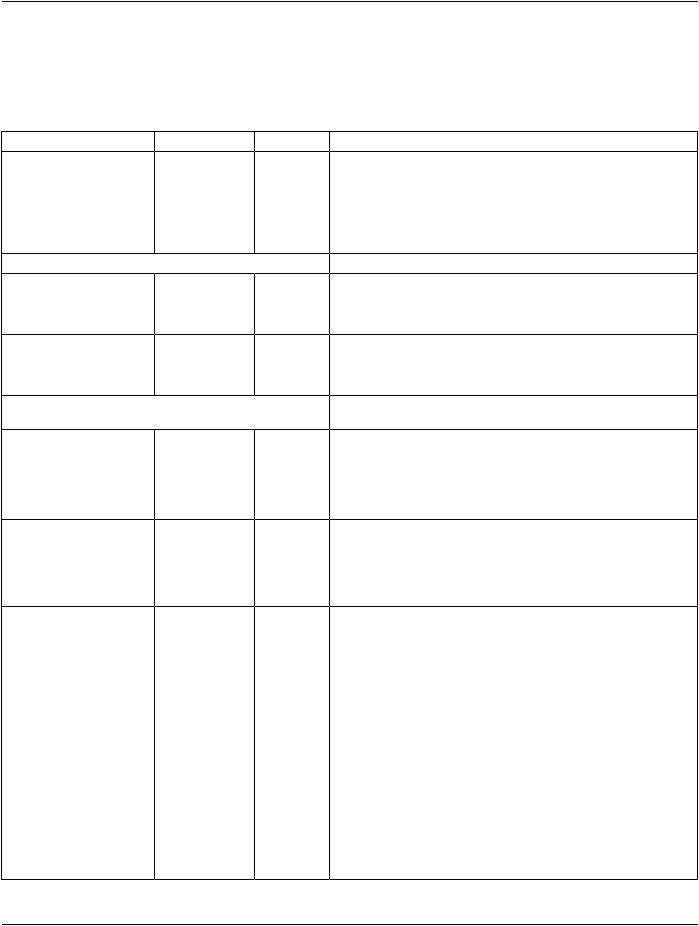
Table C.36.17-2. Tomotherapeutic Leaf Open and Closed Durations
N Control Point |
Attribute |
Leaf 1 |
Leaf 2 |
Leaf 3 |
Index |
|
|
|
|
|
1 |
Tomotherapeutic Leaf Open Durations |
0.4s |
0.3s |
0.1s |
|
Tomotherapeutic Leaf Closed Durations |
0 |
0 |
0.1s |
2 |
Tomotherapeutic Leaf Open Durations |
0.5s |
0.3s |
0.1s |
|
Tomotherapeutic Leaf Closed Durations |
|
Not present |
|
3 |
Tomotherapeutic Leaf Open Durations |
0.3s |
0.1s |
0 |
|
Tomotherapeutic Leaf Closed Durations |
|
Not present |
|
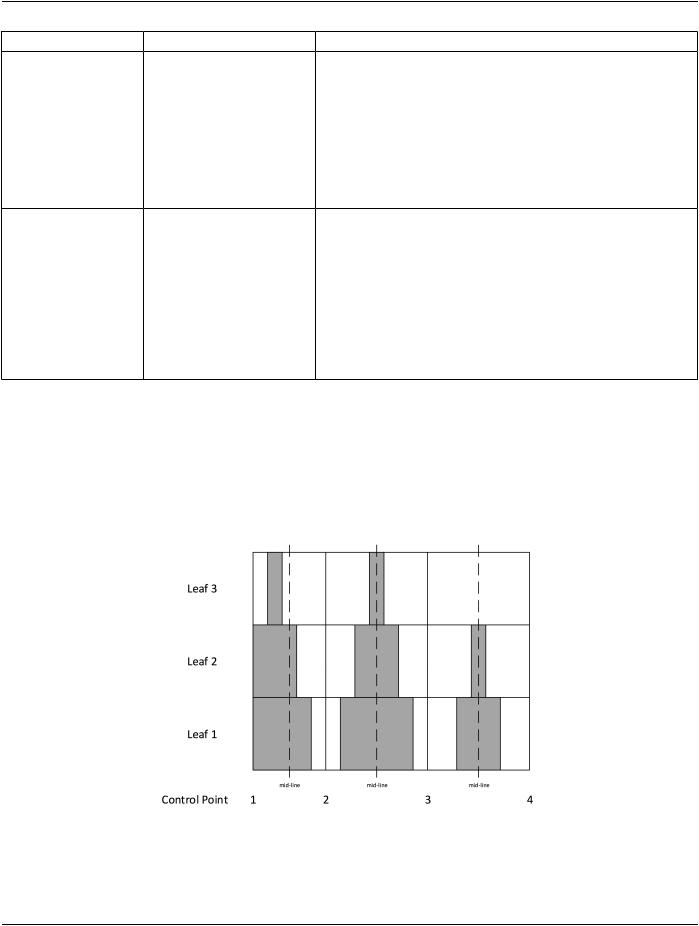
In Figure C.36.17-1, the grey sections indicate when the leaves are open during radiation delivery. Table C.36.17-2 illustrates the use of Tomotherapeutic Leaf Open Durations (3010,0099) and Tomotherapeutic Leaf Initial Closed Durations (3010,009A) based on the diagram. In the Control Point interval between Control Point 1 and 2, the leaf openings are not symmetric within the Control Point interval, so Tomotherapeutic Leaf Initial Closed Durations (3010,009A) is provided.
In the Control Point interval between Control Point 2 and 3, all leaf opening durations are symmetric about the mid-point of the Control Point interval, therefore only Tomotherapeutic Leaf Open Durations (3010,0099) is provided.
C.36.18 Robotic-Arm Delivery Device Module
The Robotic-Arm Delivery Device Module contains robot-specific information pertaining to the physical device. These parameters are used to specify or record the treatment, including geometric parameters of the collimation system.
Table C.36.18-1. Robotic-Arm Delivery Device Module Attributes
Attribute Name |
Tag |
Type |
Description |
Robotic Base Location |
(3010,0090) |
1 |
Informative manufacturer-specific description of the location of the |
Indicator |
|
|
base of the robot. The value is independent of the Equipment |
|
|
|
Coordinate System. |
|
|
|
Defined Terms: |
|
|
|
FLOOR_LEFT Looking from the table towards the robot, the |
|
|
|
robot is floor-mounted to the viewer's left. |
|
|
|
FLOOR_RIGHTLooking from the table towards the robot, the |
|
|
|
robot is floor-mounted to the viewer's right. |
|
|
|
FLOOR_CENTERLooking from the table towards the robot, the |
|
|
|
robot is floor-mounted straight ahead of the |
|
|
|
viewer. |
Include Table C.36.2.2.7-1 “Radiation Generation Mode MacroDefinedCIDforRadiationTypeCodeSequence(300A,067F)isCID Attributes”. 9525 “Radiation Therapy Particle”.
Defined CID for Energy Unit Code Sequence (300A,0684) is CID 9521 “Radiotherapy Treatment Energy Unit”.
Defined CID for Radiation Fluence Modifier Code Sequence (300A,0683) is CID 9549 “Radiation Generation Mode Types”.
IncludeTableC.36.2.2.8-1“RTBeamLimitingDevicesDefinitionDefined CID for Device Type Code Sequence (3010,002E) within Macro Attributes”. 'RT Accessory Device Identification Macro' is CID 9541 “Beam
Limiting Device Types”.  Include Table C.36.2.2.14-1 “RT Accessory Holders Definition Macro Attributes”.
Include Table C.36.2.2.14-1 “RT Accessory Holders Definition Macro Attributes”.