Page 1652 |
DICOM PS3.3 2020a - Information Object Definitions |
•The Base Beam Modifier Coordinate System for all beam modifiers is the [IEC 61217] GANTRY coordinate system. However, RT Radiation SOP Classes allow each Beam Modifier Coordinate System to rotate independently from the Base Beam Modifier Co- ordinate System.
Note
1.[IEC 61217] refers to the X-axis, Y-axis and Z-axis of the various coordinate systems. When referenced in this Standard the capital X/Y/Z is preserved which is not otherwise a DICOM convention.
2.FortheC-armPhoton-ElectronRadiationIODandtheTomotherapeuticRadiationIOD,theRTBeamModifier Definition Distance (300A,0688) is the same as the Radiation Source-Axis Distance (300A,0640).
C.36.12.2.2 Standard Robotic-Arm Coordinate System Frame of Reference
The Well-known Value of 1.2.840.10008.1.4.3.2 for Equipment Frame of Reference UID (300A,0675) identifies the Standard Robotic- Arm Coordinate System Frame of Reference to which each device is calibrated during installation.
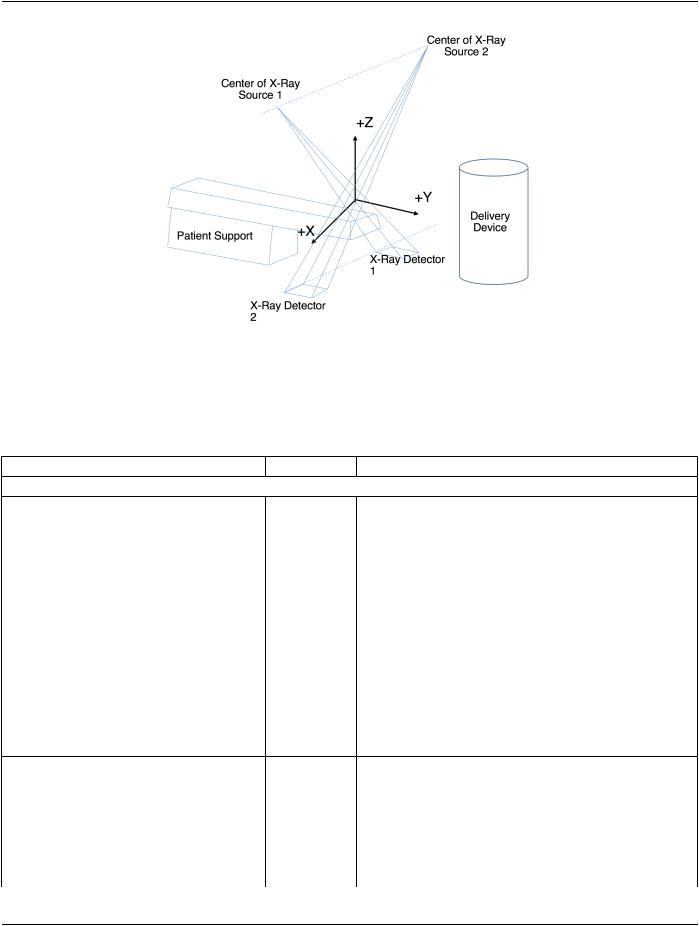
This coordinate system definition requires that two X-Ray detectors are present at the same height and the X-ray beams intersect.
The right-handed coordinate system axes are oriented as follows, when viewed from the patient support device pedestal towards the delivery device:
•the x-axis is increasing to the right, parallel to the line between the centers of the X-ray detectors and perpendicular to gravity
•the z-axis is increasing away from the direction of gravity
•the y-axis is the cross-product of the z- and x-axis
The origin of the coordinate system is the intersection of the central beams from each X-ray source, where the central beam is the line from the X-ray source to the center of the corresponding detector. The coordinate system definition is independent of the location of the delivery device and the patient support system.
MovementsoftherobotheadaredescribedintheStandardRobotic-ArmCoordinateSystem.Therotationoftherobotheadisexpressed by a rotation of the Radiation Source Coordinate System with respect to the Standard Robotic-Arm Coordinate System. The origin of the Radiation Source Coordinate System is defined at the RT Device Distance Reference Location. The axes of the Radiation Source Coordinate System coincide with the Standard Robotic-Arm Coordinate System under the following conditions:
•the source position equals 0,0,0, and
•the pitch, roll, and yaw angles equal zero.
The Radiation Source Coordinate System is the parent system of the Base Beam Modifier Coordinate System. The Base Beam Modifier Coordinate System is negatively offset along the z-axis of the Radiation Source coordinate system by the RT Beam Modifier Definition Distance (300A,0688).

 Include Table C.36.2.2.10-1 “Wedges Definition Macro Attributes”.
Include Table C.36.2.2.10-1 “Wedges Definition Macro Attributes”. Include Table C.36.2.2.13-1 “Blocks Definition Macro Attributes”.
Include Table C.36.2.2.13-1 “Blocks Definition Macro Attributes”. Include Table C.36.2.2.15-1 “General Accessories Definition Macro Attributes”. Include Table C.36.2.2.16-1 “Boluses Definition Macro Attributes”.
Include Table C.36.2.2.15-1 “General Accessories Definition Macro Attributes”. Include Table C.36.2.2.16-1 “Boluses Definition Macro Attributes”. >Include Table C.36.2.2.9-1 “RT Beam Limiting Device Opening Macro Attributes”. >Include Table C.36.2.2.11-1 “Wedge Positions Macro Attributes”.
>Include Table C.36.2.2.9-1 “RT Beam Limiting Device Opening Macro Attributes”. >Include Table C.36.2.2.11-1 “Wedge Positions Macro Attributes”.