DICOM PS3.3 2020a - Information Object Definitions |
Page 1131 |
Zt |
|
Xt |
|
Zv |
|
Yt |
|
Xv |
|
Yv |
|
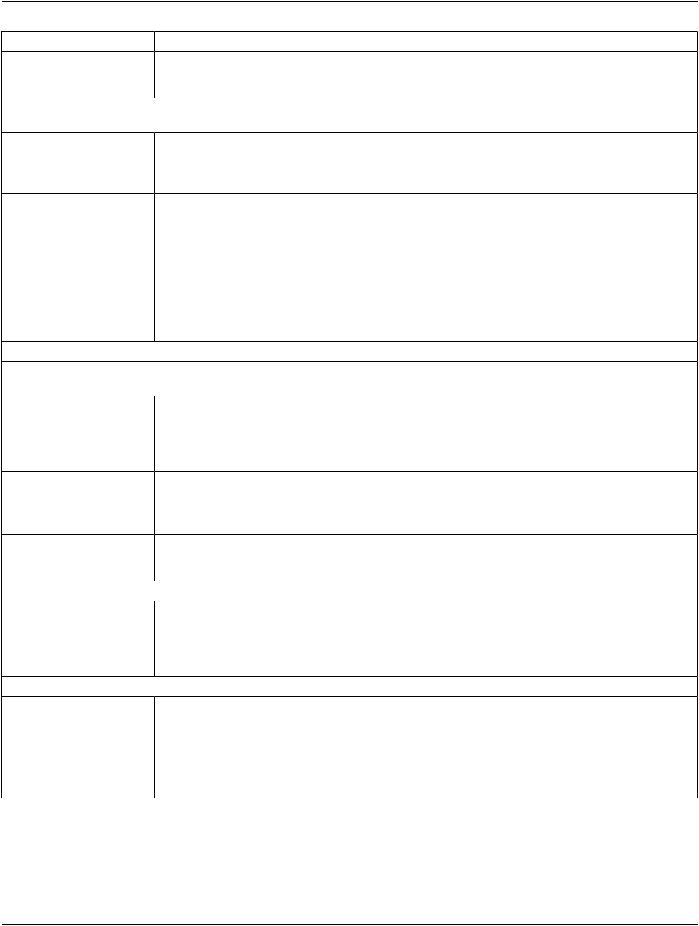
Figure C.8.24.2-3. Table Frame of Reference
C.8.24.2.2 Ultrasound Frame of Reference Module Attributes
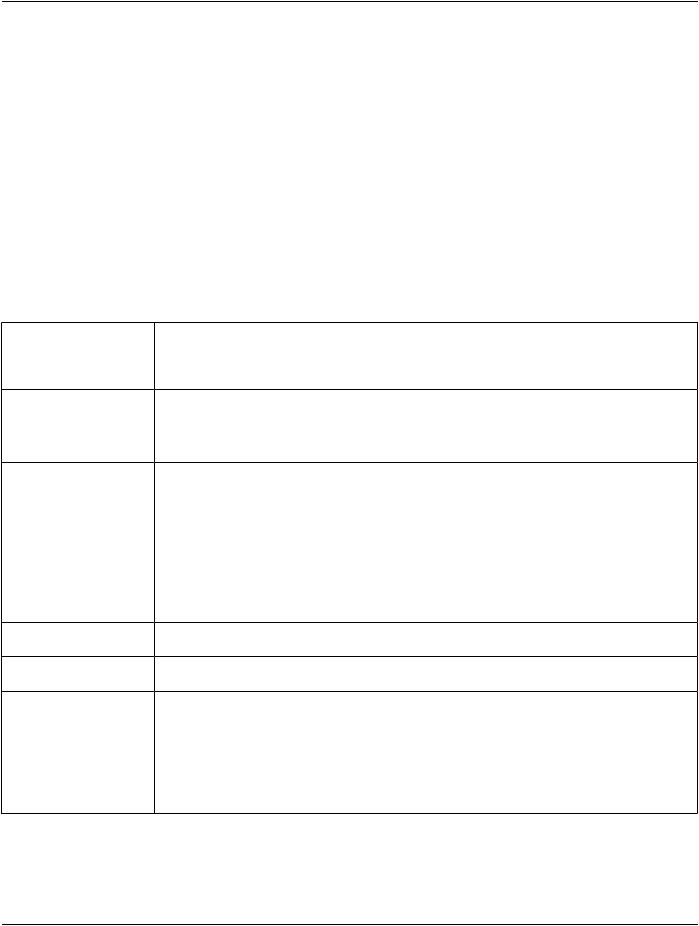
C.8.24.2.2.1 Volume to Transducer Mapping Matrix
TheVolumetoTransducerMappingMatrix(0020,9309)isusedtodescribetherelationshipbetweentheTransducerFrameofReference coordinate system and the Volume Frame of Reference coordinate system.
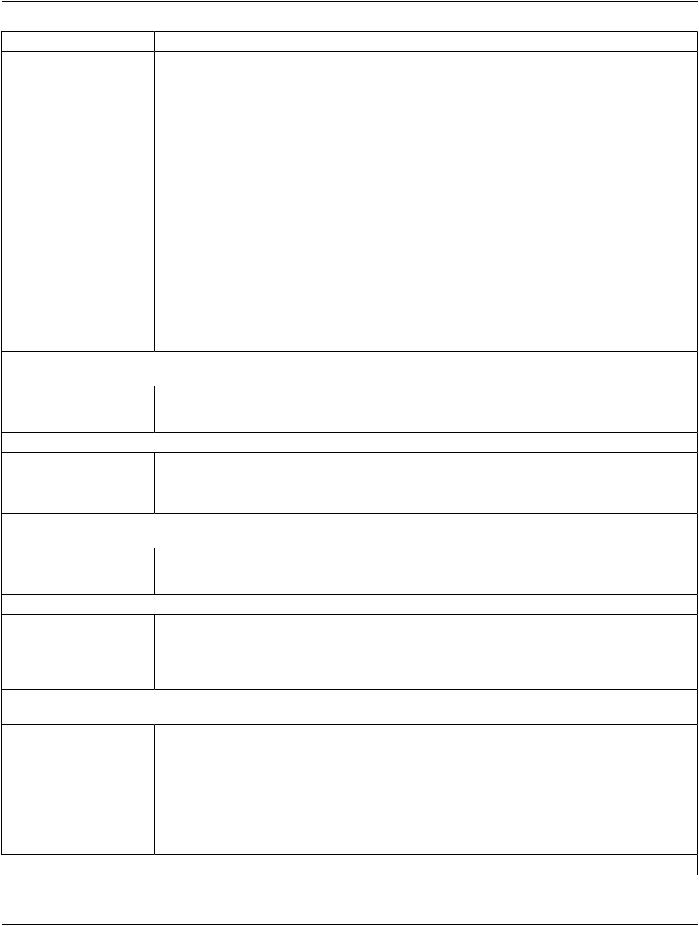
The Volume to Transducer Mapping Matrix ([MTV] = [P]*[Q]) describes how to transform a point (XV, YV, ZV) in the Volume coordinate system into (XX,YX, ZX) in the Transducer coordinate system according to the equation below.
Where:
XVYVZV
XXYXZX
Pij,Pij,Pij
Qx,Qy,Qz
The voxel location (in mm) in the Volume Frame of Reference
The voxel location (in mm) in the Transducer Frame of Reference
A 3x3 matrix of direction cosine values as measured to the Transducer origin from the volume origin.
The translation values (in mm) describe the location in mm of the Transducer Frame of Reference (XX,YX, ZX) origin from the Volume Reference Origin (XV,YV, ZV) measured in millimeters along the Volume axes i.e., to the transducer origin from the volume origin.
C.8.24.2.2.2 Volume to Table Mapping Matrix
The Volume to Table Mapping Matrix (0020,930A) is used to describe the relationship between the Volume Frame of Reference co- ordinate system and a modality specific equipment coordinate system. This mapping can be used only with systems that have a well- defined equipment coordinate system.
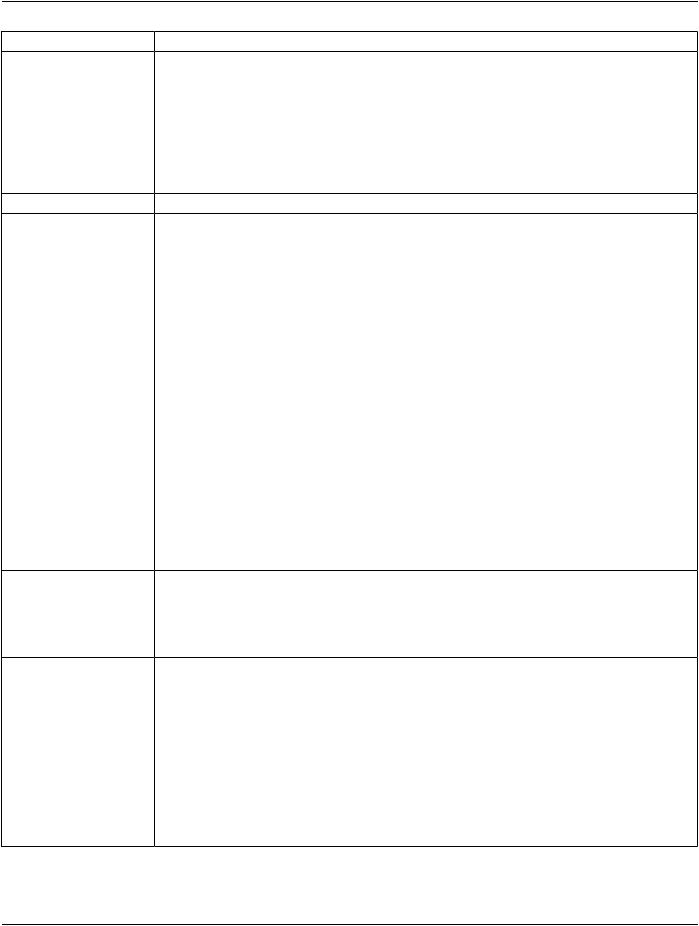
The Volume to Table Mapping Matrix([MVG] = [R]*[S]) describes how to transform a point (XVYVZV) in the Volume coordinate system into (XT, YT, ZT) in the Table coordinate system according to the equation below.
X |
|
|
R |
R |
|
R |
|
S |
X |
|
|
T |
|
|
XX |
|
YX |
|
ZX |
|
X V |
|
(C.8.24- |
YT |
= |
RXY |
RYY |
RZY |
SY YV |
ZT |
RXZ |
RYZ |
RZZ |
SZ ZV |
1) |
1 0 |
0 0 1 1 |
Where: |
|
XVYVZV |
The voxel location (in mm) in the Volume Frame of Reference |
 >Include Table 10-11 “SOP Instance Reference Macro Attributes”
>Include Table 10-11 “SOP Instance Reference Macro Attributes”