DICOM PS3.3 2020a - Information Object Definitions |
Page 825 |
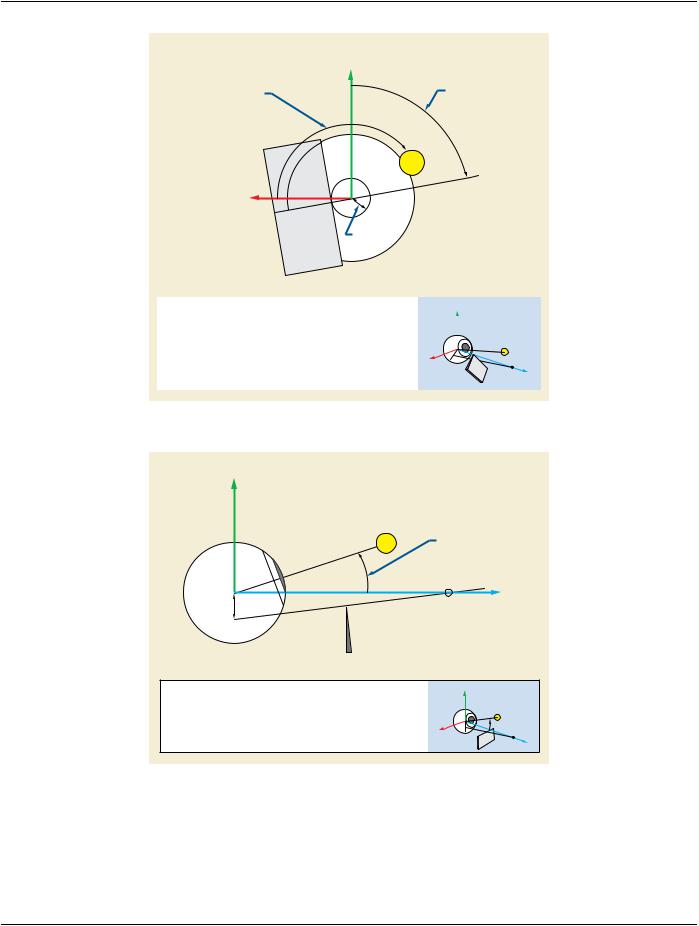
In this case, it is recommended that a beam limiting device angle of 90º be formally applied (provided the gantry angle is defined to be 90º (and not 270º). This results in the same coordinates of the fixation light and wedge relative to the patient as in the treatment situation with the patient lying on the table.
C.8.8.25.6.5 Gantry Pitch Angle
The Gantry Pitch Angle is not defined in IEC 61217. This angle is defined in the DICOM Standard in a way compatible with the current notion of IEC by introducing it as rotation of the IEC GANTRY System as indicated below.
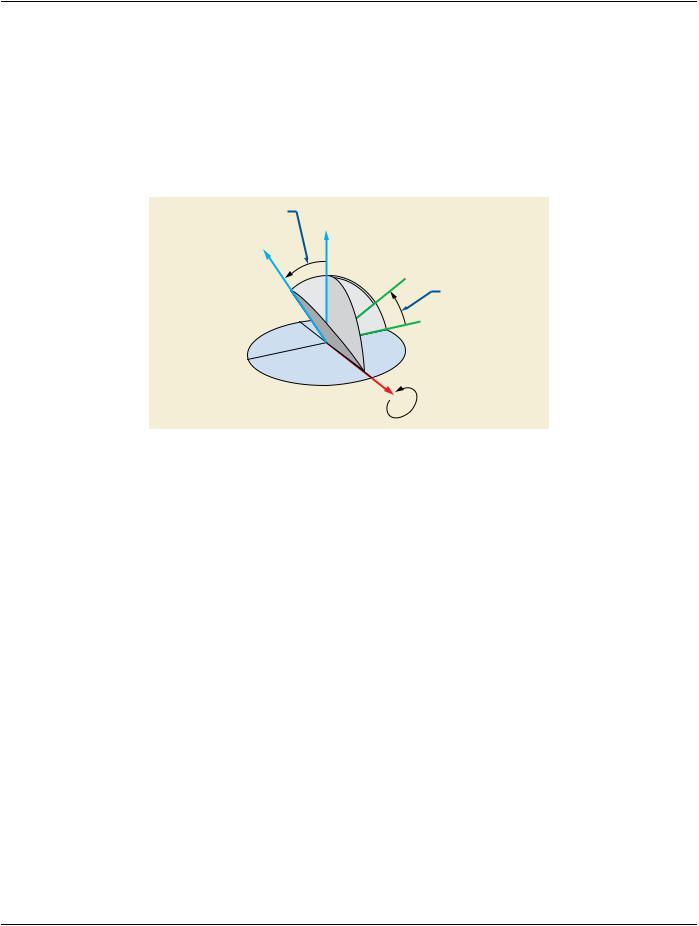
The Gantry Pitch Angle is defined as the rotation of the coordinate axes Yg, Zg about axis Xg by an angle ψg; See Figure C.8.8.25- 7. An increase in the value of angle ψg corresponds to the clockwise rotation as viewed from the isocenter along the positive Xg axis
Ψg Zg
Z’g
 Y’g
Y’g
Ψg
 Yg
Yg
Xg - Yg Plane
Xg
Figure C.8.8.25-7. Gantry Pitch Angle
C.8.8.25.7 Ion Control Point Sequence
The control point sequence for RT Ion Beams is defined using the same rule set as in the RT Beams Module (see Section C.8.8.14.5). Specifically, the following rules apply:
•All parameters that change at any control point of a given beam shall be specified explicitly at all control points (including those preceding the change).
•All parameters of an irradiation segment (i.e., with values of the Cumulative Meterset Weight (300A,0134) different at the beginning and at the end of the segment) shall therefore be specified in 2 separate control points denoting the beginning and at the end of this segment. Each irradiation segment is therefore represented by 2 control points.
•Parameters changing during the segment shall be represented by their different values at those control points. Parameters that do not change during the segment shall be represented with equal values at both control points (unless they are constant for all control points of the beam). For example, a beam delivery involving two independent irradiation segments will require 4 control points. ControlPoints0and1definethefirstirradiationsegment.Betweencontrolpoints1and2,noradiationisgiven(Metersetisconstant), but other parameters may change. Finally, the second irradiation segment occurs between control points 2 and 3.
Thisdefinitionallowsunambiguousandexplicitdeterminationofthoseparameterschangingwhileirradiationisoccurring,asopposed tothoseparametersthatchangebetweenirradiationsegments.Noassumptionsaremadeaboutthebehaviorofmachineparameters between specified control points, and communicating devices shall agree on this behavior outside the Standard.
The following example illustrates this rule (not all parameters are shown), in the case of a scanning beam with 2 segments and Total Cumulative Meterset of 70.
ControlPoint0:Allapplicabletreatmentparametersdefined,CumulativeMetersetWeight=0NominalEnergy:200ScanSpotPosition Map: -40, -35, -40, -30 (Positions for 1st segment) Scan Spot Meterset Weight: 0.5, 0.3, 1.2, (Values add up to Meterset difference between Control Points 0 and 1)
 Z
Z X
X X
X