Материал: Общая физика_под ред. Белокопытова_2016 -506с
3.2. Силовое поле. Потенциальные и непотенциальные силы. Критерий потенциальности поля сил
Силовым полем называется часть пространства (ограниченная или неограниченная), в каждой точке которой на помещенное туда материальное тело действует сила, модуль и направление которой зависят либо только от координат этого тела, либо от координат и времени. В первом случае силовое поле называется стационарным, во втором — нестационарным. Если же сила во всех точках силового поля имеет одно и то же значение и направление, то силовое поле называется однородным. Понятие поля было введено в физику английским ученым М. Фарадеем (1791—1867), что, по мнению А. Эйнштейна, было «самым важным открытием со времен Ньютона». В нашем курсе будем рассматривать гравитационное поле, электромагнитное поле, поле ядерных сил и т.д.
Существует особый класс полей, называемых потенциальными.
Сила поля, действующая на тело, называется потенциальной, если работа этой силы зависит только от начального и конечного положения тела и не зависит ни от вида траектории, ни от закона движения тела.
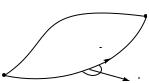
Пусть материальная точка перемещается в потенциальном поле
из положения 1 |
в положение 2 |
º |
|
(рис. 3.3). Работа силы поля F |
на |
||
|
|
º |
|
траектории а равна работе силы поля F на траектории b по опреде- |
|||
лению: A(F) = |
A(F) . |
|
|
1-a-2 |
1-b-2 |
|
|
Но, поскольку cos α = – cos β , то A(F) = – A(F). Тогда нетрудно
|
|
1-b-2 |
2-b-1 |
получить, что A(F) + |
A(F) = 0 , |
т.е. A(F) |
= 0 . Таким образом, |
1-a-2 |
2-b-1 |
1-a-2-b-1 |
|
работа потенциальной силы по замкнутой траектории 1-a-2-b-1 равна нулю. Так как траектории а и b были произвольными, то можно сказать, что работа потенциальной силы на любой замкнутой траекто-
|
|
a |
2 |
||||
|
|
|
|
|
|
||
|
|
|
dl |
|
|||
1 |
b |
|
|
|
α |
||
|
β |
|
|
|
|
|
|
|
|
|
|
F |
|||
|
|
|
|
|
|||
Рис. 3. 3
36
рии L всегда равна нулю. Эту фразу можно коротко записать следующим образом:
º º |
(3.4) |
F dr = 0 . |
L
º
Такой интеграл носит название циркуляции вектора F по замкнутому контуру L, а полученное выражение дает критерий потенциальности поля сил.
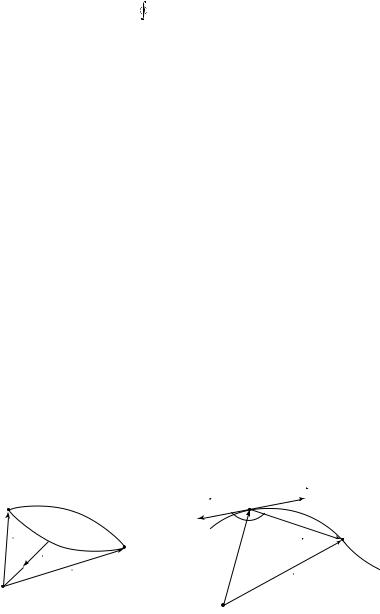
Существует особый класс сил, линия действия которых проходит всегда через одну и ту же точку (центр), а модуль этих сил зависит только от расстояния до этой точки. Такие силы называются центральными. Примеры таких сил — сила тяжести, кулоновская, сила упругости и др. Центральные силы являются потенциальными.
º
Пусть на материальную точку действует центральная сила F , линия действия которой проходит через точку О (рис. 3.4). Материальная точка перемещается по траектории а из положения 1 в положение 2,
определяемые соответствующими радиусами-векторами ºr 1 и ºr 2
º
(начало координат поместим в точку О). Тогда работа силы F будет определяться по формуле (3.3). Если существует первообразная f подинтегральной функции F, то, согласно формуле Ньютона—Лейб- ница можно написать A(F ) = f (r2 ) – f (r1 ). Откуда видно, что работа
º
силы F определяется только координатами точек 1 и 2. Для любой другой траектории b, проходящей через эти же точки, получается такое же выражение для работы, т.е. работа не зависит от вида траектории, а определяется начальным и конечным положением точки приложения силы. Следовательно, так как гравитационная, упругая и кулоновская силы центральные, то соответствующие им поля являются потенциальными.
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
v |
||
|
|
|
b |
Fтр |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
a |
|
|
|
|
|
β |
2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
r |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r1 |
|
|
|
|
L |
|
|
|
|
F |
|
|||||||||||||
|
|
|
|
|
|
r |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
O
Рис. 3. 4 |
O |
|
Рис. 3. 5
37
Рассмотрим работу силы |
|
трения |
скольжения (рис. 3.5). Если |
º |
|
t, то работа силы трения скольжения |
|
r — перемещение за время |
|
||
находится по формуле |
|
|
|
º |
º |
Fтр r cos β . |
|
A(Fтр ) = F |
тр r = |
||
Рассмотрим бесконечно малый промежуток времени d t. Модуль перемещения тела за этот промежуток стремится к пройденному пути, в то время как направление силы трения противоположно
направлению вектора перемещения. |
|
Тогда получаем δA(Fтр ) = – FтрdS . Полная работа на |
пути S |
будет вычислена следующим образом: |
|
S |
|
A(Fтр ) = – ∫ Fтр dS . |
(3.5) |
0 |
|
Видно, что работа силы трения скольжения зависит от пути интегрирования и является отрицательной. Как будет показано далее, сила трения скольжения всегда приводит к убыли механической энергии тела, поэтому эту силу называют диссипативной.
3.3. Кинетическая энергия материальной точки. Теорема об изменении кинетической энергии
Пусть материальная точка движется из положения 1, где она
º º
имела скорость v 1 , в положение 2, где скорость стала равной v 2 . Обозначим равнодействующую всех сил, приложенных к точке,
º
через R и найдем ее работу по перемещению тела. Учтем соотношение (2.10) и получим
º |
2 º |
|
2 |
º |
2 |
º |
||
A( R ) = ∫ |
|
º |
= ∫ |
d--------p |
º |
|
º -------d r |
|
R d r |
dt |
d r |
= ∫d p |
|||||
|
1 |
|
|
1 |
|
1 |
dt |
|
|
|
|
|
|
|
|||
2
= v d p .
∫ º º
1
Напомним, что скалярное произведение вектора самого на себя
равно квадрату модуля этого вектора: |
º º |
|
2 |
. Поэтому |
|
||||
v v |
= v |
|
|||||||
º |
2 º |
º |
2 |
2 |
⁄ 2) = mv |
2 |
2 |
⁄ 2 . |
|
A( R ) = ∫ v |
d(m v |
) = ∫d(mv |
|
2 |
⁄ 2 – mv1 |
||||
|
1 |
|
1 |
|
|
|
|
|
|
В приведенном выводе рассмотрен нерелятивистский случай движения (v << c), поэтому т = const.
38
Величина |
mv |
2 |
называется кинетической энергией Wк матери- |
----------- |
|||
|
2 |
|
|
альной точки. Так как работа равнодействующей силы равна сумме работ сил, то можно записать, что
N |
º |
|
Wк = Wк2 – Wк1 = ∑ A( Fi) . |
(3.6) |
|
i = 1
Таким образом, доказана теорема об изменении кинетической энергии: изменение кинетической энергии материальной точки равно алгебраической сумме работ всех приложенных к ней сил.
Рассмотрим теперь систему материальных точек. Кинетической энергией системы тел называется сумма кинетических энергий всех
mv 2
тел, входящих в эту систему: Wк.сист = ∑ ----------- . Запишем теорему об
2
изменении кинетической энергии для каждой точки, входящей в эту систему. Тогда для j-й точки получаем уравнение
|
N |
º |
N |
º |
|
|
Wк j = ∑ A( Fi) + |
∑ A( f i) , |
|
||
|
i = 1 |
|
i = 1 |
|
|
º |
|
|
|
º |
|
в котором F |
— внешние силы, действующие на эту точку; |
f — |
|||
внутренние силы. Сложив все уравнения, получим: |
|
||||
|
|
º |
|
º |
|
|
Wк.сист = ∑A( F ) + ∑A( f ) . |
(3.7) |
|||
Изменение кинетической энергии системы материальных точек определяется работой как внутренних, так и внешних сил. Напомним, что изменение импульса системы материальных точек определяется импульсом только внешних сил (2.10).
3.4. Потенциальная энергия взаимодействия
Пусть задана система материальных точек, между которыми действуют только потенциальные силы. Если система под действием этих сил перешла из одного состояния в другое (изменились положения тел, их скорости и т.п.), то потенциальные силы совершили работу, которая не зависит от того, каким образом осуществилось изменение состояния системы. Работа потенциальных сил зависит только от начального и конечного состояний системы. Поэтому эту работу можно взять в качестве характеристики изменения состояния системы тел.
39
Введем потенциальную энергию системы тел Wп, которая связана с работой потенциальных сил по следующему правилу:
Wп1 – Wп2 = A1 → 2( fп ) , |
|
(3.8) |
где Wп 1 — потенциальная энергия системы |
тел в состоянии 1; |
|
Wп 2 — потенциальная энергия системы тел |
в состоянии 2; |
|
A1 → 2( fп ) — работа потенциальных сил взаимодействия при пере-
ходе системы из состояния 1 в состояние 2. Это правило можно переписать в виде:
Wп = – A1 → 2( fп ) или dWп = – δA1 → 2( fп ).
Из последнего выражения видно, что работа потенциальных сил совершается за счет убыли потенциальной энергии системы. Изменение потенциальной энергии системы тел, между которыми действуют потенциальные силы, равно взятой с обратным знаком работе этих сил при переходе системы из одного состояния в другое.
Физический смысл имеет только изменение потенциальной энергии, однако часто говорят о потенциальной энергии системы в данном состоянии. В этом случае потенциальная энергия в одном из состояний условно принимается за нуль (нулевой потенциальный уровень). Пусть Wп 1 = 0, тогда Wп2 = – A1 → 2( fп ) = A2 → 1( fп ) . Таким образом, можно сказать, что потенциальная энергия системы в некотором состоянии равна работе потенциальных сил при переходе системы из этого состояния в состояние, в котором значение потенциальной энергии условно принято за нулевое.
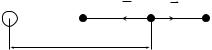
В качестве примера рассмотрим изменение потенциальной энергии гравитационного взаимодействия двух материальных точек массами М и т при удалении одной от другой, когда расстояние между ними увеличивается от r1 до r2 (рис. 3.6). Допустим, что тело массой
М создает гравитационное поле, а тело массой т перемещается в этом поле из точки 1 в точку 2. Точки находятся на расстояниях r1 и
r2 соответственно от массы, создающей поле. Поскольку гравитацион-
ная сила — центральная, то перемещение массы т может осуществляться по любой траектории. Работа гравитационной силы не зависит от формы траектории движения тела, а рассчитывать ее удобнее
M |
1 |
F m dr 2 |
|
r
Рис. 3. 6
40