Материал: Общая физика_под ред. Белокопытова_2016 -506с
6.4. Механическая энергия гармонических колебаний
Рассмотрим механические колебания пружинного маятника, совершающего свободные гармонические колебания, описываемые уравнением x(t) = A cos (ωt ). Полная механическая энергия такого маятника в произвольный момент времени является суммой потенциальной энергии упругой деформации пружины Wп и кинетической
энергии груза Wк .
Выразим кинетическую энергию груза на пружине:
W |
|
= |
mv |
2 |
= |
m |
dx |
|
2 |
= |
mω2A2 |
sin |
2 |
(ωt) = |
kA2 |
sin |
2 |
(ωt) . |
|
---------- |
----- ----- |
|
------------------ |
|
--------- |
|
|||||||||||
|
к |
|
2 |
|
|
2 |
dt |
|
|
|
2 |
|
|
|
2 |
|
|
|
Найдем потенциальную энергию упругодеформированной пружины:
W |
|
= |
1 |
= |
mω2x2 |
= |
kA |
2 |
cos |
2 |
(ωt). |
п |
---- kx 2 |
----------------- |
--------- |
|
|||||||
|
|
2 |
|
2 |
|
2 |
|
|
|
|
|
Графики зависимостей потенциальной и кинетической энергии гармонических колебаний от времени показаны на рис. 6.6. Следует
отметить, что частота колебаний энергии ω* = 2ω , а ее максимальное значение пропорционально квадрату амплитуды смещения материальной точки.
x
Tt
Wк
Tt
Wп
Tt
Рис. 6. 6
81
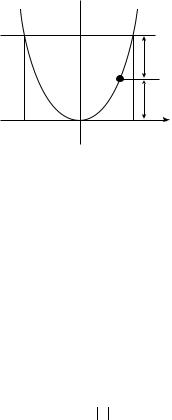
Wп
 B
B
W
Wк
Wп
–A |
0 |
A |
x |
Рис. 6. 7
Полная механическая энергия при свободных колебаниях не изменяется:
W = Wк + Wп = mω2A2 ⁄ 2 = kA2 ⁄ 2 = const , поскольку в системе отсутствуют диссипативные силы.
Рассмотрим движение шарика в гладком параболическом желобе. На рис. 6.7 показано соотношение между потенциальной и кинетической энергиями в зависимости от положения шарика в «потенциальной яме». Если смещение шарика от положения устойчивого равновесия x = 0, то его кинетическая энергия достигает максимума, а потенциальная обращается в нуль. Когда смещение шарика x = ± A (точки поворота), кинетическая энергия обращается в нуль, потенциальная же энергия достигает максимума. При движении смещение шарика может принимать значения x ≤ A . С позиций закона сохранения энергии шарик не может оказаться за пределами этой области, например в точке В. В этом случае его кинетическая энергия приняла бы значение Wк = W – Wп < 0, что невозможно.
6.5. Затухающие колебания
Рассмотрим пружинный |
маятник, на |
который действует сила |
|
|
|
|
· |
сопротивления, линейно зависящая от скорости Fтр = – μv = –μx . |
|||
Векторное уравнение второго закона Ньютона примет вид: |
|||
º |
º |
º |
º |
m a = |
m g |
+ Fупр + |
Fтр . |
Запишем второй закон Ньютона в скалярном виде: |
|||
·· |
|
|
· |
mx = mg – k( l + x) – μx .
82

Тогда дифференциальное уравнение затухающих колебаний выглядит следующим образом:
·· |
μ |
· |
k |
|
---- |
---- |
, |
||
x + |
m x + |
m x = 0 |
||
где μ / m = 2β (β — коэффициент затухания); k / m = ω20 (ω0 —
собственная частота свободных гармонических колебаний).
Дифференциальное уравнение свободных затухающих колебаний линейной системы имеет вид
d2x |
dx |
2 |
|
-------- |
----- |
+ ω0x = 0 . |
|
dt |
2 |
+ 2β dt |
|
|
|
|
|
Если затухание невелико (β < ω0 ), решением этого однородного линейного дифференциального уравнения является функция
x(t) = A0e– βt sin (ωt + ϕ0 ) ,
т.е. затухающие колебания не являются периодическими, однако величина x(t) обращается в нуль, а также достигает максимальных и минимальных значений через равные промежутки времени
T = |
2-----π- = ------------------------ |
2π - , |
(6.10) |
|
ω |
ω2 |
– β2 |
||
|
|
|
||
|
|
0 |
|
|
где T — период затухающих колебаний; ω =  ω20 – β2 — частота затухающих колебаний.
ω20 – β2 — частота затухающих колебаний.
Величина x(t) = A0e– βt называется амплитудой затухающих колебаний; A0 — начальная амплитуда. Амплитуда затухающих
колебаний уменьшается с течением времени тем быстрее, чем больше коэффициент затухания β.
Если сравнить амплитуды колебаний системы в моменты времени t и t + τ, то можно получить, что
A(t) |
βτ |
-------------------- |
= e . |
A(t + τ ) |
Если за промежуток времени τ амплитуда колебаний уменьшается в е раз, то β = 1/τ, т.е. коэффициент затухания — величина, обратная промежутку времени τ, в течение которого амплитуда затухающих колебаний уменьшается в e раз.
83

x |
|
|
|
Также для количественной характе- |
||
|
|
|
|
ристики быстроты убывания амплитуды |
||
|
|
|
|
затухающих колебаний вводится понятие |
||
|
|
|
|
логарифмического декремента δ: |
||
|
|
|
|
A(t) |
βT |
= βT . |
|
|
|
|
δ = ln -------------------- = ln e |
|
|
|
|
|
|
A(t + T) |
|
|
0 |
|
|
|
Если за время NT система совершит N |
||
|
t |
|||||
|
|
колебаний и их амплитуда уменьшится в |
||||
|
|
|
|
|||
|
|
|
|
T |
1 |
|
|
Рис. 6. 8 |
|
|
е раз, то δ = βT = ---- = |
--- |
. Таким обра- |
|
|
|
|
τ |
N |
|
зом, логарифмический декремент — безразмерная величина, обратная числу колебаний N, в течение которых амплитуда уменьшается в e раз.
Из выражения (6.10) следует, что при ω20 ≤ β2 колебания в сис-
теме не возникают. В этом случае наблюдается апериодический процесс (рис. 6.8), в результате которого вся запасенная в системе механическая энергия расходуется на работу против сил сопротивления. Каким из двух способов, показанных на рис. 6.8, система вернется в положение равновесия, зависит от начальных условий.
6.6. Вынужденные колебания. Резонанс
Вынуждающей силой называется переменная внешняя сила, приложенная к системе и вызывающая ее вынужденные механические колебания. Пусть вынуждающая сила изменяется по гармоническому закону F = F0 cos (ωt). Тогда дифференциальное уравнение вынуж-
денных колебаний запишем следующим образом:
d2x |
dx |
2 |
F0 |
|
|
|
-------- |
----- |
+ ω0x = |
----- |
cos (ωt) . |
(6.11) |
|
dt |
2 |
+ 2β dt |
m |
|||
|
|
|
|
|
|
|
Общее решение этого уравнения имеет вид
x(t) = A0e– βtcos (ω′t + α) + A cos (ωt – ϕ0 ) ,
где ω′ =  ω20 – β20 . В этом выражении первое слагаемое играет роль
ω20 – β20 . В этом выражении первое слагаемое играет роль
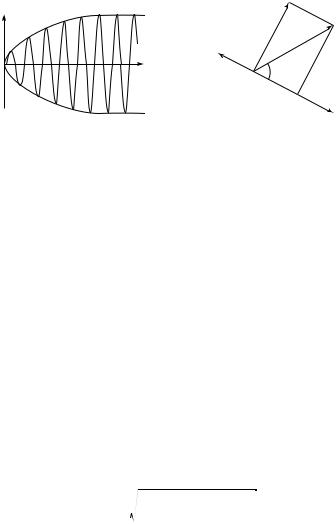
только на начальной стадии установления процесса колебаний. В дальнейшем этой составляющей решения можно пренебречь. Второе слагаемое описывает установившиеся вынужденные колебания (рис. 6.9).
84
|
|
A(ω2 |
– ω2) |
x |
2βAω |
0 |
|
|
|
||
|
|
|
|
Aω2 |
|
f0 |
|
t |
ϕ0 |
|
|
|
|
Aω2 |
|
|
|
|
0 |
Рис. 6. 9 |
Рис. 6. 10 |
|
|
Подставим x(t) = A cos (ωt – ϕ0) в уравнение (6.11). Для этого найдем
|
|
|
|
· |
(t) = –Aω sin (ωt – ϕ0 ) = Aω cos (ωt – |
|||||||
производные x(t) по времени: x |
||||||||||||
– ϕ0 + π ⁄ 2 ) |
·· |
|
|
2 |
cos (ωt – ϕ0 ) = Aω |
2 |
cos (ωt – ϕ0 + π) . |
|||||
и x(t) = –Aω |
|
|
||||||||||
Тогда получим: |
|
|
|
|
|
|
|
|
|
|
|
|
Aω2 cos (ωt – ϕ |
0 |
+ π) + 2βAω cos (ωt – ϕ |
0 |
+ π ⁄ 2) + |
||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
+ ω2A cos (ωt – ϕ |
0 |
) = f |
0 |
cos (ωt) , |
|||||||
|
0 |
|
|
|
|
|
|
|
|
|
||
где f0 = F0 ⁄ |
m . Используя метод векторных диаграмм, представим |
|||||||||||
левую часть последнего уравнения в виде суммы трех векторов (рис. 6.10), модули которых указаны на рисунке. Результат сложения этих трех векторов — вектор, модуль которого равен f0. Из рис. 6.10
следует, что (при ω0 > ω)
tg ϕ0 |
|
2βω |
|
||
= |
-------------------- |
. |
|||
ω2 |
– ω2 |
||||
|
|
|
|||
|
|
0 |
|
|
|
По теореме Пифагора найдем амплитуду вынужденных колебаний:
|
|
f0 |
|
(6.12) |
A = ------------------------------------------------------------ . |
||||
|
ω2 |
– ω2 2 |
+ 4β2ω2 |
|
|
0 |
|
|
|
Из (6.12) следует, что при ω = 0 в системе происходит статическое смещение из положения равновесия под действием постоянной силы
F0 на величину f0/ω20 (рис. 6.11).
При неограниченном возрастании частоты внешнего воздействия (ω → ×)?амплитуда колебаний стремится к нулю, tg ϕ0 → 0 и ϕ0 → – π.
Дифференцируя выражение (6.12) по переменной ω и приравнивая полученную производную нулю, определяем такую частоту внешнего воздействия ω = ωp , при которой амплитуда колебаний
85