Материал: Общая физика_под ред. Белокопытова_2016 -506с
где A — амплитуда колебаний (максимальное значение колеблющейся величины A = smax > 0).
Значение s в произвольный момент времени определяется значением фазы колебаний ϕ(t) = ωt + ϕ0 ; ϕ0 — начальная фаза, т.е. значение ϕ(t) в момент времени t = 0.
Из (6.1) видно, что первая и вторая производные s (t) по времени также совершают гармонические колебания той же частоты:
ds ⁄ d t = Aω cos (ωt + ϕ0 ) = Aω sin (ωt + ϕ0 + π ⁄ 2); |
|
|||||
|
|
|
|
|
|
|
d 2s ⁄ d t 2 = – Aω2 sin (ωt + ϕ |
|
|
|
|
|
(6.2) |
0 |
) = Aω2 sin (ωt + ϕ |
0 |
+ π), |
|||
|
|
|
|
|
||
|
|
|
|
|
|
|
причем амплитуды ds ⁄ d t и d 2s ⁄ d t 2 |
соответственно равны Aω и |
|||||
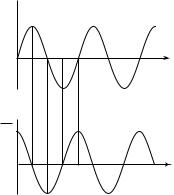
Aω2. Видно, что ds ⁄ d t опережает s по времени на T / 4, а по фазе на
π / 2; d 2s ⁄ d t 2 опережает s(t) по времени на T / 2, а по фазе на π . Графики s(t) и ds ⁄ d t при ϕ0 = 0 приведены на рис. 6.1. Из (6.2) следует,
что гармонически колеблющаяся величина s удовлетворяет дифференциальному уравнению
d2s |
+ ω2s = 0 , |
(6.3) |
|
-------- |
|||
d t |
2 |
|
|
|
|
|
|
которое называется дифференциальным уравнением гармонических колебаний.
s 
t
ds 
dt
Tt
Рис. 6. 1
76
6.2. Векторные диаграммы
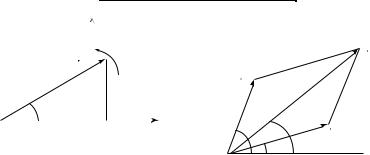
Гармонические колебания параметра s(t), которые описываются уравнением s(t) = A cos (ωt + ϕ0 ) , можно изобразить графически с помощью вращающегося на плоскости вектора (рис. 6.2). Для этого
º
из начала координат на плоскости проводят вектор A , модуль кото-
º
рого равен амплитуде колебаний. Вектор A составляет с осью ОХ угол ϕ = ωt + ϕ0, равный фазе колебаний в данный момент времени t.
С течением времени угол увеличивается так, что вектор вращается вокруг центра координат с угловой скоростью, равной циклической частоте гармонических колебаний. Проекция вектора на ось ОХ совершает гармонические колебания по закону s(t) = A cos (ωt + ϕ0 ) . Гра-
фическое изображение гармонических колебаний с помощью вращающегося вектора амплитуды называется методом векторных диаграмм. Им широко пользуются, например, при сложении одинаково направленных гармонических колебаний.
Рассмотрим сложение двух колебаний, одно из которых совершается по закону s1(t) = A1 cos (ωt + ϕ01 ) , а другое по закону s2 = = A2 cos (ωt + ϕ02 ) . В результате сложения этих колебаний получа-
ется тоже гармоническое колебание вида s(t) = A cos (ωt + ϕ0 ) . Это
нетрудно доказать с помощью метода векторных диаграмм (рис. 6.3). Если каждому из данных колебаний поставить в соответствие вращающийся вектор, то результирующее колебание определится вращением суммы векторов. Из рис. 6.3 видно, что амплитуда результирующего колебания находится по теореме косинусов следующим образом:
A = A2 |
+ A2 |
+ 2A |
1 |
A |
2 |
cos (ϕ |
02 |
– ϕ |
01 |
) . |
(6.4) |
||||||||
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωt |
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
||
A |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A2 |
|
|
|
|
|
|
|
|
||
ϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
A1 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Рис. 6. 2 |
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
ϕ02 ϕ01 |
ϕ0 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рис. 6. 3
77
Начальную фазу результирующего колебания можно определить из соотношения
tg ϕ0 |
|
A1 sin ϕ 01 |
+ A2 sin ϕ 02 |
|
|
= |
---------------------------------------------------------- |
. |
|||
A1 cos ϕ 01 |
+ A2 cos ϕ 02 |
||||
|
|
|
|||
Сумма двух векторов, вращающихся с одинаковыми угловыми скоростями, будет вращаться с той же угловой скоростью. Таким образом, мы доказали, что в результате сложения двух гармонических колебаний одинаковой частоты, происходящих в одном направлении, получается гармоническое колебание той же частоты, причем его амплитуда удовлетворяет условию A1 – A2 ≤ A ≤ A1 + A2 .
6.3. Динамика гармонических колебаний
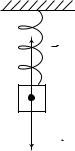
Получим дифференциальное уравнение гармонических колебаний из уравнений, описывающих колебательный процесс. Рассмотрим колебания пружинного маятника — груза массой т, подвешенного на идеальной невесомой пружине жесткостью k (рис. 6.4). На
º |
|
такой груз действуют сила тяжести m g |
и сила упругости растяну- |
º
той пружины Fупр . В положении равновесия модули этих сил одинаковы: mg = Fупр . Если обозначить через l статическое растяже-
ние пружины от недеформированного состояния, то, согласно закону Гука, в положении равновесия Fупр = k l = mg. При выведении груза
из положения равновесия модуль силы упругости изменяется с учетом деформации пружины. Растянем пружину вниз на длину х, тогда Fупр = k ( l + x ). Если пренебречь действием сопротивления воз-
духа, то при отпускании груза он начнет совершать гармонические колебания. Докажем это. Уравнение второго закона Ньютона для
груза можно записать следующим образом:
ma = mg – Fупр = mg – k ( l + x ) = = mg – k l – kx = – kx.
Fупр
m
Поскольку a = d 2x/d t2, то из этого уравнения получаем:
d2x |
|
k |
|
|
-------- |
+ |
--- |
(6.5) |
|
d t |
2 |
m x = 0 . |
||
|
|
|
|
|
|
|
Если рассматривать смещение груза от положения |
|
mg |
|||
|
|||
|
|
равновесия в качестве параметра колебаний, то урав- |
|
Рис. 6. 4 нение (6.5) совпадает с дифференциальным уравне-
78

нием (6.3), т.е. является уравнением собственных колебаний пружинного маятника. Частота собственных колебаний
ω0 = k ⁄ m . |
(6.6) |
При отсутствии трения пружинный маятник колеблется по гармоническому закону с периодом T = 2π
 m ⁄ k .
m ⁄ k .
Рассмотрим физический маятник — твердое тело, которое совершает колебания под действием силы тяжести вокруг неподвижной оси, не проходящей через центр тяжести тела и называемой осью качания маятника (рис. 6.5). Центр тяжести маятника совпадает с его центром масс С. Точка О пересечения оси качания маятника с вертикальной плоскостью, проходящей через центр тяжести маятника, называется точкой подвеса маятника. Если пренебречь силами трения в подвесе маятника и силой трения о воздух, то момент относительно оси качания создает только сила тяжести
mº . При отклонении маятника на угол α от положения равновесия g
момент силы численно равен mg l sin α, где l — расстояние между центром масс и точкой подвеса. Этот момент возвращает маятник в положение равновесия, поэтому его направление противоположно угловому перемещению. Тогда основное уравнение динамики вращательного движения (4.16) для физического маятника имеет вид:
d2 |
α |
= – mgl sin α , |
--------- |
||
Iz |
2 |
|
d t |
|
|
где Iz — момент инерции маятника относительно оси качания.
 Z
Z
O |
α |
Мmg |
αlпр
l
C
O1
 mg
mg
Рис. 6. 5
79

Рассматривая малые колебания тела, при которых sin α ≈ α, получаем уравнение
d2α |
|
mgl |
α = 0 , |
|
--------- |
+ |
--------- |
(6.7) |
|
d t 2 |
Iz |
т.е. угол α удовлетворяет дифференциальному уравнению гармонических колебаний (6.3). Следовательно, при отсутствии трения малые колебания физического маятника являются гармоническими, причем в уравнении колебаний в качестве параметра колебаний выступает угол отклонения маятника от положения равновесия.
Частота собственных колебаний физического маятника
ω0 = mgl ⁄ Iz , |
(6.8) |
период колебаний T = 2π  Iz ⁄ (mgl) .
Iz ⁄ (mgl) .
«Материальная точка», подвешенная на невесомой нерастяжимой нити, совершающая колебания в вертикальной плоскости под действием силы тяжести, называется математическим маятником. Математический маятник — частный случай физического маятника, вся масса которого сосредоточена в его центре масс, так что
Iz = ml 2, поэтому для математического маятника
ω0 = g ⁄ l , T = 2π l ⁄ g . |
(6.9) |
Если сопоставить (6.8) и (6.9), то видно, что математический маятник с длиной нити подвеса lпр = Iz ⁄ (ml) имеет тот же период
колебаний, что и физический маятник массой т, моментом инерции Iz и расстоянием между точкой подвеса и центром масс l. Длина
математического маятника, имеющего тот же период колебаний, что и данный физический маятник, называется приведенной длиной физического маятника. Точка О1, лежащая на прямой ОС на
расстоянии lпр от точки подвеса маятника (рис. 6.5), называется
центром качаний маятника. Центр качаний и точка подвеса обладают свойством взаимности: если маятник подвесить так, чтобы его ось качаний проходила через точку О1, то точка О будет совпадать с
новым центром качаний маятника, т.е. приведенная длина и период колебаний маятника останутся прежними.
80