Материал: Обоснование и создание циклического гидропривода станочного оборудования с атоматическиим управлением
![]()
![]()
![]() ;
;
Уравнение
неразрывности:
![]()
![]() (3.16)
(3.16)
![]()
![]()
![]() (3.18)
(3.18)
![]() (3.19)
(3.19)
где
![]()
![]() - модуль
упругости рабочей жидкости.
- модуль
упругости рабочей жидкости.
Принимая
![]()
![]() (где
(где ![]()
![]() -
скорость жидкости в сечении 3, отнесенная к площади поршня в поршневой полости
ГЦ), а также учитывая, что
-
скорость жидкости в сечении 3, отнесенная к площади поршня в поршневой полости
ГЦ), а также учитывая, что ![]()
![]() и
и ![]()
![]() ,
уравнения (3.16)-(3.18) с учетом (3.19) приводятся к виду:
,
уравнения (3.16)-(3.18) с учетом (3.19) приводятся к виду:
![]()
![]() (3.20)
(3.20)
![]()
![]() (3.21)
(3.21)
![]()
![]() (3.22)
(3.22)
При
рассмотрении динамики редукционного клапана можно пренебречь силами сухого и
жидкостного трения в золотнике, так как они значительно меньше сил
гидравлического сопротивления демпфирующих отверстий. Считая положительным
перемещением золотника перемещение направленное в сторону увеличения проходного
сечения рабочей щели, уравнение равновесия золотника редукционного клапана
можно записать в виде [13].
 (3.23)
(3.23)
Давление в полостях редукционного клапана могут быть
определены по формулам:
![]()
![]() (3.24)
(3.24)
![]()
![]() (3.25)
(3.25)
![]()
![]() (3.26)
(3.26)
Здесь
![]()
![]() ,
, ![]()
![]() ,
,![]()
![]() -
коэффициенты потерь на вязкое трение в канале управления и демпфирующих
отверстиях.
-
коэффициенты потерь на вязкое трение в канале управления и демпфирующих
отверстиях.
Полагая
в них ламинарный режим течения жидкости, коэффициенты Rpiможно
определить как [13]:

где
![]()
![]() и dpi- соответственно длина и диаметр участков канала
управления или демпфирующих отверстий.
и dpi- соответственно длина и диаметр участков канала
управления или демпфирующих отверстий.
Сила
упругости пружины:
![]()
![]() (3.27)
(3.27)
где
![]()
![]() -
предварительное сжатие пружины при закрытом проходном сечении клапана.
-
предварительное сжатие пружины при закрытом проходном сечении клапана.
Осевая
составляющая реактивной гидродинамической силы может быть определена как [13]:
![]()
где
![]()
![]() -
"жесткость" от реакции гидродинамической силы, которая для кольцевого
проходного сечения может быть определена по формуле:
-
"жесткость" от реакции гидродинамической силы, которая для кольцевого
проходного сечения может быть определена по формуле:
![]()
где
![]()
![]() - угол
между направлением действия гидродинамической силы и осью золотника. Для
кольцевых проходных сечений при прямоугольной кромке золотника
- угол
между направлением действия гидродинамической силы и осью золотника. Для
кольцевых проходных сечений при прямоугольной кромке золотника ![]()
![]() = 69°.
= 69°.
Учитывая
(3.7), после некоторых преобразований получаем:
 (3.28)
(3.28)
 (3.29)
(3.29)
Подставив
выражения (3.24) - (3.28) в уравнение (3.23) и обозначив![]()
![]() а также
учитывая, что
а также
учитывая, что![]()
![]() и
и 
![]() получаем
уравнение равновесия золотника редукционного клапана в виде:
получаем
уравнение равновесия золотника редукционного клапана в виде:

 (3.30)
(3.30)
Необходимо
учесть, что золотник редукционного клапана перемещается лишь при выполнении
условия:
где
![]()
![]() - максимальное
возможное открытие рабочей щели клапана. Если выполняется условие
- максимальное
возможное открытие рабочей щели клапана. Если выполняется условие ![]()
![]() < 0,
то необходимо принять
< 0,
то необходимо принять ![]()
![]() = 0.
= 0.
Аналогично
для подпорного клапана можно записать:
 (3,31)
(3,31)
 (3,32)
(3,32)
 (3.33)
(3.33)
![]() (3.34)
(3.34)
 (3.35)
(3.35)
 (3.36)
(3.36)
где
![]()
![]() -
коэффициент потерь на вязкое трение в канале управления;
-
коэффициент потерь на вязкое трение в канале управления;
![]()
![]() ,
, ![]()
![]() -соответственно
длины и диаметры участков канала управления;
-соответственно
длины и диаметры участков канала управления;
![]()
![]() -сжатиепружины
при совпадении рабочих кромок золотника и корпуса.
-сжатиепружины
при совпадении рабочих кромок золотника и корпуса.
Подставив
выражения (3.32)-(3.35) в уравнение (3.31) и обозначив![]()
![]() , а также
учитывая, что
, а также
учитывая, что 
![]() получаем
уравнение равновесия золотника подпорного клапана в виде:
получаем
уравнение равновесия золотника подпорного клапана в виде:
 (3.37)
(3.37)
При
БП клапан, как правило, полностью открыт. Золотник клапана начинает
перемещаться в сторону закрытия рабочей щели при выполнении условия:
 (3.38)
(3.38)
Если
выполняется условие ![]()
![]() <О
т.е. клапан закрыт, необходимо при расчете принять
<О
т.е. клапан закрыт, необходимо при расчете принять ![]()
![]() 0.
0.
Давление
на входе в подпорный клапан определяется по формуле:
 (3.39)
(3.39)
Связь между перемещением золотника УГУ и перемещением стола определяется формулой (3.1).
С помощью разработанной модели можно произвести расчет переходных характеристик в процессе торможения, построить диаграммы переходного процесса при различных значениях параметров гидропривода, исследовать влияние значений этих параметров на характеристики гидропривода, выбрать оптимальные и произвести синтез управляющего гидроустройства с регулятором. Ввиду сложности системы полученных уравнений решение ее аналитически затруднено, поэтому применяем численные методы. Приведенная система уравнений может быть применена и для исследования УГУ без регулятора.
В
качестве примера приведены диаграммы переходных процессов при торможении УГУ
без регулятора (рисунок3.1 а) и с регулятором (рисунок 3.1 б), на основании
которых можно сделать вывод, что применение УГУ с регулятором позволяет
существенно уменьшить разброс координаты остановки стола (с 1,99 мм до 0, 22
мм) и нестабильность скорости установившегося движения (с 17,8% до 2,1%) при
изменении давления питания в диапазоне 4…5МПа.
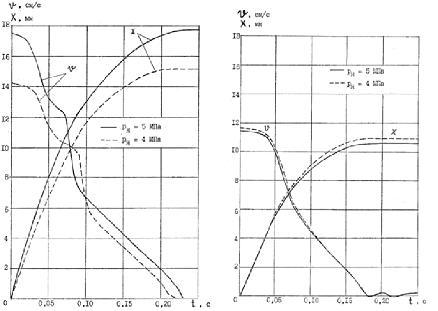
а б
Рисунок 3.1 - Диаграммы переходного процесса гидропривода с УГУ без
регулятора (а) и с регулятором (б) при различных давлениях питания.
4. Исследование влияния параметров гидропривода на его динамические характеристики
Процесс перемещения механизмов станков или роботов состоит, как правило,
из следующих переходов: разгон от скорости, равной 0, до скорости
установившегося движения, перемещение с установившейся скоростью и замедление
(торможение) перед остановкой в конечном положении или переходом на меньшую
скорость рабочей подачи. Для предотвращения или ограничения ударов в процессе
разгона и торможения необходимо ограничить возникающие при этом ускорения. На
рисунке 4.1 показан цикл работы гидропривода.
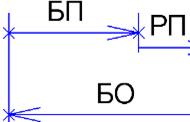
Рисунок 4.1 - Цикл работы гидропривода
Опыт эксплуатации гидроприводов показывает, что их разгон вследствие упругости рабочей жидкости происходит достаточно плавно, без ударов и рывков. С другой стороны, при торможении рабочих органов требуется введение дополнительного управляющего тормозного устройства, параметры которого выбираются на основании динамического расчета.
Динамический расчет производится для процесса торможения рабочего органа при переключении с БП на РП или при его остановке после БП или БО (в зависимости от типа оборудования) и включает две задачи: синтез и анализ [28]. Задача синтеза заключается в определении характеристики управляющего (тормозного) гидроустройства (УГУ) (рисунок 4.2), исходя из требуемого закона движения выходного звена ГД, подборе необходимых формы и размеров подвижного УГУ.
Задача анализа заключается в определении закона движения выходного звена ГД при известной геометрической характеристике УГУ (рисунок 4.3).
В данной работе рассмотрен синусоидальный закон движения. Геометрическая характеристика УГУ - это зависимость площади проходного сеченияfy устройства от перемещения z его подвижного элемента, т.е.fy = f(z) (рисунок 4.2).
Динамический расчет ГП основан на рассмотрении дифференциальных уравнений
его движения [29].
Рисунок 4.2 - Геометрическая характеристика управляющего гидроустройства
Рисунок 4.3 - Закон движения выходного звена гидродвигателя
На рисунке 4.4 приведена диаграмма переходного процесса БП-РП, рассчитанная при следующих значениях параметров:
![]()


![]()

![]()
Значение площадей определяем расчетным путем, задаваясь величинами подач.
Значения остальных параметров приведены на рисунке 4.4.
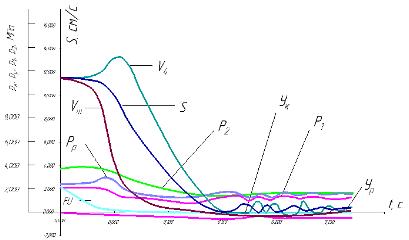
Рисунок 4.4 - Диаграмма переходного процесса БП-РП
= 100 мм/мин; р = 4,6 МПа; V = 0,7 10см; V = 2,6 10см; μ = 0,6; m = 5000 кг; р = 1,7 МПа; р = 0,3 МПа; к = 2,2 МПа см с; m = 4700 кг;α = 30; к = 0,017 МПа см с.
Анализ кривых переходного процесса показывает, что в начальной стадии
происходит некоторое повышение редуцированного давления, связанное с
запаздыванием срабатывания редукционного клапана, а также падение давления в полостях
ГЦ. Последнее явление вызывает расширение жидкости в полостях ГЦ и
присоединенных к ним исполнительных гидролиниях. Существенное различие между
значениями свидетельствует о сильном влиянии сжимаемости жидкости на переходный
процесс. Возрастание редуцированного давления и расширение жидкости приводят к
тому, что, несмотря на резкое уменьшение площади проходного сечения рабочей
щели УГУ, скорость стола в начальной стадии уменьшается очень медленно и только
после того, как площадь определяется только треугольными пазами и
восстанавливается перепад давления на рабочей щели УГУ (когда падает), скорость
стола начинает быстро уменьшаться. В конце переходного процесса наблюдаются
колебания скорости стола и давления, которые вызываются колебаниями золотника клапана
давления. Переходный процесс сопровождается также колебаниями давления на входе
в систему.
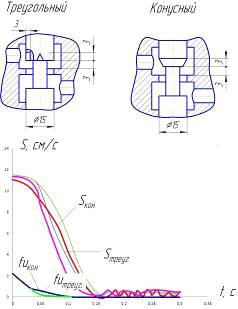
Рисунок 4.5 - Диаграмма переходного процесса БП-РП при разных геометрических характеристиках УГУ
На рисунке 4.5-4.7 приведены расчетные диаграммы переходных процессов БП-РП при разных значениях параметров привода. Анализ этих диаграмм показывает, что наибольшее влияние на закон движения стола оказывает геометрическая характеристика УГУ (рисунок 4.5), угол наклона кулачка управления (рисунок 4.6).
Угол наклона кулачка определяет в основном величину модуля ускорения
стола (рисунок 4.6). Так как при увеличении модуль ускорения возрастает, это
приводит к появлению колебаний стола.
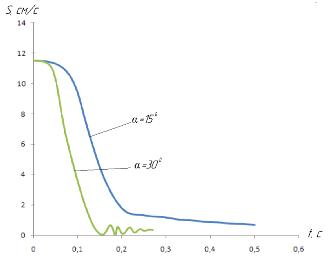
Рисунок 4.6- Диаграмма переходного процесса БП-РП при разных величинах
угла наклона рабочей поверхности кулачка управления
Влияние величины РП сказывается только в нижней части диапазона подач (рисунок 4.7). Если при больших подачах кривая скорости имеет плавный монотонный характер, то при малых подачах наблюдается колебание скорости в конце переходного процесса. Это можно объяснить влиянием падающей характеристики трения, которое проявляется в большей степени при малых РП.