Материал: Обоснование и создание циклического гидропривода станочного оборудования с атоматическиим управлением
Способы торможения выходного звена гидродвигателя.
Процесс перемещения механизмов станков состоит, как правило, из следующих этапов: разгон от скорости, равной 0, до скорости установившегося движения; перемещение со скоростью установившегося движения νу (ωу) и замедление скорости (торможение) перед остановкой в конечном положении или переходом на меньшую скорость рабочей подачи (рисунок 2.1).
На рисунке 2.1 обозначено: ν, ω - линейная и угловая скорости; a, ε
- линейное и угловое
ускорения; t - время.
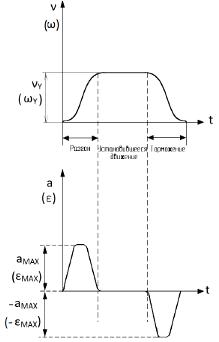
Рисунок 2.1 - Закон движения выходного звена гидродвигателя
Для предотвращения или ограничения ударов в процессе разгона и торможения необходимо ограничивать возникающее при этом ускорение.
Опыт эксплуатации гидроприводов станков и роботов показывает, что их разгон вследствие упругости масла происходит достаточно плавно без ударов и рывков. Поэтому при проектировании большинства гидросистем нет необходимости предусматривать какие-либо дополнительные устройства, ограничивающие величину ускорения при разгоне. С другой стороны, при торможении рабочих органов значительного веса и движущихся с большой скоростью требуется установка специальных устройств. Известно несколько способов торможения:
) за счет изменения характеристики насосной установки;
) за счет изменения эффективной площади поршня гидроцилиндра;
) за счет изменения структуры гидросистемы;
) за счет преднамеренного увеличения внешней нагрузки.
Но наиболее распространен 5-й способ, при котором торможение происходит за счет изменения гидравлического сопротивления гидролиний. Торможение привода по требуемому закону осуществляется вследствие перемещения подвижного элемента в тормозном устройстве.
Здесь различают два способа управления торможением:
по пути;
по времени.
При управлении по пути подвижный элемент управляющего гидроустройства (УГУ) перемещается от поршня ГЦ или от вала ГМ через передаточный механизм. При управлении по времени подвижный элемент УГУ перемещается специальным приводом, имеющим свой собственный закон движения (распределитель с электроуправлением, с гидроуправлением и т.д.). Конструктивно управляющие устройства (УГУ) можно выполнить следующим образом:
) в отдельном корпусе;
) объединить с реверсивным распределителем;
) объединить с гидродвигателем.
Первые два вида могут быть применены и для ГД вращательного движения, последний − только для ГЦ.
УГУ выполнено в отдельном корпусе (рисунок 2.2).
При управлении торможением по пути (рисунок 2.2 а) процесс торможения начинается после воздействия кулачка 1, установленного на штоке ГЦ (2) или на валу ГМ, на ролик 3 УГУ; золотник 4, перемещаясь вниз, перекрывает проход жидкости, вытесняемой из полости 5.
При управлении торможением по времени в необходимый момент флажок Ф
входит в паз конечного выключателя ВК, замыкая его электрическую цепь, после
чего подается сигнал на включение вспомогательного привода ВП, который и
перемещает золотник УГУ. В качестве ВП чаще всего используется электромагнит.
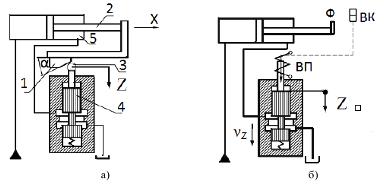
Рисунок 2.2 - Схемы торможения выходного звена гидродвигателя: а) при
управлении по пути; б) при управлении по времени
Второй способ позволяет осуществлять дистанционное управление торможением, поэтому УГУ располагают обычно на насосной установке. При этом цепь управления содержит большое число промежуточных элементов, каждый из которых имеет свой разброс времени срабатывания. В результате общий разброс времени срабатывания достигает значительной величины, а это приводит к большому разбросу координаты остановки рабочего органа и, как следствие, к снижению производительности оборудования и снижению стабильности времени цикла. Управление торможением по пути позволяет устранить указанные недостатки, но при этом управляющее гидроустройство должно располагаться на станке, что несколько усложняет конструкцию привода.
циклический станочный автоматический гидропривод
3. Математическая модель циклического гидропривода с автоматическим регулятором
В настоящее время происходит интенсификация работы машин, что приводит к одновременному увеличению скоростей и масс движущихся частей. Но при значительных массах невозможно повысить скорость движения, если не обеспечить требуемый закон торможения.
К управляемому гидроустройству предъявляется следующие основные требования:
минимальное время приходного процесса;
отсутствие ударов, отскоков и колебаний рабочего органа;
ограничение экстремальных давлений в гидросистеме;
высокая стабильность координаты остановки рабочего органа.
Для выполнения этих требований при проектировании управляющего гидроустройства (УГУ) необходимо произвести расчет его геометрической характеристике, исходя из заданного закона движения рабочего органа, подобрать форму и размеры его рабочего элемента и выполнить анализ движения рабочего органа при использовании разработанного УГУ.
С целью стабилизации характеристики торможения в условиях изменяющихся параметров целесообразно применять управляющее гидроустройство с автоматическим регулятором, который поддерживает постоянный перепад давления на рабочей дросселирующей щели [4].
Синтез управляющего гидроустройства может быть выполнен на основе математической модели, которая представляет собой систему алгебраических и дифференциальных уравнений.
Под математической моделью понимается описание реальной физической системы, в данном случае привода, в котором некоторые математические объекты и отношения между ними связаны правилами соответствия с элементами этой системы и отношениями между ними и содержат в простом и удобном виде информацию о наиболее существенных (в том числе и неизвестных) свойствах системы [14].
В данном случае модель относится к классу динамических систем, так как она описывает изменение параметров во времени.
При составлении уравнений движения ГП приняты следующие допущения:
Величина утечек пренебрежимо мала по сравнению с расходами жидкости в полостях ГЦ.
Расходы жидкости через дроссели РП отсутствуют, так как при исследовании стабильности координаты точки перехода стола с БП на РП они обычно закрываются полностью.
Влияние сжимаемости жидкости в каналах, соединяющих УГУ с редукционным клапаном и дросселями пренебрежимо мало, поэтому используем Г-образную схему для замещения исполнительных линии, соединяющих УГУ с ГЦ.
Давление питания постоянно во время переключения.
Инерционные перепады давления в линиях пропорциональны ускорению поршня ГЦ, что допустимо при отсутствии резких колебаний давления.
Потери давления в местных сопротивлениях и силу трения в направляющих стола и уплотнениях ГЦ определяем по полученным экспериментально зависимостям и аппроксимируем их многочленами второй степени, так как они наиболее удобны для исследования и дают достаточную точность.
Принимая за основу гидравлическую схему путевого управления переключением скорости силового стола при переходе с БП на РП с УГУ с регулятором, установленным в напорной линии при дифференциальном включении цилиндра, добавив в нее подпорный клапан, устанавливаемый обычно на выходе из ГЦ, с учётом принятых допущений расчетную схему ГППУ можно представить в виде, показанном на рисунке 3.
На схеме (рисунок 3.1) приняты следующие обозначения:
Рисунок 3.1 - Расчетная схема УГУ с автоматическим регулятором
где m - масса подвижных частей;
х, ν, а - перемещение, мм; скорость, м/сек; ускорение поршня, м/сек2;
Рн - давление в напорной линии;
р1,р2 - давление в полостях гидроцилиндра, МПа;
F1,F2 - эффективные площади гидроцилиндра, м2;
V1,V2 - объемы полостей гидроцилиндра с присоединенным к ним исполнительным линиям, м3;
Т - сила трения в направляющих стола и уплотнениях поршня ГЦ, Н;
Рр - редуцированное давление, МПа;
Fр1, Fр2, Fр3 - эффективные площади золотника в полостях управления редукционного клапана,м2;Р, dР, уР, UР - масса, кг; диаметр, мм; перемещение, мм и скорость золотника редукционного клапана, м/сек;Р - открытие рабочей щели редукционного клапана в установившимся режиме;
еПР, NПР - жесткость и сила пружины редукционного клапана;Р1, pР2, pР3 - давления в полостях редукционного клапана, МПа;ГР - осевая составляющая реактивной гидродинамической силы в редукционном клапане;У, Q4 - расходы жидкости соответственно в напорной и сливной линиях, м3/сек;С1, QС2 - расходы жидкости, определяемые сжимаемостью ее в поршневой и штоковой полостях ГЦ и присоединенных к ним исполнительных линиях, м3/сек;У - площадь проходного сечения рабочей щели УГУ,м2;
z - перемещение золотника УГУ, мм.
Уравнение движения силового стола ГЦ:
m·a = P1·F1 - P2·F2 - T, (3.1)
Уравнения связи между давлениями:
![]()
![]() , МПа;
(3.2)
, МПа;
(3.2)
![]()
![]() , МПа;
(3.3)
, МПа;
(3.3)
![]()
![]() (3.4)
(3.4)
![]()
![]() , МПа;
(3.5)
, МПа;
(3.5)
где![]()
![]() -
суммарные потери давления в гидроаппаратах, площадь проходного сечения которых
не изменяется в процессе торможения, соответственно для напорной линии и линии
2-1, МПа;
-
суммарные потери давления в гидроаппаратах, площадь проходного сечения которых
не изменяется в процессе торможения, соответственно для напорной линии и линии
2-1, МПа;
![]()
![]() - потери
давления в редукционном клапане, МПа;
- потери
давления в редукционном клапане, МПа;
![]()
![]() -
инерционные перепады давления в напорной линии (н-3) и линиях, присоединенных
соответственно к поршневой (3-1) и штоковой (2-3) полостям ГЦ, МП. Потери
давления в каналах подпорного клапана учитываются в
-
инерционные перепады давления в напорной линии (н-3) и линиях, присоединенных
соответственно к поршневой (3-1) и штоковой (2-3) полостям ГЦ, МП. Потери
давления в каналах подпорного клапана учитываются в ![]()
![]() .
.
Потери
давления в соответствии с принятыми допущениями можно определить по формулам:
![]()
![]() (3.6)
(3.6)
 ;
; 
 ; (3.7)
; (3.7)
![]()
![]() (3.8)
(3.8)

где
![]()
![]() постоянные
коэффициенты, определяемые на основании экспериментальных данных или по справочным
таблицам [15];
постоянные
коэффициенты, определяемые на основании экспериментальных данных или по справочным
таблицам [15];
![]()
![]() -
удельный вес рабочей жидкости;
-
удельный вес рабочей жидкости;
![]()
![]() -
коэффициенты расхода соответственно в редукционном и подпорном клапанах; g -
ускорение свободного падения;
-
коэффициенты расхода соответственно в редукционном и подпорном клапанах; g -
ускорение свободного падения;
![]()
![]() длины и
площади проходных сечений прямых и выпрямленных участков линий н-3, 3-1, 2-3;
длины и
площади проходных сечений прямых и выпрямленных участков линий н-3, 3-1, 2-3;
![]()
![]() - числа
участков в линиях.
- числа
участков в линиях.
Коэффициенты
аппроксимирующих зависимостей потерь давления в линиях от расхода можно
подсчитать по формулам [15]:
где
![]()
![]() и
и ![]()
![]() -
номинальный расход и потери давления при номинальном расходе, которые
определяются экспериментально для каждого аппарата, а для нормализованных
гидроаппаратов приведены в справочниках [19]. Сила трения:
-
номинальный расход и потери давления при номинальном расходе, которые
определяются экспериментально для каждого аппарата, а для нормализованных
гидроаппаратов приведены в справочниках [19]. Сила трения:
![]()
![]() ; (3.9)
; (3.9)
Причем:
![]()
![]()
где
![]()
![]() -
критическое значение скорости стола, при котором смешанное трение уступает
место жидкостному;
-
критическое значение скорости стола, при котором смешанное трение уступает
место жидкостному;
![]()
![]() , Аж,
Кс, Ас, Вс - коэффициенты аппроксимирующих
зависимостей коэффициента трения от скорости стола соответственно для участка
жидкостного (индекс "ж") и смешанного (индекс "с") трения,
определяемые на основании экспериментальной или расчетной характеристик трения.
, Аж,
Кс, Ас, Вс - коэффициенты аппроксимирующих
зависимостей коэффициента трения от скорости стола соответственно для участка
жидкостного (индекс "ж") и смешанного (индекс "с") трения,
определяемые на основании экспериментальной или расчетной характеристик трения.
Принимая
![]()
![]()
(где
![]()
![]() и
и ![]()
![]() -
скорости жидкости в линиях н-3 и 2-3, отнесенные соответственно к площади штока
и площади поршня в штоковой полости ГЦ), уравнения (3.1)-(3.5) с учетом
зависимостей (3.6)-(3.9) приводятся к виду:
-
скорости жидкости в линиях н-3 и 2-3, отнесенные соответственно к площади штока
и площади поршня в штоковой полости ГЦ), уравнения (3.1)-(3.5) с учетом
зависимостей (3.6)-(3.9) приводятся к виду:
 (3.10)
(3.10)
![]()
![]() (3.11)
(3.11)
 (3.12)
(3.12)
 (3.13)
(3.13)

![]()
![]() -
коэффициенты, зависящие от знаков скоростей соответственно
-
коэффициенты, зависящие от знаков скоростей соответственно ![]()
![]() и
и ![]()
![]()