Материал: Обоснование и создание циклического гидропривода станочного оборудования с атоматическиим управлением
Вследствие того, что многие нагруженные исполнительные устройства имеют сходное математическое описание, представляется возможным разработать единую методику их аналитического проектирования.
При проектировании исполнительного устройства особенно большое значение имеет правильный выбор силового элемента.
Здесь необходимо подчеркнуть различие в исходных данных, которые необходимы для выбора обычных приводных двигателей, используемых в качестве силовых элементов в СДР. Обычно достаточно полной характеристикой приводного двигателя является его номинальная мощность в определенном режиме (при номинальной скорости). Иногда необходимо знать зависимость крутящего момента от скорости при скоростях, мало отличающихся от номинальных. И только в случае тяговых двигателей требуется располагать зависимостью вращающего момента от скорости для всех возможных значений скорости; при этом поворот ротора двигателя не представляет интереса, так как вращающий момент, по крайней мере, в первом приближении от него не зависит. В случае же силовых элементов исполнительных устройств САР для их выбора и расчета необходима гораздо более полная информация, так как требуется знание их свойств не только в установившемся, но и переходном режиме, поэтому необходимо располагать:
а) характеристикой, представляющей собой зависимость вращающего момента от скорости для всех значений скорости от нулевой до максимальной;
б) семейством таких характеристик для различных значений управляющего сигнала;
в) характеристиками в переходном режиме (передаточной функцией) схемы управления;
г) значениями момента инерции и коэффициента трения подвижных частей (причем всегда желательно, чтобы момент инерции был возможно меньшим).
Требования к исполнительному устройству, как к элементу CAP, обычно сводятся к тому, чтобы он обеспечил определенную амплитуду колебаний на выходе при изменении частоты входного сигнала в заданном диапазоне частот и имел желаемую статическую точность [2].
При непрерывно возрастающих требованиях к диапазону и точности управления процессами существенное значение имеет исследование работы исполнительных устройств на нижнем пределе диапазона регулирования, когда особенно важно учитывать влияние разного рода нелинейных характеристик.
Исполнительные устройства воздействуют на регулирующие органы при помощи
механических передач, поэтому при выборе, расчете и проектировании
исполнительных устройств необходимо располагать сведениями о характеристиках и
конструкции последних.
.1 Схемы и конструкции циклических гидроприводов станочного оборудования
Гидравлические приводы автоматизированных станков и роботов подразделяются на два основных класса:
− детерминированные (или циклические);
− информационные (или ациклические).
Среди приводов второго класса наиболее распространены следящие.
Рассмотрим некоторые из типовых схем силовой части циклических
гидроприводов с простым и дифференциальным включением гидроцилиндра (рисунок
1.2).
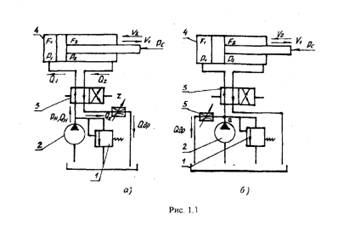
Рисунок 1.2 - Типовая схема циклического гидропривода: а -дроссель на выходе; б - с параллельным включением дросселя
Для всех схем при установившемся движении движущее усилие Рдв
равно усилию сопротивления Рс, включающему все силы, приложенные к
штоку [2]. Рассмотрим схему с 4-кромочным золотником с открытыми щелями в
среднем положении (рисунок 1.3). В положении «стоп» (рисунок 1.3 а) оба
электромагнита выключены и золотник под действием пружин центрируется в среднем
положении. Жидкость от насоса свободно через открытые щели распределителя
сливается в бак [3].
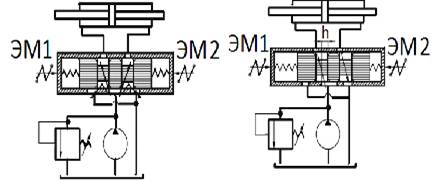
Рисунок 1.3 - Схема циклического гидропривода; а - в положении «СТОП»; б
- при движении вперед
Для осуществления движения вперед (ДВ) необходимо включить электромагнит ЭМ1, золотник смещается вправо, и жидкость от насоса поступает в левую полость ГЦ, поршень движется вправо, а жидкость, вытесняемая из правой полости ГЦ, сливается в бак. Аналогично реализуется движение назад (ДН), только в этом случае следует включить электромагнит ЭМ2. Величина перемещения золотника h из нейтрального положения составляет несколько миллиметров.
Для защиты привода от ударов и динамических нагрузок во время переходных процессов «ДВ - стоп», «ДН - стоп», необходимо так выполнить тормозную кромку золотника или обеспечить такой закон перемещения золотника, чтобы осуществить заданный закон торможения. Рассмотрим схему и принцип действия циклического гидропривода, работающего по более сложному циклу: «быстрый подвод (БП) - рабочий ход (РХ) - быстрый отвод (БО) - стоп» (рисунок 1.4).
Для защиты привода от ударов и динамических нагрузок во время переходных
процессов «ДВ - стоп», «ДН - стоп», необходимо так выполнить тормозную кромку
золотника или обеспечить такой закон перемещения золотника, чтобы осуществить
заданный закон торможения. Рассмотрим схему и принцип действия циклического
гидропривода, работающего по более сложному циклу: «быстрый подвод (БП) - рабочий
ход (РХ) - быстрый отвод (БО) - стоп» (рисунок 1.4).
Рисунок 1.4 - Конструктивная схема циклического гидропривода станка
Этот вариант цикла является наиболее распространенным для станков.
На схеме обозначены: ГЦ - гидроцилиндр; ЛП, ПП - левая и правая полости ГЦ; РР - реверсивный распределитель; РБХ - распределитель быстрых ходов; Р, А, В, Т - линии распределителей; ДРХ, ДБХ - дроссели регулирования скоростей соответственно рабочего и быстрого ходов; Н - насос; КП - переливной клапан; КО - обратный клапан; ЭМ1, ЭМ2 - электромагниты; Ф1, Ф2 - флажки управления; ВК1, ВК2 - конечные выключатели; К - кулачок управления; Б - гидробак [3].
В данном варианте ГП применяются дроссельное регулирование скорости и электрическое управление. Привод работает следующим образом.
Для осуществления быстрого подвода от кнопки «Пуск» (П) включается электромагнит ЭМ1, золотник распределителя РР смещается вправо (по схеме), включается позиция I, распределитель РБХ остается в исходной позиции (0). Потоки жидкости движутся следующим образом:
Скорость БП регулируется дросселем ДБХ (на входе). Дроссель ДРХ, хотя и пропускает жидкость, практически не влияет на скорость, т. к. основной поток жидкости идет через РБХ. Излишки жидкости, поступающие от насоса, сливаются в бак через переливной клапан КП. В конце БП кулачок К нажимает своей рабочей поверхностью на ролик золотника РБХ и, преодолевая усилие пружины, смещает его вниз (по схеме), включается позиция I, начинается рабочий ход РХ. Скорость РХ определяется настройкой дросселя ДРХ (на выходе), т.к. второй дроссель (ДБХ) настроен на больший расход, соответствующий быстрым ходам. В конце РХ флажок Ф1 входит в паз конечного выключателя ВК1, замыкая электрическую цепь, срабатывают соответствующие элементы электрической системы управления, в результате выключается электромагнит ЭМ1 и включается электромагнит ЭМ2, золотник распределителя РР смещается влево (по схеме), включается позиция II, начинается быстрый отвод (БО).
Скорость БО определяется настройкой дросселя ДБХ. После того, как кулачок К освободит золотник распределителя РБХ (в момент, соответствующий точке М на схеме цикла),последний под действием пружины переместится вверх (по схеме) и включится позиция О, начнется движение потока жидкости и через РБХ.
В конце БО флажок Ф2 входит в паз выключателя ВК2, замыкая электрическую цепь, и через систему управления формируется сигнал на выключение электромагнита ЭМ2, под действием пружин золотник РР центрируется в средней позиции О, поршень ГЦ останавливается в исходном положении («стоп»).
Наиболее известные производители в сфере гидравлического оборудования на
данный момент «Vickers» и «Duplomatic» также занимались разработкой
гидравлических схем и гидропанелей. Разработанные этими фирмами гидравлические
схемы отличаются простотой и имеют малую металлоемкость. Одна из разработанных
гидравлических схем представлена на рисунке 1.5.
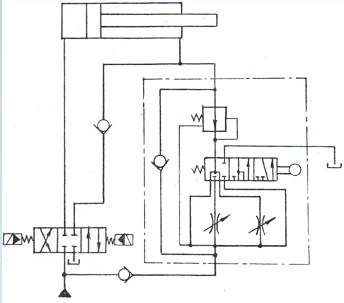
Рисунок 1.5 - Гидравлическая схема привода подачи СC фирм «Vickers» и
«Duplomatic»
Конструкция гидропанели, которая лежит в основе ГППУ, представлена на рисунке 1.6. Она содержит: золотник 1 с путевым управлением от кулачка, редукционный 5 и обратный 6 клапаны и два дросселя 3, 4 регулирования РП, а также управляющее гидроустройство 7. Редукционный клапан регулирует перепад давления не только на дросселях РП, но и на рабочей щели УГУ.
В приводе обеспечиваются две РП и возможность изменения схемы включения
ГЦ с дифференциальной на обычную. Однако в литературе отсутствуют сведения о
величине разброса координаты точки перехода с БП на РП.
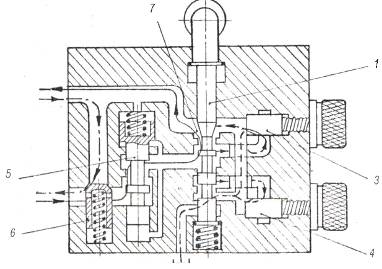
Рисунок 1.6 - Конструкция гидропанели подачи фирмы «Duplomatic»
) установка гидропанели возможна только на выходе из ГЦ, что снижает надежность работы и затрудняет получение малых РП;
) из-за изменения величины утечек на уплотняющих поясках путевого золотника при изменении нагрузки не обеспечивается необходимая стабильность РП;
) из-за конструкции редукционного клапана при малых скоростях ГП, он оказывается неподготовленным к переключению на РП, так как, стремясь поддержать заданный перепад давления на рабочей щели УГУ, он открывается полностью. Это приводит к пикам давления и повышению величины разброса координаты точки перехода стола с БП на РП;
) возможность регулирования скорости ГП не предусмотрена, поэтому для этой цели приходится устанавливать дроссель или заменять золотник 1 (смотри рисунок 1.6).
В справочнике Свешникова «Станочные гидроприводы» разработаны [29] гидропанели путевого управления переключением скорости ПГ36-1 (смотри рисунок 1.7), для реализации цикла движения с двумя рабочими подачами, которые содержат два дросселя 11 и 14, редукционный 28 и обратный 27 клапаны, а также золотник 23 с управлением от кулачка, расположенные в корпусе Y). Дроссели состоят из гильзы 5, втулки 7, винта 6, валика 4. лимба 2. контргайки 3, пробки 9, пружины 8 и переключаемою штифтом 1 указателя оборотов 13 с фиксатором. Кулачок, установленный на рабочем органе, воздействует на золотник через толкатель 16 с роликом 15, размещенные в крышке 12, которая может поворачиваться на 90°. Ход золотника ограничен штифтом 7; наружные утечки исключаются манжетой 18.
При БП рабочего органа масло из отверстия «Подвод» проходит через рабочую кромку редукционного клапана и далее по каналам корпуса и проточкам 21 и 22 отводится в гидросистему через отверстие «Отвод», причем масло под давлением поступает также в канавку 19, связанную с отверстием для дистанционного управления. После переключения золотника в положение первой рабочей подачи (1РП) канавка 19 соединяется с дренажной линией 26, проточки 21 и 22 разъединяются, а проточки 22 и 24 соединяются между собой. При этом масло, прошедшее через редукционный клапан (поддерживает постоянный перепад давлений на дросселях независимо от нагрузки), поступает в отводное отверстие через оба дросселя, включенных параллельно, и подача определяется главным образом настройкой дросселя 14 первой рабочей подачи.
При дальнейшем перемещении золотника в положение второй рабочей подачи (2РП) проточки 22 и 24 разъединяются, а масло проходит в отводное отверстие только через дроссель 11 и канал 20.
Для исключения влияния утечек масла через радиальные зазоры золотника на
стабильность рабочей подачи, в корпусе выполнена специальная канавка 25,
соединенная с выходом из редукционного клапана. Благодаря этому перепад
давлений на уплотняющих поясках золотника, расположенных по обе стороны от
линии отвода, не превышает редуцированного давления (~ 0,25
Рисунок 1.7 - Конструкции (а), зависимость перепала давлений ∆p от
расхода масла Q (6) и Q от перемещения золотника Y (в) для гидропанели 2ПГ36-14
(пунктирной линией показана зависимость для обратного потока (МПа) и поддерживается
постоянным в процессе работы аппарата
Винт 29 позволяет ограничивать скорость БП и одновременно «автоматически» устанавливает золотник редукционного клапана в положение, обеспечивающее минимизацию его хода при торможении рабочего органа, что положительно сказывается на качестве переходного процесса и стабильности точки перехода БП-1РП. При БО масло проходит из отверстия «Отвод» в отверстие «Подвод» через клапан 27.
1.2 Теоретические методы динамического анализа и синтеза гидроприводов с
детерминированным управлением
При детерминированном управлении управляющий сигнал выполняется без всякой свободы выбора, выходящей за пределы установленной жесткой программы, при этом информационные процессы отсутствуют или не играют существенной роли [4], [5].
ГППУ относятся к классу детерминированных приводов [5]. В них установившаяся скорость выходного звена гидродвигателя достигается в одном из фиксированных положений подвижного элемента дроссельного УГУ.
При смене этапов циклограммы подвижный элемент УГУ перемещается в другое фиксированное положение, причем величина перемещения значительна и составляет несколько мм. Скорость становившегося движения настраивается дросселями, а закон ее изменения в переходном процессе при смене этапов циклограммы определяется, главным образом, зависимостью площади проходного сечения рабочей щели УГУ от перемещения его подвижного элемента.
Будем для краткости называть эту зависимость геометрической характеристикой УГУ в детерминированных ГП регуляторы расхода и клапаны давления при переходных процессах играют вспомогательную роль, поддерживая необходимое давление или перепад давления в определенных точках или элементах гидросистемы.
Учитывая эти особенности детерминированного ГП, при его использовании необходимо решить две основные задачи:
Определение закона движения выходного звена гидравлического двигателя и характера изменения отдельных параметров привода (давленийи скоростей течения рабочей жидкости в различных точках гидравлической системы) при известной геометрической характеристике У1У (задачи анализа).
Расчет геометрической характеристики управляющего гидравлического устройства, подбор его формы и размеров, необходимых для обеспечения требуемого закона движения выходного звена гидравлического двигателя (задача синтеза).
На сегодняшний момент представлено несколько вариантов решения данных задач, представлено несколько вариантов решения, но наиболее подробно методы решения рассмотрены в работах Е.А. Цухановой и Н.И. Левитского [5, 6, 7]. Методика, разработанная Е.А. Цухановой и Н.И. Левитским, основана на рассмотрении системы дифференциальных уравнений движения гидропривода, в которую входят следующие уравнения [5]:
уравнение движения выходного звена гидравлического двигателя;
уравнение, описывающее движение золотников управляющего гидравлического устройства;
уравнения передачи мощности, включающие:
уравнения связи между давлениями в различных сечениях магистралей;
уравнения неразрывности;
уравнения на границах гидравлической сети.
Уравнение движения выходного звена гидравлического двигателя
применительно к гидравлическому цилиндру имеет вид:
![]()
![]()
![]() ; (1.1)
; (1.1)