Материал: Методические основы совершенств. транспортных связей в предприя
116
служивание сразу же, не ожидая очереди, N3=1, среднее время пребывания заяв-
ки в очереди можно определить по формуле
tcp = (l/n3) Σtcp.з, |
(4.12) |
где tср.з – время пребывания каждой заявки в очереди; максимальная длина оче-
реди Lмакс = 2; средняя длина очереди может быть определена по формуле
Lcp = (l/T)ΣL*tl, |
(4.13) |
где tl – промежутки времени между отдельными изменениями длины очереди;
L – длина очереди в эти интервалы времени.
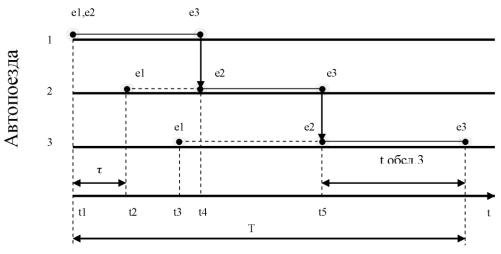
Рис. 4.10. Диаграмма возникновения событий при разгрузке башенным краном трех автопоездов на складах сырья
Для рассматриваемого случая имеем:
Lср = (1/Т) [0(t2 - tl] + l(t3 -t2) + 2( t4 -t3) + l(t5 -t4) + 0(t6 -t5)]. (4.14)
Коэффициент загрузки обслуживающего прибора Кп = 1.
До сих пор мы рассматривали интервалы времени прибытия автопоездов и время их разгрузки как постоянные и стационарные. На практике это не так:
интервалы поступления и время разгрузки обычно носят случайный характер
[17].
Если в результате хронометража было установлено, что автопоезда прибы-
вают под разгрузку с интервалом от 10 до 30 минут, причем в этом интервале одинаково часто встречались близкие к средним и крайним значениям (в этом случае говорят, что любое значение от 10 до 30 минут равновероятно), то мож-
117
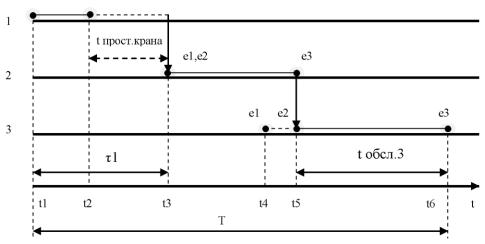
но предположить, что интервалы времени прибытия автопоездов подчиняются нормальному распределению. Будем рассматривать разгрузку трех автопоез-
дов, интервалы времени между прибытием которых и время их обслуживания представлены прибытием автопоездов (т): 0, 18, 11; время разгрузки автопоездов краном (tобсл.): 6, 14, 10. Диаграмма событий в этом случае примет вид
(рис. 4.11):
Рис. 4.11. Диаграмма событий прибытия и времени разгрузки автопоездов краном
Из диаграммы определяем: число заявок, прибывших под разгрузку, nз = 1;
число заявок, которые попали на обслуживание сразу же, не ожидая очереди,
Nз = 2; среднее время пребывания заявки в очереди определяется по формуле
(4.12): tср = (1/1)*3 = 3 мин; максимальная длина очереди Lмакс = 1; средняя дли-
на очереди определяется по формуле (4.13): Lср = (1/42)*3 = 0,071; коэффици-
ент загрузки обслуживающего прибора Кп = 30/40 = 0,75.
Следует отметить, что при учете случайного характера интервалов при-
бытия автопоездов и времени их обслуживания возможны случаи непред-
виденных простоев крана (tпрост) или возникновения очередей автопоездов. По-
этому стремятся, чтобы на протяжении смены средняя длина очереди и коэф-
фициент загрузки были оптимальными. Этого можно достичь, регулируя коли-
чество автопоездов или подбирая кран по производительности. Для обоснован-
118
ного выбора необходимо провести исследования технологического процесса для всех выбираемых систем машин и оборудования, а также их количества с использованием метода моделирования, что существенно сокращает время вы-
числений и затраты. Для исследования технологических процессов транспорта леса могут быть использованы имитационные алгоритмические модели, в ко-
торых основные события (интервалы прибытия автопоездов, время их разгруз-
ки) планируются заранее, а вспомогательные (начало разгрузки автопоезда) яв-
ляются результатом логики, закладываемой в алгоритм модели разработчиком.
Эксперименты с имитационными моделями технологических процессов позво-
ляют определить величины, характеризующие работу транспортной системы за заданный интервал времени (например, среднее число автопоездов в очереди к экрану, коэффициент загрузки крана за одну смену работы). Рассмотренные ранее диаграммы состояний являются наглядным примером реализации имита-
ционных моделей. Общая структура процесса моделирования логистических систем продвижения потоков лесоматериалов [109], относящихся к дискрет-
ным процессам, представлена на рис. 4.12.
Лесотранспортные работы подвержены непосредственному воздействию всего многообразия погодно-климатических факторов, вызывающих законо-
мерные сезонные изменения условий, а следовательно, и эффективности про-
ведения лесотранспортных работ. Погода и климат оказывают непосредствен-
ное воздействие на все элементы системы «оператор» – «лесотранспортная машина» – «ездовая поверхность» и, безусловно, должны быть учтены при ор-
ганизации освоения годового лесосечного фонда лесозаготовительного пред-
приятия (ЛЗП) [61].

119
Рис. 4.12. Структурная схема процесса моделирования
Разработка рациональной стратегии пространственно-временного освоения годового лесосечного фонда ЛЗП является одной из актуальных производст-
венных задач. В условиях современного, динамичного лесного рынка товаров и услуг возникают сложности по определению стоимостных показателей лесо-
сечно-транспортных процессов, наличие нелинейной зависимости этих показа-
телей от объемов производства.
Для решения задачи рациональной организации освоения годового лесо-
сечного фонда, лишенного отмеченных выше недостатков, необходимо исполь-
зовать метод динамического программирования. Этот метод обычно применя-
ется для планирования и управления процессом, когда его жизненный цикл можно разбить на этапы, например, во времени. Нередко такие границы вводят и условно. Сформулируем поставленную задачу в терминах общей задачи ди-
намического программирования [130].
Имеется годовой лесосечный фонд, состоящий из m лесосек с со-
ответствующими запасами ликвидной древесины в лесосеке Qi(i=l,...,m). Каж-
дая лесосека характеризуется грунтово-гидрологическими условиями и транс-
портной доступностью. Последняя определяет наличие и протяженность lki раз-
120
личных дорожных конструкций пути (k = l,...,n) от лесосеки до конечного пунк-
та транспортировки (например, грунтовый ус, гравийная ветка и дорога общего пользования с асфальтобетонным покрытием). Известны также помесячные объемы поставки Vj заготовленного леса на конечный пункт, определяемые
«портфелем заказов» ЛЗП.
Любая из лесосек может быть запланирована в рубку в любой из календар-
ных месяцев года, однако эффективность проведения лесотранспортных работ,
обусловленная климатом региона, будет при этом различна. Известно, напри-
мер, что заболоченные, удаленные от существующих дорог лесосеки наиболее эффективно могут быть освоены в зимнее время, а лесосеки, расположенные на сухих дренирующих грунтах, – летом. Лесосеки, расположенные у дорог с ка-
питальными покрытиями, могут быть эффективно освоены даже в наиболее не-
благоприятный период весной и осенью. Проведение лесосечных работ в каж-
дой лесосеке должно осуществляться в один прием, без календарных переры-
вов. К концу года все лесосеки должны быть освоены, а заготовленный лес вы-
везен на склад сырья [18].
Предполагая, что i-я лесосека планируется в рубку в j-м месяце в объеме
Qij кубометров ликвидной древесины, будем рассматривать данное решение как реализацию некоторого управления Uj. Таким образом, управление Uj состоит в том, что на j-м месяце в первой лесосеке планируется в рубку Q1j м3 древесины,
во второй лесосеке Q2j м3 древесины и т. д. Совокупность чисел Q1j, Q2j,…,Qmj
определяет всю совокупность управлений U1, U2,...,Um на m месяцах планиро-
вания проведения лесосечно-транспортных работ.
В качестве главного критерия выбора времени и места проведения лесо-
сечно-транспортных работ, т. е. реализуемых управлений, принят минимум суммарной годовой деформации пути от вывозки леса годового лесосечного фонда ЛЗП. Следовательно, задача заключается в выборе управлений U*i, U*2
… U*12, в результате реализации которых система перейдет из начального со-