Материал: Методические основы совершенств. транспортных связей в предприя
111
топоезда могут представляться в модели различными способами. Один из них состоит в использовании списочной структуры, в рамках которой вместе с ин-
формацией, относящейся к данному лесовозному автопоезду, заполняются но-
мера идущих впереди и сзади него автомобилей. Другой заключается в подго-
товке перечня номеров лесовозного автопоезда, представляющего заранее оп-
ределенный порядок его следования [126]. Для проведения имитационного мо-
делирования должны быть установлены следующие данные: параметры, свя-
занные с индивидуальными характеристиками лесовозных автопоездов: ско-
рость, тип или их размер, максимальное ускорение и др.; общие для лесовозных автопоездов характеристики: характеристики следования за лидером, характе-
ристики обгонов и т. д.; характеристики дороги: число полос движения, огра-
ничение скорости, знаки, светофоры, расположение въездов и съездов и др.
Данные по первому из этих пунктов запоминаются в участке памяти ЭВМ совместно с текущей информацией относительно места расположения лесовоз-
ного автопоезда. Это относится к случаю имитационного моделирования дви-
жения по автомобильной магистрали, реализованной на ЭВМ; для представле-
ния информации об одном лесовозном автопоезде используются три 36-
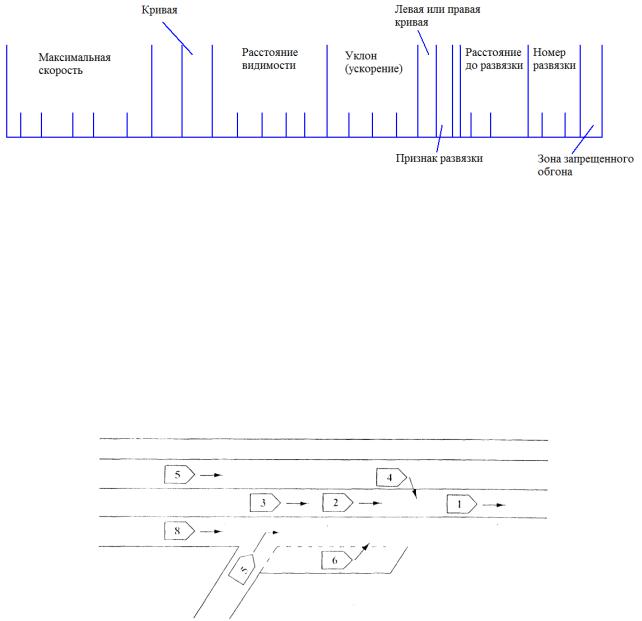
разрядных машинных слова. Одно машинное слово используется, как показано на рис. 4.6, для представления характеристик каждого участка дороги шириной
4,88 м. Данная модель является очень детализированной [53]. Для имитацион-
ного моделирования применяются более простые модели:
1. Модель свободного движения: автопоезд, не имеющий препятствий в движении по участку некоторой длины (автомобиль i = 1 на рис. 4.7), согласно работе [73], может двигаться с ускорением
xi (t ) K1 vdi x(t) r , |
(4.8) |
где ẍi – вторая производная скорости, τ – время реакции водителя, К1 – ко-
эффициент пропорциональности, зависящий от природно-климатических усло-
вий, x(t) − текущая скорость, vdi – желаемая скорость i-го автомобиля и < r > –
случайная переменная скорости, зависящая от ускорения (шум ускорения). Для
112
ее описания может быть использовано нормальное распределение, в некоторых случаях <r> можно пренебречь.
Рис. 4.6. Представление информации о дорожной ситуации
Лесовозный автопоезд, следующий за лидером: i-й автомобиль (автомо-
биль 2 на рис. 4.7), впереди которого движется с меньшей скоростью автомо-
биль j (автомобиль 1 на рис. 4.7), который может быть передвинут на основе модели следования за лидером:
xi (t ) k2 x j (t) xi (t) / x j (t) xi (t) r . |
(4.9) |
Рис. 4.7. Расположение автопоездов, входящих в автомобильный поток
Чтобы решить, к какому типу в данный момент времени относится кон-
кретный автопоезд – свободно движущемуся или следующему за лидером, –
необходимо определить величину интервала времени между данным автопоез-
дом и движущемся впереди автомобилем.
113
2. Автопоезд, меняющий полосу движения. Смена полосы движения (ав-
топоезд 5 на рис. 4.7) рассматривается как вероятность события, учитывающая-
ся временным интервалом t между автопоездом и следующими за ним по со-
седней полосе автомобилями.
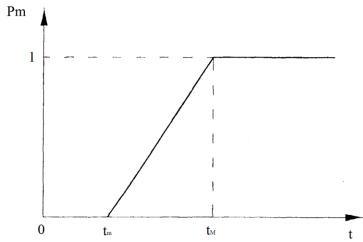
Рис. 4.8. График вероятности смены полосы движения автопоездов
Вероятность P(t) смены полосы движения за фиксированное время как функцию упомянутого временного интервала можно выразить следующей формулой
0,t tm |
|
|
||||
|
t |
|
|
|
|
|
t |
m |
|
|
|
||
p(t) |
|
|
,tm |
t tM |
(4.10) |
|
|
|
|
||||
tM |
tm |
|
|
|||
1,t |
M |
t |
|
|
||
|
|
|
|
|
||
График этой функции приведен на рис. 4.8 . Если tm≤ t ≤tM , то определяем необходимость смены полосы движения при n, принимающем значение от 0 до
1. Если n ≤ P(t), то смена полосы движения происходит при наличии впереди автомобиля с меньшей скоростью движения.
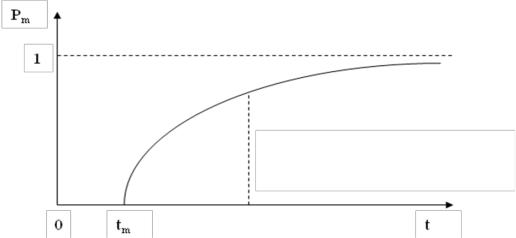
3. Автопоезд, входящий в автомобильный поток. Если имеется полоса ускорения (автопоезд 6 на рис. 4.9), то используется уравнение (4.10). Если нет полосы ускорения (автопоезд 5 на рис. 4.9, что характерно для устаревших ма-
гистралей), вероятность определяется следующим образом:
114
0, t tm |
|
|
|
|
|
|
|
|
t t |
|
|
, |
(4.11) |
p(t) |
m |
|||||
1 |
exp |
|
, t tm |
|
|
|
|
|
|
|
|||
|
|
tM tm |
|
|
||
где t – средний временной интервал в потоке, приемлемый для вхождения в не-
го транспортного средства; график P(t) приведен на рис. 4.9.
|
|
t t |
m |
|
|
1 exp |
|
|
|
,t tm |
|
|
|
|
|
||
|
|
|
|
||
|
tM tm |
||||
Рис. 4.9. График определения вероятности вхождения лесовозного автопоезда в общий поток движения
Прибытия автомобилей как на въезде, так и на полосе движения, куда осуществляются вхождения, при имитационном моделироании могут генериро-
ваться с использованием таблицы случайных чисел. Распределение интервалов может быть принято экспоненциальным и (или) эрланговским. Параметры от-
дельных автомобилей, такие как желаемая скорость, размеры и т. д., также оп-
ределяются случайными числами, причем для скорости вполне подходит нор-
мальное распределение. Назовем отношение времени, необходимого для моде-
лирования на ЭВМ, к длительности моделируемого процесса отношением ре-
ального времени. Это отношение колеблется в широких пределах. В зависимо-
сти от точности модели, масштабов сети моделировался участок дороги длиной
400 м на ЭВМ типа SWAC (Δt = 0,25 с), отношение реального времени состави-
ло 35 с. Текущие оценки пока еще существенно хуже.
115
4.4. Методика обработки статистических данных для проведения
исследований транспортно-грузовых процессов в лесном комплексе
Выполненные исследования транспортных потоков лесоматериалов пока-
зывают большое разнообразие типов распределений интервалов прибытия тран-
спортных средств и времени выполнения погрузочно-разгрузочных операций.
Целью исследования транспортно-грузовых процессов является определе-
ние реальных условий и состояния транспортной системы и выработка практи-
ческих рекомендаций по совершенствованию ее работы. Необходимо решить следующие задачи: определение оптимальных условий работы каналов обслу-
живания транспортных потоков, определение оптимальной производительности погрузочно-транспортных устройств (ПТУ) и их количества, определение по-
требного количества автотранспортных средств при оптимальном значении производительности и количестве ПТУ [58, 60].
В качестве исходных данных для исследования системы массового обслу-
живания (СМО) могут выступать: время интервалов между поступлением заявок в систему τ, время обслуживания заявки прибором tобсл и т. д. Предметом иссле-
дований СМО являются величины, зависящие от времени поступления заявки и от времени ее обслуживания прибором, например, число заявок nз, прибывших на обслуживание за заданный интервал времени Т; число заявок Nз, попавших сразу на обслуживание без очереди; среднее время tсp пребывания заявки в оче-
реди; средняя Lcp и максимальная Lмакс длина очереди к прибору; коэффициент загрузки прибора Кп = tприб/tобщ (время занятости прибора обслуживанием заявок
/ общее время работы). В рассматриваемой системе происходят события: e1 –
прибытие заявки; е2 – начало обслуживания заявки прибором; е3 – окончание обслуживания заявки. Диаграмма возникновения событий при разгрузке башен-
ным краном трех автопоездов приведена на рис. 4.10. Из нее можно определить:
число заявок, прибывших под разгрузку, nз = 3; число заявок, попавших на об-