Материал: mekhatronika_UrGUPS
Y = F (A1, …, An, R, E). |
(4.3) |
Продолжим рассмотрение стратегий группового управления. Централизованная единоначальная стратегия группового управления приведена на рис. 4.3.
S0 |
ЦУУ (командир) |
Цель (Sk) |
|
|
|
||
А1 |
R1 А2 R2 |
Аn |
Rn |
R1 |
R2 |
|
Rn |
Среда Е
Рис. 4.3. Централизованная единоначальная стратегия группового управления
Преимущества:
–простота организации и соответственно алгоритмизации процедур группового управления;
–высокое качество решения задачи группового управления.
Недостатки:
–низкая живучесть системы;
–длительное время решений задачи группового управления.
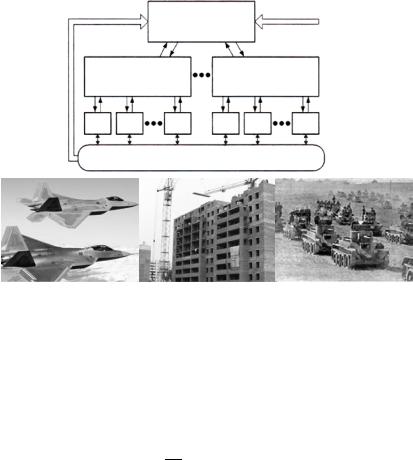
Централизованная иерархическая стратегия группового управления приведена на рис. 4.4.
Преимущества:
–снижение времени решения задачи группового управления;
–возможность управления большим числом объектов;
–более высокая живучесть.
61
|
S0 |
|
ЦУУ1 |
Цель Sk = (Rk, Ek) |
|||
|
|
|
командир |
|
|
|
|
|
|
|
1-го уровня |
|
|
|
|
|
ЦУУ21 |
|
|
ЦУУ2М |
|
||
|
командир |
|
|
командир |
|
||
|
2-го уровня |
|
|
2-го уровня |
|
||
R11 |
R12 |
R1n |
RМ1 |
RМ2 |
RМn |
||
|
|
|
Среда Е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.4. Централизованная иерархическая стратегия группового управления
Недостатки:
–большая временная задержка и возможность искажений при передачи команд управления от верхнего уровня к нижнему;
–снижение качества решения задачи группового управления. Децентрализованная коллективная стратегия группового управ-
ления приведена на рис. 4.5.
Принципы управления:
1.Каждый объект Ri (i =1,n) R имеет полную модель взаимодействия со всеми другими членами группы и средой (4.1), а также информационный канал связи со всеми другими членами группы.
2.На основании модели (4.1) объект Ri R выбирает такое действие AiT, которое направлено на преобразование текущей ситуации So в целевую Sk и дает при этом экстремальное приращение функционалу Y (4.3) при фиксированных действиях и состояниях других членов группы и среды.
3.Если ни одно из возможных действий объекта Ri R не дает приращения функционалу Y, то объект переходит к исполнению ранее выбранного действия AiT.
62
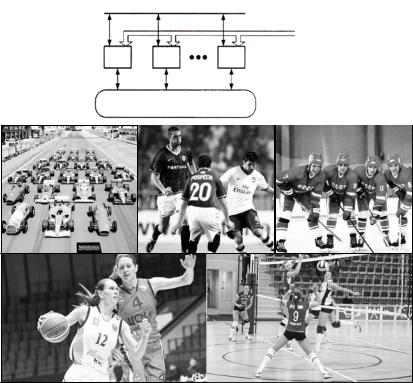
Канал обмена информацией
Цель Sk = (Rk, Ek)
R1 |
R2 |
Rn |
Среда Е
Рис. 4.5. Децентрализованная коллективная стратегия группового управления
4. В противном случае информация о новом выбранном действии AiT объекта Ri (i =1,n) сообщается всем остальным членам группы, после чего объект переходит к п. 2.
Преимущества:
–малое время принятия решения задачи группового управления;
–повышенная живучесть.
Недостатки:
–невысокое качество решения задачи группового управления;
–высокие требования к надежности информационного канала связи.
Примеры программных моделей, использующих коллективную стратегию группового управления, приведены на рис. 4.6, 4.7, 4.8.
63
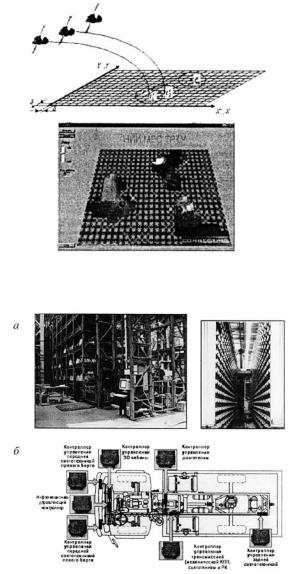
Рис. 4.6. Дистанционное зондирование поверхности группой БПЛА
Рис. 4.7. Распределенные системы, использующие стратегию группового управления: а – система коллективного управления группой складских роботов-штабелеров; б – распределенная мультиплексная система управления автомобилем на базе унифицированных бортовых контроллеров
64
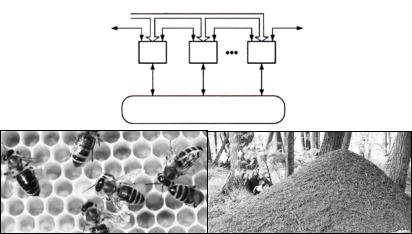
Децентрализованная роевая стратегия группового управления изображена на рис. 4.8.
Цель Sk
R1 |
R2 |
Rn |
Внешняя среда Е
Рис. 4.8. Децентрализованная роевая стратегия группового управления
Принципы управления:
1.Каждый объект Ri R обладает моделью взаимодействия с ограниченным подмножеством объектов RBi ≤ R и средой (4.1) и информационным каналом связи с ограниченным подмножеством объектов RBi ≤ R .
2.На основании модели (4.1) объект Ri R выбирает такое свое действие, которое при фиксированных действиях других объектов
подмножества RBi ≤ R направлено на достижение целевой ситуации Sk и дает экстремальное приращение функционалу Y.
3.Осуществляется итерационная оптимизация групповых дейст-
вий в подмножестве RBi до тех пор, пока никакие новые действия объектов Ri не дают приращения функционалу Y.
Преимущества:
–высокая живучесть;
–малое время принятия решения задачи группового управления;
–возможность управления массово-применяемыми объектами.
Недостатки:
–невысокое качество решения группового управления;
–невысокая скорость реакции на внешние объекты.
65