Материал: mekhatronika_UrGUPS
зателям мехатронных и робототехнических модулей и систем. Эти требования носят стратегический, тактический и прикладной характер.
К стратегическим требованиям можно отнести [8]:
–создание саморазвивающихся (самосовершенствующихся) мехатронных, робототехнических и физико-технических систем различного назначения;
–развитие интеллектуальных систем в направлении технического освоения творческих способностей человека.
Выполнение стратегических требований в свою очередь базируется (определяется) на реализации тактических требований, к числу которых следует отнести:
–развитие систем с переменной структурой;
–разработка алгоритмов самоорганизации системы в процессе ее самоусовершенствования аналогичных эволюционному развитию живой природы;
–дополнительное развитие формальных методов искусственного интеллекта.
Изменение структуры систем может иметь одну из трех целей: расширение адаптивных и функциональных возможностей и совершенствование систем в процессе эксплуатации. Структурные изменения можно реализовать путем построения мехатронных систем из функциональных оперативно изменяющихся модулей, адекватно меняющейся обстановке и решаемым задачам. Структурные изменения могут быть и чисто информационными (алгоритмическими) без изменения материальной части системы.
Разработка алгоритмов самосовершенствования (включая алгоритмы обучения, предусматривающие, в том числе и «обучение с учителем» под руководством человека), построение функционально гибких структурных схем – путь эволюционного развития мехатронных систем, подобный эволюционному развитию живой природы.
Дополнительное развитие формальных методов искусственного интеллекта, которые имитируют вербальное (логическое) мышление человека, пойдет по пути технического воспроизведения интуитивных способностей человека, основанных, прежде всего, на образном мышлении. Психологи и крупнейшие ученые в области информатики утверждают, что сознательное вербальное мышление человека составляет не более 10 % его мыслительной деятельности, а основной ее объем является подсознательным и в большей части образным [8]. Этим, по-видимому, объясняется известный парадокс – почему, чем сложнее задача, тем меньше человек полагается на логику и больше на
56

«здравый смысл», на интуицию, которая основана на образном мышлении, на визуализации задачи? Оказывается, логическое формализованное мышление связывает воображение, мешает ассоциативному поиску решения творческих задач.
И, наконец, прикладные требования к функциональным и струк- турно-конструктивным показателям мехатронных и робототехнических модулей и машин в значительной степени определяются уровнем и возможностями современной науки и техники.
Симбиоз имеющегося научного задела в мехатронике и реальных потребностях производства позволяет сформулировать современные прикладные требования к создаваемым в настоящее время мехатронным модулям, машинам и системам:
–выполнение машинами и системами качественно новых служебных и функциональных задач [1];
–интегрированные приводы;
–ультрапрецизионные микроэлектромеханические системы (MEMS) (в частности, микророботы);
–новые кинематические структуры и конструктивные компоновки многокоординатных машин [1];
–многофункциональные металлообрабатывающие центры;
–интеллектуальные мехатронные и робототехнические системы;
–дистанционное управление мобильными мехатронными системами.
4.1.1.Новые служебные и функциональные задачи мехатронных и робототехнических систем
Характерным примером выполнения мехатронной системой новых служебных функций служит система группового управления в распределенных системах [15].
Проблемы группового управления группой объектов, объединенных одной целью, актуальны для многих сфер. В принципе любая распределенная система, состоящая из отдельных элементов, сталкивается с проблемой группового управления, т. е. с проблемой управления взаимодействием отдельных ее частей для оптимального решения задачи, поставленной перед системой в целом.
57
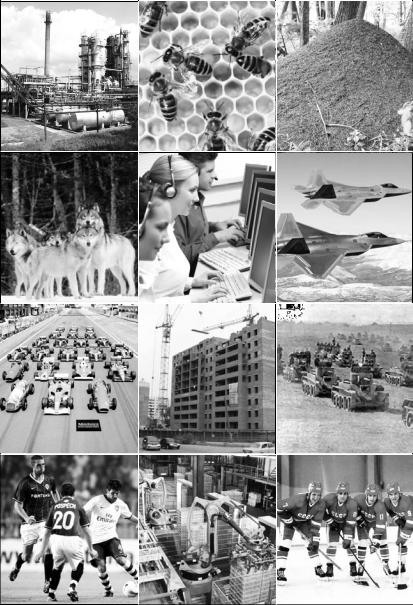
Рис. 4.1. Примеры задач группового управления в распределенных системах
58
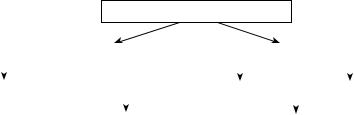
Различные стратегии группового управления показаны на рис. 4.2.
Стратегии группового управления
Централизованные стратегии |
|
|
Децентрализованные стратегии |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Единоначальная |
|
|
|
Коллективная |
|
|
|
Стайная |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Иерархическая |
|
|
|
|
|
Роевая |
|
|
|||||
Рис. 4.2. Стратегии группового управления
Централизованная единоличная стратегия группового управления предполагает наличие центрального устройства управления (ЦУУ) – командира, принимающего единоличные решения.
Центральная иерархическая стратегия группового управления допускает несколько ЦУУ различного уровня: ЦУУ 1 – первого уровня и ЦУУ 2М – второго уровня, где М ≥ 1 (одного или более ЦУУ второго уровня).
Децентрализованная коллективная стратегия подразумевает отсутствие у группы центрального устройства управления (командира), но в то же время наличие некоторого канала обмена информацией между объектами группы, с помощью которого отдельные объекты могут координировать и оптимизировать свои действия для достижения общей цели.
Роевая стратегия наиболее эффективно может быть использована при управлении массовыми группами объектов, например, «облаками» микророботов. Данная стратегия подразумевает наличие у каждого отдельного объекта роя ограниченного набора простейших действий, а также ограниченной зоны обмена информацией с ближайшими объектами, входящими в состав роя.
В отличие от коллективной и роевой стратегий группового управления стайная стратегия подразумевает отсутствие не только командира в группе объектов, но и какого-либо прямого канала связи между ними. При этом объекты, входящие в группу, могут получать только опосредованную информацию о действиях других объектов группы путем анализа изменений, происходящих в среде.
Формальную постановку задачи группового управления распределенной системой можно сформулировать следующим образом. Пусть
59
некоторая распределенная система R, состоящая из n подсистем (объектов) Ri (i =1,n) функционирует в среде E, причем каждый объект Ri может выполнять некоторый набор действий Ai = <ai1, ai2, …, aim>. Набор действий всех объектов Ri R(i =1,n) обозначим вектором A = <A1, A2, …, An>. В результате выполнения действий объектами Ri (i =1,n) изменяются состояния как самой системы R, так и сре-
ды E, т. е.
R = f1 (A,R,E),
E = f2 (A,R,E). |
(4.1) |
Причем на состояние системы R и среды E, а также на действие объектов Ri (i =1,n) в той или иной ситуации налагаются ограничения вида
ϕ(A,R,E)≤0 , |
|
ψ(A,R,E)≤0. |
(4.2) |
Состояние каждого объекта Ri R(i =1,n) в момент времени t опи-
сывается вектор-функцией ri (t) = [ri,1 (t), ri,2 (t), …, ri,h ]T (h – число параметров состояния i-го объекта). Состояние группы объектов зада-
ется вектором R (t) = [r1 (t), r2 (t), …, rn (t)]T. Состояние среды вокруг i-го объекта в момент времени t описывается вектором ei (t) = [ei,1 (t),
ei,2 (t), …, ei,w (t)]T (w – число параметров состояния среды вокруг i-го объекта). Тогда состояние среды, в которой функционируют объекты
рассматриваемой группы, при условии стационарности среды, в момент времени t описывается вектором
E (t) = [e1 (t), e2 (t), …, en (t)]T.
Объекты и среда, взаимодействуя друг с другом, образуют систему «группа объектов – среда», под состоянием которой в момент времени t понимают состояние, описываемое парой Sc = <R, E>. Множество различных состояний системы «группа объектов – среда» описывается точками n(h + w)-мерного пространства состояний {Sc}. Под начальным и целевым (конечным) состояниями системы понимаются состояния So = <Ro, Eo>, Sk = <Rk, Ek> соответственно. Необходимо определить такие действия Ai (i =1,n) всех объектов Ri (i =1,n), входящих в систему R, в результате выполнения которых исходная (начальная) ситуация So = <Ro, Eo> преобразуется в целевую (конечную) ситуацию Sk = <Rk, Ek>, а также достигается экстремум некоторого функционала качества
60