Материал: Манипулятор
Технологический процесс
В курсовом проекте будет рассматриваться манипуляционный робототехнический комплекс (РТК) – AR-RTK-ML-02. Данный манипулятор предназначен для ознакомления с принципами проектирования и конструирования манипуляционных роботов, основам разработки управляющего программного обеспечения (ПО) и с базовыми принципами построения архитектур систем управления гибких производственных ячеек.
Технологический процесс работы манипулятора представляет собой условное перемещение объектов между тремя точками на плоскости. На рисунке 6 представлен график поворотов шарниров манипулятора для такого технологического процесса.
,
град
Первый
привод
град
Четвёртый
привод
град
Пятый
привод
t,
с
Третий
привод
град
Второй
привод
град



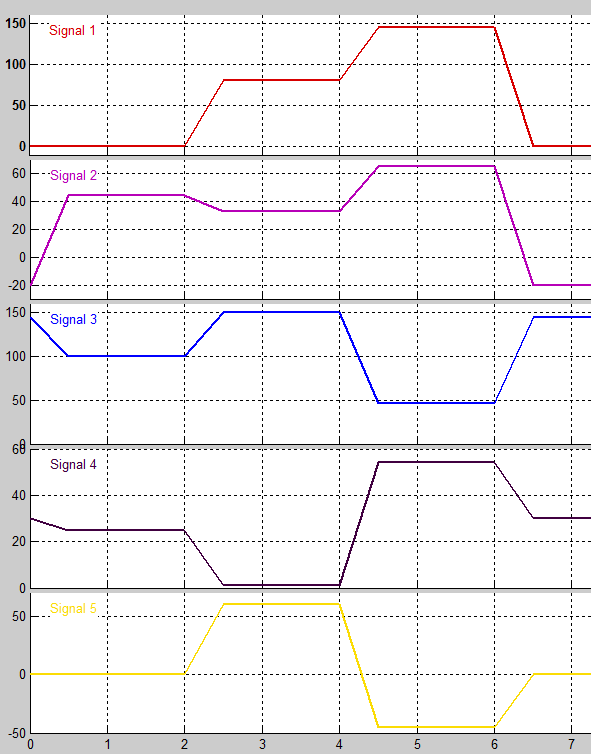
Рисунок 6 – Графики поворотов шарниров манипулятора
При такой динамике поворотов приводов положение захвата будет иметь траекторию движения, представленную на рисунке 7.
l,
мм
t,
с
1
2
3




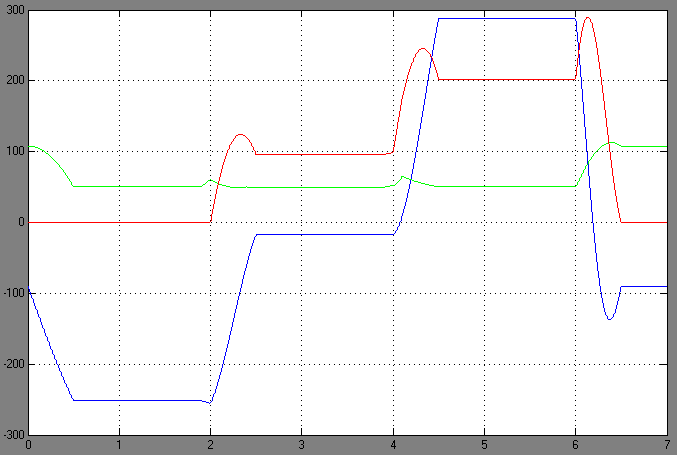
Рисунок 7 – Траектория движения конца захвата манипулятора: 1 – высота от основания платформы манипулятора; 2 – продольное расстояние от центра манипулятора по начальному положению манипулятора; 3 – поперечное направление от центра манипулятора по начальному положению манипулятора
3 Характеристика основного технологического оборудования
Манипулятор имеет пять вращательных степеней свободы и приводный захват. Его кинематическая схема изображена на рисунке 8. Схематические указания длин всех звеньев указаны на рисунке 9.
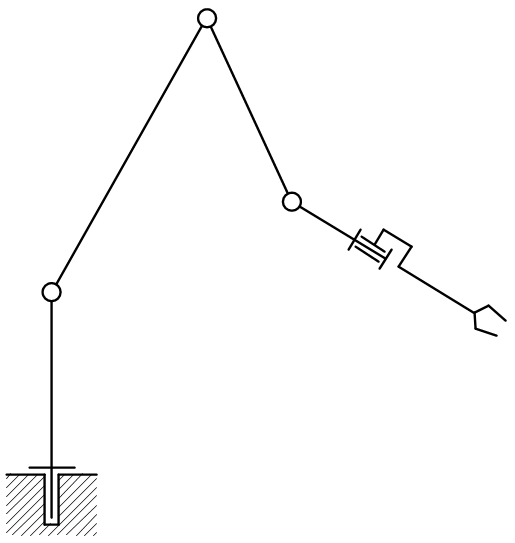
Рисунок 8 – Кинематическая схема манипулятора
Расстояния между осями манипулятор имеют следующие значения (рисунок 4):
расстояние между основанием и второй осью: 150 мм;
расстояние между второй и третьей осями: 210 мм;
расстояние между третьей и четвёртой осями: 135 мм;
расстояние между четвёртой осью и концом захвата: 184 мм;
глубина захвата: 42 мм;
максимальная ширина захвата 55 мм.
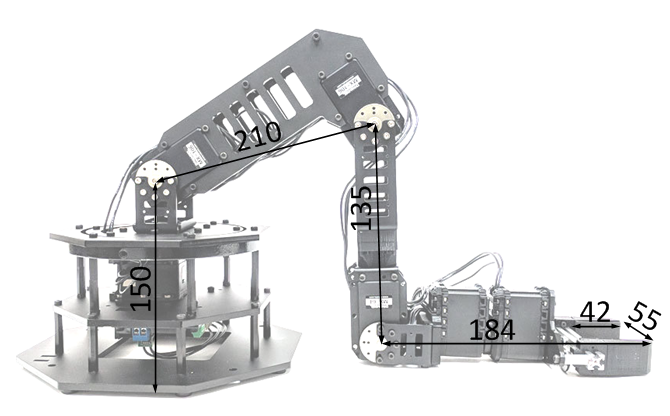
Рисунок 9 – Схематичное указание длин звеньев манипулятора в миллиметрах
Максимальные углы поворота приводов (считая от основания):
1 привода: ±180;
2 привода: –115 100;;
3 привода: –100 92;
4 привода: –100 84;;
5 привода: ±180;
6 привода: -180 52.
Так как в манипуляторе установлены сервопривода, которые нужно программировать. Сервопривода запускаются с помощью программируемого контроллера OpenCM9.04-C, который реализован на базе 32х-битного микроконтроллера ARM Cortex-M3. Контроллер содержит интерфейс TTL для управления сервомодулями типа Dynamixel.
Загрузка управляющих программ в контроллер осуществляется по USB кабелю (Micro-B), который входит в комплект. Контроллер OpenCM9.04-C легко программируется с помощью ROBOTIS OpenCM IDE, которая является Arduino-подобной интегрированной средой разработки, позволяющей пользователю разрабатывать управляющую программу на языках C/C++. Параметры контроллера указаны в таблице 1.
Таблица 1 – Спецификация контроллера
Тип |
STM32F103CB (ARM Cortex-M3) |
Рабочее напряжение |
5~16 B (USB 5 B, DYNAMIXEL ( 7~12 B) |
Рекомендуемое напряжение питания |
5 B для питания посредством USB |
Порты вводы-вывода |
26 |
Аналоговые входы |
10 (12-битный АЦП) |
Объем Flash памяти |
128 Кбайт |
Объем SRAM памяти |
20 Кбайт |
Тактовая частота |
72 МГц |
Интерфейс USB |
1 (2.0) |
Интерфейс USART |
3 |
Интерфейс SPI |
2 |
Интерфейс I2C(TWI) |
2 |
Отладочные порты |
JTAG & SWD |
Интерфейс TTL (3 пина) |
4 |
Внешние порты для датчиков (5 пинов) |
4 |
Габариты |
27*66,5 мм |
Вес |
13г |
4 Выбор двигателя
Т.к. манипулятор должен выполнять работу в любых областях его рабочей зоны любое количество времени, двигатели проверяются при работе манипулятора в самых тяжелых положениях.
В расчётах не учитывается инерция сочленений манипулятора из-за их незначительной инерции и веса относительно сервоприводов и груза. Так же не учитывается сила трения и сопротивление воздуха.
Статическая нагрузка на первый привод отсутствует.
Первый привод должен быть способен повернуться на 360о за 5 секунд. Значит, его угловое ускорение должно быть не меньше, чем:

Максимальная развиваемая скорость первого двигателя тогда должна быть не меньше, чем:

Максимальный приведённый момент инерции манипулятора при вращении по оси первого привода равен:





Тогда максимальный динамический момент первого привода равен:

Отсюда максимальный момент первого привода равен:

Максимальная статическая нагрузка на второй привод определяется:





Максимальный угол поворота второго привода равен:

Значит, угловое ускорение второго привода должно быть не меньше, чем:

Максимальная развиваемая скорость второго двигателя тогда должна быть не меньше, чем:

Максимальный приведённый момент инерции манипулятора при вращении по оси второго привода равен:





Тогда максимальный динамический момент второго привода равен:

Отсюда максимальный момент второго привода равен:

Максимальная статическая нагрузка на третий привод определяется:



Максимальный угол поворота третьего привода равен:

Значит, угловое ускорение третьего привода должно быть не меньше, чем:

Максимальная развиваемая скорость третьего двигателя тогда должна быть не меньше, чем:

Максимальный приведённый момент инерции манипулятора при вращении по оси третьего привода равен:



Тогда максимальный динамический момент третьего привода равен:

Отсюда максимальный момент третьего привода равен:

Максимальная статическая нагрузка на четвёртый привод определяется:



Максимальный угол поворота четвёртого привода равен: