Материал: Манипулятор
Реферат
Пояснительная записка выпускной квалификационной работы содержит 50 страниц формата А4, 17 рисунков, 5 таблиц, 6 используемых источников информации.
МАНИПУЛЯТОР, РТК, РОБОТ, АЛГОРИТМ ТРАЕКТОРИИ ПЕРЕМЕЩЕНИЯ, СЕРВОПРИВОД, КОНТРОЛЛЕР, ПЕРЕДАТОЧНАЯ ФУНКЦИЯ, ОБЪЕКТ РЕГУЛИРОВАНИЯ, СТРУКТУРНАЯ СХЕМА, ПЕРЕХОДНЫЕ ПРОЦЕССЫ, ЗАДАЧИ КИНЕМАТИКИ.
Объектом исследования стал манипуляционный РТК – AR-RTK-ML-02, предназначенный для ознакомления с принципами проектирования и конструирования манипуляторов, алгоритмов управления манипуляторов, основам разработки управляющего ПО.
Целью работы является проектирование электропривода и программирование манипуляционного РТК.
В итоге были выбраны электродвигатели для сервоприводов, использующихся в РТК, был запрограммирован манипулятор и проверена его работоспособность.
Содержание
Введение 3
1 общие сведения о манипуляторах 4
1.1 Манипуляционные робототехнические комплексы 4
1.2 Датчики манипуляторов 9
1.3 Типы датчиков 10
2 Технологический процесс 14
3 Характеристика основного технологического оборудования 17
4 Выбор двигателя 20
5 Построение тахограммы и нагрузочной диаграммы 29
6 Требования, предъявляемые к мехатронной системе 32
7 Разработка системы управления мехатронной системы 33
7.1 Построение контура регулирования тока 34
7.2 Построение контура регулирования скорости 35
7.3 Построение контура регулирования положения 36
8 Моделирование работы мехатронной системы 39
9 Реализация программного управления манипулятором 41
Выводы 45
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 46
Приложение А 47
Введение
Современный этап развития робототехники характеризуется широким использованием компьютерных технологий, например при подготовке манипулятора к работе с помощью использования программного обеспечения, а также для управления движением робота в реальном технологическом процессе. Манипулятор, в отличие от другого технологического оборудования, таких как конвейера, станки и т.п., является более сложным объектом с точки зрения управления движением из-за более сложной кинематики, динамического взаимодействия движений с различными степенями подвижности и более строгих ограничения по массе и габаритным размерам манипулятора. Алгоритмы управления движением, которые не учитывают эти факторы в достаточной степени, позволяют получить удовлетворительное качество управления только при низких требованиях к точности и скорости робота. По мере роста требований возникает необходимость более детального учета этих факторов, поскольку существуют дополнительные резервы для повышения точности и скорости. Для построения совершенных алгоритмов управления очень важно иметь точную математическую модель робота, которая обычно представляет собой уравнение движения, построенную на основе идеализации реальной системы и использования принципов и законов физики и других наук. с учетом геометрических и кинематических характеристик робота
Общие сведения о манипуляторах
Манипуляционные робототехнические комплексы
Большинство общепромышленных роботов - манипуляторы с последовательным соединением, обычно у них не более шести кинематически связанных осей подвижности. Условно, оси подвижности пронумерованы в последовательном порядке, поскольку они встречаются от основания до запястья. Первые три оси отвечают за движение робота в пространстве. Их настройка определяет размер пространства, в котором робот может быть расположен. Любые последующие оси в кинематической цепи обычно обеспечивают вращательные движения, чтобы ориентировать конец руки робота, и называются «осями запястья». В нашем трехмерном пространстве требуется три степени свободы для полностью независимого пространственного позиционирования и три степени свободы для полностью независимого ориентационного позиционирования.
Существует два основных типа движения звена робота - вращательное и поступательное. Вращательные звенья являются антропоморфными (например, суставы человека), в то время как поступательные соединения могут удлиняться и втягиваться, как автомобильная радиоантенна, или перемещаться по направляющей с помощью винтовой передачи. Часто бывает полезно классифицировать роботов в соответствии с ориентацией и типом их первых трех осей. Существует четыре очень распространенных конфигурации коммерческих роботов: шарнирный, тип SCARA I, тип SCARA II и декартовой. Две другие конфигурации: цилиндрическая и сферическая, теперь встречаются гораздо реже.
Шарнирный робот представлен на рисунке 1. Шарнирные роботы-манипуляторы очень разнообразны, большинство из них имеют шесть осей подвижности. Оси всех этих роботов способны вращаться. Вторая и третья оси копланарны и работают вместе, выполняя движения в вертикальной плоскости. Первая ось в основании робота – вертикальная, она вращает руку робота, чтобы смести большой рабочий объем. Было разработано много различных типов приводных механизмов, позволяющих устанавливать двигатели и редукторы запястья и предплечья близко к первой и второй оси вращения, таким образом, сводя к минимуму массу рычага. Основным ограничивающим фактором в работе шарнирного робота является то, что вторая ось должна большую часть времени работать, чтобы поднимать как последующую конструкцию рычага, так нагрузку.
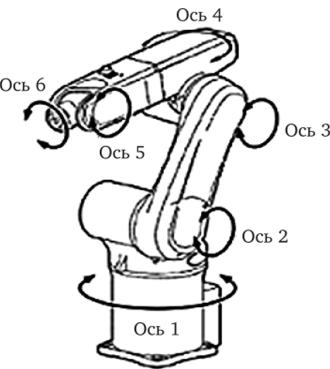
Рисунок 1 – Шарнирный промышленный робот – манипулятор
Робот SCARA I представлен на рисунке 2. В SCARA I, используются два параллельных поворотных шарнира для создания движения в горизонтальной плоскости. Рукоятка несущая, но первая и вторые оси не поднимаются. Третья ось обеспечивает рабочий объем путем добавления вертикальной оси или оси z. Четвертая ось вращения будет добавлять вращение вокруг оси z для управления ориентацией в горизонтальной плоскости. Этот тип роботов редко встречается с более чем четырьмя осями. SCARA I широко используется при сборке электронных компонентов и устройств, а также широко используется для сборки механических узлов малого и среднего размера.
Рисунок 2 – Робот-манипулятор SCARA I
SCARA II также имеет 4 оси, но в отличии от SCARA I, его первая ось представляет собой длинный вертикальный стенд, который поднимает две параллельные оси вращения. Для быстро перемещающихся более тяжелых грузов на большие расстояния робот SCARA II более эффективен, чем тип I.
Декартовый робот представлен на рисунке 3. Декартовые роботы используют ортогональные оси, обычно называемые x, y и z, для переноса их рабочего органа или нагрузки через свое прямоугольное рабочее пространство. Для ориентации можно добавить одну, две или три вращающиеся оси запястья. Коммерческие робототехнические компании поставляют несколько типов декартовых роботов с размерами рабочего пространства от нескольких кубических миллиметров до десятков тысяч кубических сантиметров и полезной нагрузкой от нескольких десятков килограмм. Портальные роботы, которые имеют улучшенную мостовую конструкцию, являются наиболее распространенными декартовыми роботами и хорошо подходят для погрузочно-разгрузочных работ, где необходимо обслуживать большие площади и/или большие нагрузки. Они особенно полезны в таких применениях, как дуговая сварка, гидроабразивная резка.
Рисунок 3 – Декартовый промышленный робот
Сферические и цилиндрические координатные роботы представлены на рисунке 4. Первые две оси сферического координатного робота вращающиеся и ортогональны друг другу, а третья ось обеспечивает поступательное радиальное движение. Результатом является естественная сферическая система координат со сферической рабочей областью. Первая ось цилиндрических координатных роботов представляет собой вращающееся основание. Второй и третий поступательные, что приводит к естественному цилиндрическому движению. Коммерческие модели сферических и цилиндрических роботов изначально были очень распространены и популярны. Сотни все еще используются, но сейчас есть только несколько коммерчески доступных моделей. Упадок в использовании этих двух типов объясняется проблемами, возникающими из-за использования поступательного звена для радиального выдвижения.
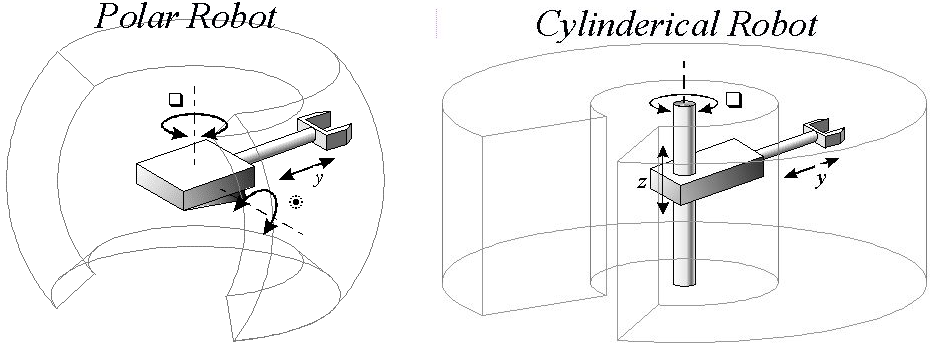
Рисунок 4 – Сферический и цилиндрический робот-манипулятор
Манипулятор с параллельными звеньями представлен на рисунке 5. Иногда роботы с параллельной связью подходят больше, чем роботы с последовательной связью. Эти роботы обычно имеют три или шесть параллельных звеньев, каждое звено прикреплено к неподвижному основанию и к подвижной рабочей платформе. При правильной конструкции шестиступенчатый параллельный манипулятор может иметь шесть степеней свободы перемещения рабочей платформы. Манипуляторы с параллельными звеньями способны точно перемещать большие нагрузки. Эти роботы используются, например, при обработке и отделке поверхности прецизионных промышленных и аэрокосмических деталей, таких как переборки и наружная обшивка летательных аппаратов. Робот с параллельными звеньями представляет собой систему с замкнутой кинематической цепью. Задачи проектирования системы управления для этих роботов сложнее, чем для предыдущих.
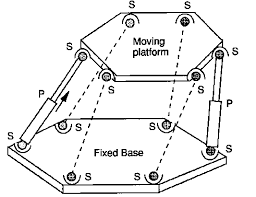
Рисунок 5 - Манипулятор с параллельными звеньями
Датчики манипуляторов
Датчики функционируют как преобразователи, устройства, через которые высокоуровневые рабочие системы планирования, координации и управления взаимодействуют с аппаратными компонентами. Датчики являются существенно важными элементами, потому что они преобразуют состояния физических устройств в сигналы, подходящие для ввода в систему управления рабочей ячейки. Несоответствующие датчики могут привести к ошибкам, которые делают невозможной правильную работу, независимо от того, насколько сложной или дорогой является система, в то время как инновационный выбор датчиков может значительно облегчить проблему управления и координации.
Датчики бывают разных типов и имеют много разных применений. Имея в виду аналогию с биологическими системами, проприоцепторы представляют собой датчики, встроенные в устройство, которые выдают информацию о внутреннем состоянии данного устройства (например, датчики угла соединения плеча робота). Экстероцепторы дают информацию о другом оборудовании, внешнем по отношению к устройству. Датчики выдают аналоговые или цифровые сигналы. Цифровые датчики часто предоставляют информацию о состоянии машины или ресурса (захват открыт или закрыт, машина загружена, задание выполнено). Датчики выдают выходные данные, необходимые на всех уровнях иерархии, включая использование для:
управления с обратной связью на уровне серво (обычно аналоговые проприоцепторы)
мониторинг и координация процесса (часто цифровые экстероцепторы или датчики контроля деталей, такие как зрение)
контроль неисправностей и безопасности (контактный датчик, пневматический датчик потери давления)
проверка контроля качества (часто зрение или сканирование лазером).
Выходные данные датчика должны обрабатываться, чтобы преобразовать их в форму, имеющую смысл для системы. Некоторые датчики, в том числе проприоцепторы, необходимые для управления обратными связями на уровне сервопривода, являются неотъемлемыми частями хост-устройств, поэтому обработка данных датчиков и их использование происходит внутри этого устройства, затем данные датчика включаются на уровне сервоконтроля. Другие датчики, часто следящие системы, конкурируют с роботом-манипулятором по сложности и управляются с помощью подачи сигнала заданий, Интересную проблему управления создает так называемое активное зондирование, когда, робот может держать сканирующую камеру, а камера эффективно берет на себя задачу координации движения, указывая роботу, куда двигаться, чтобы добиться максимального снижения энтропии. (увеличение информации) с последующими изображениями.
1.3 Типы датчиков
Тактильные датчики. Тактильные датчики основаны на физическом контакте с внешними объектами. Цифровые датчики, такие как концевые выключатели, микровыключатели и вакуумные устройства, дают двоичную информацию о том, происходит контакт или нет. Аналоговые датчики, такие как подпружиненные стержни, дают больше информации. Тактильные датчики на основе резиноподобных углеродных или кремниевых эластомеров со встроенными электрическими или механическими компонентами могут предоставить очень подробную информацию о геометрии детали, ее расположении и многом другом. Эластомеры могут содержать резистивные или емкостные элементы, электрические свойства которых изменяются при сжатии эластомера. .
Датчики приближения и расстояния. Бесконтактные датчики приближения включают устройства, основанные на эффекте Холла, или индуктивные устройства, основанные на электромагнитном эффекте, которые могут обнаруживать черные металлы в пределах примерно 5 мм. Такие датчики часто являются цифровыми, что дает двоичную информацию о том, находится ли объект рядом или нет. Датчики на основе емкости обнаруживают любое находящееся поблизости твердое вещество или жидкость с диапазоном около 5 мм. Оптические и ультразвуковые датчики имеют более длинные диапазоны.
Датчики расстояния включают в себя такие устройства, как гидролокатор и лазеры. Коммерчески доступный гидролокатор Polaroid предлагает точность от 1 дюйма до 5 футов, а точность углового сектора около 15 градусов. На 360 град. покрытие в навигационных приложениях для мобильных роботов, доступны как сканирующие сонары, так и несколько сонаров с кольцевым креплением. Сонар обычно шумит при ложных показаниях и требует фильтрации нижних частот и другой обработки данных, направленных на снижение частоты ложных тревог. Более дорогие лазерные дальномеры чрезвычайно точны на расстоянии и имеют очень высокое угловое разрешение.
Датчики положения, скорости и ускорения. Устройства для измерения линейного положения включают в себя линейные потенциометры и только что рассмотренные сонарные и лазерные дальномеры. Датчики линейной скорости могут быть устройствами с доплеровским эффектом на основе лазера или сонара.
Проприоцепторы положения и угла соединения являются важной частью оси сервопривода манипулятора. Датчики углового положения включают потенциометры, которые используют напряжение постоянного тока, и резольверы, которые используют напряжение переменного тока. Оптические энкодеры могут обеспечить предельную точность, используя цифровые методы. Инкрементальные оптические датчики используют три оптических датчика и одно кольцо чередующихся непрозрачных / прозрачных областей, для обеспечения углового положения относительно контрольной точки и информации об угловой скорости.
Гироскопы имеют хорошую точность, если компенсировать проблемы, связанные с дрейфом. Направленные гироскопы имеют точность около 1,5 град. Вертикальные гироскопы имеют точность 0,5 градуса и доступны для измерения многоосевого движения. Скоростные гироскопы измеряют скорости непосредственно с порогами 0,05 град / с или около того.
Доступны различные виды акселерометров в зависимости от тензодатчиков, гироскопов или свойств кристаллов. Коммерческие устройства доступны для измерения ускорений по трем осям. Новая популярная технология включает микроэлектромеханические системы (МЭМС), которые представляют собой либо поверхностные, либо объемные микрообработанные устройства. МЭМС-акселерометры очень маленькие, недорогие, надежные и точные. МЭМС-датчики особенно хорошо используют в автомобильной промышленности.
Датчики силы и крутящего момента. Доступны различные датчики крутящего момента, хотя они часто не требуются, например, внутренние крутящие моменты в соединениях манипулятора робота могут быть вычислены из токов якоря двигателя. Например, датчики крутящего момента на буровом инструменте могут указывать, когда инструменты затупливается. Пьезоэлектрический эффект, генерация напряжения при приложении силы, также может использоваться для определения силы. Другие методы измерения силы основаны на вакуумных диодах, кварцевых кристаллах (резонансная частота которых изменяется с приложенной силой).
Датчики силы-крутящего момента запястья робота чрезвычайно полезны для ловких движений робота. Доступные устройства могут измерять как силу, так и крутящий момент вдоль трех перпендикулярных осей, предоставляя полную информацию о декартовом векторе силы. Стандартные преобразования позволяют вычислять силы и моменты в других координатах.
Фотоэлектрические датчики. Доступен широкий спектр фотоэлектрических датчиков, некоторые из которых основаны на волоконно-оптических принципах. Они имеют скорость отклика около 50 мкс с диапазоном примерно до 45 мм и полезны для обнаружения деталей и маркировки, сканирования оптических штрих-кодов, подтверждения прохождения детали в задачах сортировки.