Материал: Контроллер заряда аккумуляторной батареи от солнечной панели
Датчик тока и датчик напряжения, необходимые для определения величины тока и напряжения соответственно. В дальнейшем происходит оцифровка сигнала с датчиков и использования этих значений для расчета мощности и контроля заряда аккумуляторной батареи. Блок умножения служит для вычисления мощности, которая определяется путем перемножения тока и напряжения.
Аналого-цифровой преобразователь - устройство, преобразующее входной аналоговый сигнал в дискретный код (цифровой сигнал). Обратное преобразование осуществляется с помощью цифро-аналогового преобразователя.
Драйвер - электронный компонент для управления преобразователем. Используется для усиления, формирования фронта и спада управляющих импульсов.
Микроконтроллер, является основой всего устройства и выступает основой интеллектуальной системы управления процессом заряда аккумуляторной батареи и отбора максимальной мощности от солнечного модуля.
Аккумуляторная батарея, имеет свойство после разряда восстанавливать свою способность отдавать ток во внешнюю цепь, если через нее пропустить ток в обратном направлении, то есть если произвести ее заряд. Запасая энергию в период избытка, подают ее в систему в период недостатка при недостаточном освещении фотоэлементов или при временном росте потребления.
Блок клавиатуры для выбора той или иной аккумуляторной батареи из перечня (базы данных) занесенного в память микроконтроллера. Жидкокристаллическая индикация- LSD дисплей необходим для удобства визуального "диалога" между пользователем и устройством. Питание аккумулятора осуществляется с помощью солнечной батареи. Для стабильного подпитки и соответственно заряда аккумулятора, необходимо отбирать максимально возможную мощность от солнечного модуля. Роль регулятора отбора максимальной мощности выполняет - блок перемножения (вычисляет мощность, является результатом произведения измеренного тока и напряжения) и микроконтроллер, который в свою очередь вносит возмущения в систему путем изменения напряжения нагрузки и наблюдает реакцию этой системы, тем самым и проявляя максимум на кривой мощности солнечной батареи.
Микроконтроллер так же берет на себя функции управления преобразователем.
Формирует импульсы установленной продолжительности для увеличения или
уменьшения напряжения нагрузки с целью определения максимума отобранной
мощности, или не формирует (отключение нагрузки) в случае полного заряда
аккумулятора.
3. Разработка алгоритма работы устройства
При подключении контроллера заряда к аккумуляторной батарее, пользователю предоставляется возможность ввести параметры нагрузки, а именно: максимальное и минимальное напряжение аккумуляторной батареи. Минимальный уровень напряжения должен быть задан для предотвращения полного разряда аккумуляторной батареи. Если этот параметр не вводится пользователем, то минимальное напряжение, при котором будет включен процесс зарядки, по умолчанию принимается на уровне 90% от максимального напряжения аккумуляторной батареи. После ввода параметров нагрузки выполняется проверка состояния батареи.
Далее реализуется принцип поиска максимума мощности путем коротких
периодических изменений положения рабочей точки. Проводится расчет мощности,
отбираемая от фотоэлектрического модуля, и сравнение ее величины с предыдущим
значением. Если мощность на выходе контроллера заряда увеличивается, то на
следующем шаге положение рабочей точки снова меняется в этом направлении. Шаг изменения
напряжения определяется разрядностью микроконтроллера и максимальным
напряжением солнечной батареи:
![]()
Где h - шаг смены напряжения, В;.PV - максимальное напряжение солнечной батареи, В;- количество разрядов микроконтроллера.
Одновременно с процессом определения максимальной точки происходит отслеживание уровня заряда аккумуляторной батареи. Если напряжение на нагрузке больше максимально допустимого (задается пользователем), то процесс заряда приостанавливается. Если же напряжение на аккумуляторной батарее падает до минимального значения, то процесс заряда снова восстанавливается.
Блок-схема описанного алгоритма работы контроллера заряда приведена на
рисунке 3.1.
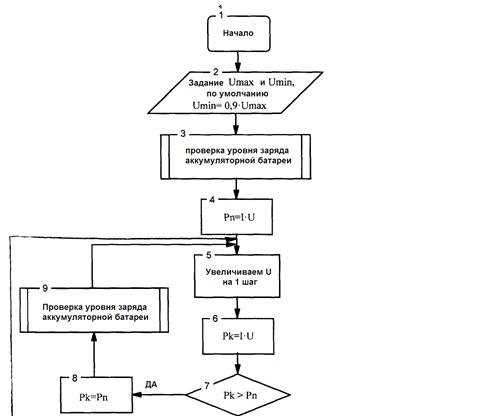
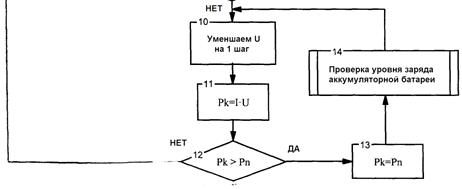
Рисунок 3.1 - Алгоритм работы устройства
Подпрограмма проверки уровня заряда аккумуляторной батареи приведена на
рисунке 3.2.
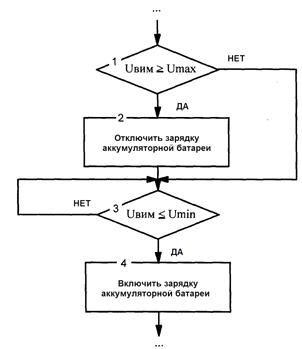
Рисунок 3.2 - Подпрограмма проверки уровня заряда аккумуляторной батареи.
4. Разработка устройства и расчет его элементов и узлов
.1 Выбор солнечной панели
Разрабатываемое устройство является "монолитным" и его невозможно четко разделить на конкретные функциональные блоки. Можно лишь оговориться о том, что функцию отбора максимальной мощности выполняют такие элементы как: микроконтроллер, импульсный преобразователь, датчик тока, датчик напряжения, блок умножения, аналого-цифровой преобразователь.
Основным элементом всей системы является солнечная панель (СП). Так как устройство, которое разрабатывается, рассчитано на заряд аккумуляторной батареи переносных электронных устройств, поэтому солнечная панель должна быть портативной, компактной, удобной при транспортировке и использовании.
Солнечные панели выполняются по поликристаллической и монокристаллической технологии. Преимуществом поликристаллических СП является возможность эффективно работать на рассеянном солнечном свете, но КПД их ниже, чем у монокристаллических СП. Монокристаллические СП обеспечивают высокий КПД - до 20%, но их энергоотдача существенно зависит от условий освещенности.
Из многочисленного выбора СП, предпочтение отдано портативной солнечной панели Acmepower SP-18W, мощностью 18Вт. Она предназначена для обеспечения автономного питания портативной техники.
Технические характеристики солнечной панели Acmepower SP-18:
· панели солнечной батареи из монокристаллического кремния с КПД 16%;
· суммарная мощность солнечных панелей (при 1000 Вт/м2): 18 Вт;
· рабочее напряжение солнечной панели: 17,5 В;
· напряжение холостого хода 21 В;
· максимальный ток в точке рабочего напряжения: 1 А;
· ток короткого замыкания 2,55 А;
· вес 1,1 кг;
· размеры в сложенном виде 295мм / 240мм / 20мм.
.2 Выбор импульсного преобразователя
В связи с тем, что в алгоритме отбора максимальной мощности предполагается процесс моделирования напряжения нагрузки, путем увеличения или уменьшения уровня напряжения, а так же в связи с тем, что устройство заряда рассчитано на различные виды АКБ с различными ЭДС, в данном случае целесообразно применить ИППН повышающе-понижающий.
При построении микропроцессорной системы целесообразно использовать
микросхему импульсного преобразователя напряжения. Из большого перечня
доступных импульсных повышающе-понижающих преобразователей напряжения
рационально применить микросхему LТМ4607, так как она обладает необходимыми
свойствами и параметрами. А именно, данный преобразователь способен
регулировать выходное напряжение при различных напряжениях на входе устройства
(больше, меньше или равным исходному). LТМ4607 работает при входных напряжениях
от 4.5 В до 36 В, позволяет изменять выходное напряжение от 0.8 В до 24 В,
обеспечивает выходной ток 5А. Схема LTМ4607 включает в себя синхронный
понижающий - повышающий DС/DС контроллер, 4 МОSFЕТ-транзистора (К-канал), схему
компенсации. Упрощенная блок-схема импульсного преобразователя постоянного
напряжения LТМ4607 представлена на рисунке 4.1.
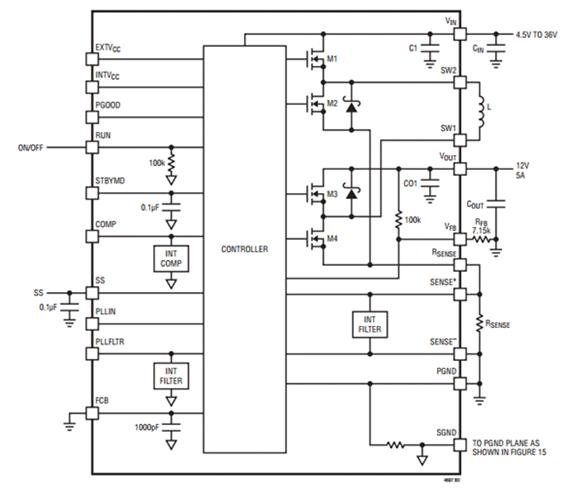
Рисунок 4.1 - Упрощенная блок-схема импульсного преобразователя
постоянного напряжения LТМ4607
На рисунке 4.2 представлена схема подключения преобразователя.
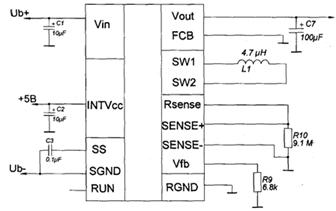
Рисунок 4.2 - Схема подключения импульсного преобразователя постоянного
напряжения LТМ4607
Построение обвязки микросхемы, номиналы конденсаторов, резисторов индуктивности взяты из технической документации на данный импульсный преобразователь как рекомендуемые.
В качестве драйвера была выбрана микросхема IR2121. IR2121 - драйвер быстродействующего силового МОП-транзистора или IGВТ-транзистора с защитной схемой для ограничения тока. Устойчива к замыканию КМОП-технология позволила создать монолитную конструкцию. Логические входы совместимы со стандартными КМОП или LSТТL выходами. Выходы драйверов отличаются высоким импульсным током буферного каскада, выполнен для минимизации встречной проводимости драйвера.
Схема защиты определяет перегрузки в управляемом транзисторе и
ограничивает управляющее напряжение затвора. Время выключения программируется
внешним конденсатором, который непосредственно руководит интервалом времени
между определением условия перегрузки по току и срабатыванием. Схема
подключения драйвера IR 2121 показана на рисунке 4.3.
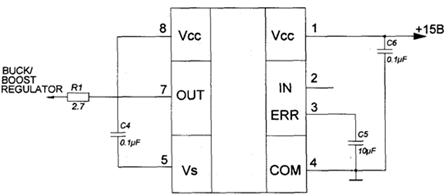
Рисунок 4.3- Схема подключения драйвера IR 2121
.3 Выбор микроконтроллера
Микроконтроллер - это микросхема, предназначенная для управления электронным устройством, которое разрабатывается. Кругом приоритетных задач, которые выполняет МК является сравнение рассчитанных мощностей "отобранных" у солнечной батареи; хранения в памяти микроконтроллера перечня типов используемых аккумуляторных батарей; отмены процесса заряда АБ при превышении номинального напряжения и наоборот восстановления заряда при ее падении на установленный пользователем уровень.
И основной задачей для МК конечно же остается формирование возмущающих импульсов для повышения (снижения) напряжения нагрузки с целью отслеживания и содержание экстремума на кривой мощности солнечной батареи.
Принимая во внимание все условия работы микропроцессорной системы в целом, те требования предъявляемые к МК, а именно: большое быстродействие (так как все процессы по поиску максимальной рабочей точки динамические и требуют быстрой обработки данных), надежность, встроенная энергонезависимая память.
Все эти факторы заставляют прибегнуть к применению микроконтроллера 1986ВЕ92У, построенного на базе высокопроизводительного процессорного RICS ядра АRМ СоrTех-МЗ.
На рисунке 4.4 приведена схема подключения микроконтроллера.
Рисунок 4.4 - Схема подключения микроконтроллера
Тактовая частота данного микроконтроллера составляет 80 МГц. Как показано выше на рисунке 4.4 подключаем к МК внешний кварцевый резонатор ВQ1 на 80 МГц, который включен по стандартной схеме, с погрузочными конденсаторами С11 и С12.
Кнопка SВ1 в совокупности с резистором R11 с номиналом 10 кОм и
конденсатором С8, с номиналом 100 нФ, заведена на вход RESET (сигнал внешнего
сброса) для того, чтобы в случае "зависания" перезапустить МК. Все
номиналы элементов и схема включения взяты из документации на данный
микроконтроллер.
4.4 Выбор и расчет компаратора с гистерезисом
Поскольку одним из ключевых моментов при проектировании устройства является контроль заряда аккумуляторной батареи, другими словами исключения возможности ее перезаряда или недозаряда, ведущий к потере ею установленной номинальной емкости, то для сравнения заданной величины напряжения и данных, считываемых с датчика напряжения целесообразно использовать компаратора с гистерезисом. Выбор объясняется тем, что в компараторе в условиях повышенного уровня помех, при медленно меняющихся входных сигналах или когда приоритетным является снижение вероятности ошибочных переключений, возникает необходимость формирования передаточной характеристики с гистерезисом за счет введения положительной обратной связи. В этом случае сигнал подается на инвертирующий вход компаратора, а на неинвертирующий вход через резистивный делитель подается сигнал с прямого выхода. Соотношение сопротивлений резисторов обратной связи устанавливает ширину петли гистерезиса.
В качестве компаратора была выбрана микросхема АD8561.
Схема подключения компаратора с гистерезисом приведена на рисунке 4.5.
Рисунок 4.5 - Схема включения компаратора с гистерезисом
Компаратор может питаться как разнополярным так и однополярным положительным напряжением +5 В. Делитель напряжения, состоящий из двух резисторов R4, R5, необходим для снижения напряжения на входе компаратора к 4,5В (рабочее напряжение) .Учитывая, что максимальное входное напряжение составляет 20 В , а рабочее напряжение компаратора 4,5 В, зададимся одним из сопротивлений делителя. R4 = 10 кОм.
Далее из пропорции представленной ниже в формуле (4.1) вычислим значение
сопротивления R5:
![]() (4.1)
(4.1)
По ряду Е24 выбираем наиболее приближенное
![]()
Для определения значений резисторов R6, R7, R8 необходимо знать уровни порогов петли гистерезиса Vth и Vtl. Верхний порог (Vth) составляет 15,05 В, нижний (Vtl) 14,95 В.
Далее задаемся резисторами R6 и R7. Потому как при расчетах важно учитывать, что через резисторы R6 и R7 течет постоянный ток, поэтому их суммарное значение должно быть не менее 1 кОм. Кроме того, это значение не должно выше 10 кОм от этого зависит значение резистора R10. Отсюда принято брать R6 = 10 кОм и R7 = 8,2 кОм.
После представлен алгоритм расчета сопротивления R8:
![]() (4.2)
(4.2)
![]()
![]() (4.3)
(4.3)
![]()
![]() , (4.4)
, (4.4)
![]()
![]() (4.5)
(4.5)
![]()
По ряду Е24 выбираем наиболее приближенное значение сопротивления R8- равно 220 кОм. Резисторы выбираются из серии С2-ЗЗН, мощностью 0,125 Вт.
солнечный контроллер заряд батарея
4.5 Выбор умножителя
Аналоговый умножитель необходим для умножения значений тока и напряжения с целью определения максимума на кривой мощности и вместе с тем отбора максимальной мощности от солнечного модуля.
Практически все современные аналоговые умножители построены на основе двух дифференциальных усилителей (ДУ), объединений симметрично-перекрестными связями, управления крутизной которых за счет перераспределения токов выполняет еще один ДУ.
В качестве такого аналогового умножителя избран К525ПС2Б. Он является
недорогим, легко доступным и зарекомендовал себя как надежный элемент в любой
электронной системе. Схема подключения аналогового умножителя показана на
рисунке 4.6.