Материал: Боженко Основы квантовой химии

или
|
• |
+ U (q) |
E = T q, q |
||
|
|
|
В декартовых координатах оказывается,
L = ∑ |
m v2 |
|
− U (r1, r2 ,..., rn ) и мы знаем, что |
||
|
a |
a |
|
||
2 |
|
||||
a |
|
|
|
||
E = ∑ |
|
m v2 |
|
+ U (r1, r2 ,..., rn ) |
|
|
a |
a |
|
||
2 |
|
|
|||
a |
|
|
|
||
(I.13)
что
(I.14)
Таким образом, энергия системы может быть представлена в виде двух суммы двух ее типов: кинетической энергии, зависящей от скоростей, и потенциальной, зависящей от взаимного расположения материальных точек (или координат частиц).
Импульс
Следующий закон сохранения связан с однородностью пространства, которая означает, что механические свойства замкнутой системы не меняются при параллель-
ном переносе системы как целого в пространстве. При таком переносе системы все ее точки смещаются на один и тот же
вектор |
ε , т.е. r |
|
+ ε → r ' |
→ |
a |
и можно обозначить, что ε = dr . |
|||
|
|
a |
a |
Так как свойства системы не меняются, то L должна быть постоянной при этом:
dL = ∑ |
∂L |
dra = ε ∑ |
∂L |
= 0 |
(I.15) |
||
|
|
||||||
|
a ∂r |
a ∂r |
|
|
|||
|
|
|
a |
|
a |
|
|
Так как вектор ε |
произволен, то должно быть: |
|
|||||
∑a |
∂L |
= 0 |
|
|
|
(I.16) |
|
∂r |
|
|
|
||||
|
a |
|
|
|
|
||
|
|
|
|
16 |
|
|
|

И поскольку из уравнений Лагранжа следует, что
∑ |
∂L |
= ∑ |
d |
|
|
∂L |
, то |
(I.16) можно |
переписать так: |
|||||||||
|
|
|
|
• |
||||||||||||||
a ∂ra |
|
|
a dt |
|
|
|
|
|
|
|
||||||||
|
|
|
|
∂L |
|
|
|
∂ ra |
∂L |
|
|
|
∂L |
|
|
|||
∑ |
d |
|
|
= ∑ |
d |
|
|
= |
d |
∑ |
= 0 |
(I.17) |
||||||
|
|
• |
|
|
|
dt |
|
|||||||||||
a dt |
|
|
|
a |
|
|
dt ∂va |
a ∂va |
|
|||||||||
|
|
|
∂ ra |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Таким образом, в замкнутой механической системе
векторная величина P = ∑ ∂L = const при движении.
a ∂va
P – называется импульсом системы.
Дифференцируя функцию Лагранжа, найдем, что
P = ∑mava |
(I.18) |
a |
|
Аддитивность импульса очевидна, поскольку он равен сумме импульсов отдельных частиц, причем независимо от наличия или отсутствия взаимодействия между ними. В
обобщенных координатах |
∂L |
= p – обобщенный импульс. |
|
• |
|||
|
i |
||
|
∂ qi |
|
Центр инерции
Очень важным понятием, используемым при рассмотрении различных видов механических движений системы как целого, является понятие о центре инерции.
Импульс замкнутой механической системы имеет различные значения по отношению к различным инерциальным системам отсчета.
Если система отсчета K’ движется относительно системы отсчета K, со скоростью V , то скорости частицы с ин-
17

дексом “a” Va ' и Va' по отношению к этим системам отсчета
связаны соотношением V = V ' |
+V . Поэтому значения |
P и |
|||
|
a |
a |
|
|
|
P' импульса в этих системах связаны соотношением |
|
||||
P = ∑maVa = ∑maVa' + ∑maV = ∑maVa' +V ∑ma |
или |
||||
a |
a |
a |
a |
a |
|
P = P' +V ∑ma
a
В частности, всегда можно выбрать такую систему отсчета K ' , в которой полный импульс равен нулю. Поэтому,
положив P' = 0 , найдем, что скорость этой системы отсчета равна:
V = |
P |
= |
∑maVa |
(I.19) |
a |
||||
∑ma |
∑ma |
|||
|
a |
|
a |
|
Если полный импульс механической системы равен нулю, то говорят, что она покоится относительно соответст-
вующей системы отсчета. Скорость V является скоростью движения механической системы как целого с отличным от
нуля импульсом. Очевидно, формула (I.19) для V представляет собой полную производную по времени от выражения:
∑mara
R = |
a |
(I.20) |
∑ma |
a
Можно сказать, что скорость механической системы как целого есть скорость перемещения в пространстве точки,
радиус – вектор которой R называется центром инерции.
18
Момент импульса
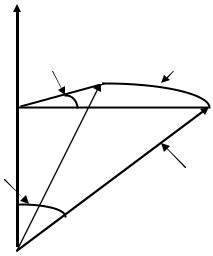
dϕ
dφ |
dr |
|
θ r
Рис.1. Вектор dϕ бесконечно малого поворота и изменение вектора dr
Сохранение момента импульса связано с изотропией пространства, которая означает сохранение механических свойств замкнутой системы при любом повороте ее как целого в пространстве. Поскольку при таком повороте не меняются свойства системы, то не должна меняться и функция Лагранжа, описывающая эти свойства. Рассмотрим бесконечно малый поворот системы и положим, что ее функция Лагранжа при этом не изменяется. Введем вектор dϕ беско-
нечно малого поворота, абсолютная величина которого равна углу dϕ , а направление совпадает с осью поворота (Рис.1.).
Найдем изменение вектора dr , проведенного из начала координат в произвольную точку поворачиваемой системы. Линейное перемещение конца радиус–вектора связано с углом соотношением:
19
| dr |=| r | sinθ dϕ |
(I.21) |
Поскольку направление поворота перпендикулярно плоскости, проходящей через dϕ и r , ясно, что
dr = [dϕ , r ] |
(I.22) |
Так как при повороте системы меняется направление всех ее векторов, то
dv = [dϕ ,v] |
|
|
|
|
|
|
|
|
|
|
|
(I.23) |
|||
Условия постоянства L при повороте означает что: |
|||||||||||||||
dL = |
∑a |
|
∂L |
|
|
+ |
∂L |
|
|
= 0 |
|
(I.24) |
|||
|
|
dra |
|
dva |
|
||||||||||
∂ra |
∂va |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
∂L |
|
|
|
|
|
∂L |
|
• |
|
|
Заменяем в (I.24) |
|
= p |
и |
|
= p . Получаем с учетом |
||||||||||
∂va |
|
|
∂ra |
||||||||||||
|
|
|
|
|
|
|
a |
|
|
|
a |
|
|||
(I.22) и (I.23): |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
• |
|
|
|
|
|
|
|
= 0 |
|
|
|
|
|
|
∑ pa dra + pa dva |
|
|
|
|
|
||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
|
|
|
|
|
|
|
|
|
|
|
|
= 0 |
(I.25) |
∑ pa [dϕ a , ra ] |
+ pa [dϕ a , va ] |
||||||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
|
|
|
|
|
= |
0 |
|
|
|
dϕ a ∑ |
[ra , pa ] + [va , pa |
] |
|
|
|||||||||||
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dϕ a мы вынесли за знак суммы потому, что он одинаков для всех точек системы и поэтому не зависит от номера частицы a. Ввиду произвольности dϕ a , отсюда следует, что:
20