Материал: Автоматизація процесу абсорбції природного газу
Отже, n=2;05 /Т=1.68=> Т=54.5/1.68=32.44с09 /Т=3.89=> Т=119.5/3.89=30.72c=(32.44с +30.72c)/2=31.58c.
Розмірний коефіцієнт передачі ОР з експериментальної кривої
розгону визначаю за формулою:
![]() ,
,

Отже, маємо наступну функцію передачі:
Моделюю ОР в середовищі Simulink:
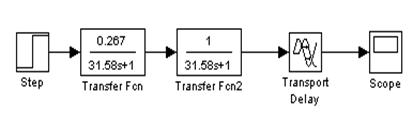
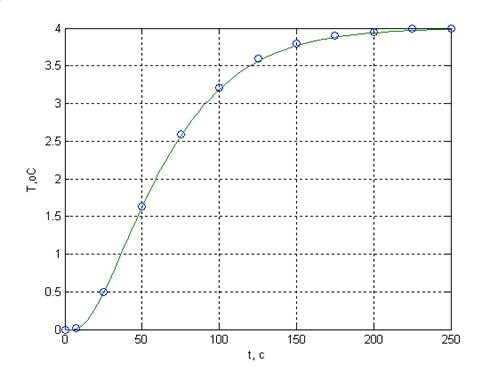
Рис. 1.9 Порівняльний графік експериментальної та аналітичної
нормованих перехідних функцій при зміні положення РО на 15%
.3 Розрахунок параметрів настроювання регулятора
Будь-яка промислова CАР крім стійкості повинна забезпечувати якісні показники процесу регулювання. Якість процесу регулювання для стабілізуючих CАР зазвичай оцінюють по перехідній функції по відношенню до одиничного стрибкоподібного збурення, а для слідкуючих САР - по перехідній функції по відношенню до одиничного стрибкоподібного задаючого впливу.
Основними показниками якості є: час регулювання, перерегулювання, коливальність і похибка регулювання.
Крім цього, слід відмітити, що в конкретних умовах до якості регулювання можуть пред’являтися і інші вимоги, наприклад максимальна швидкість зміни значення величини і т.д.
Основним показником якості в даній САР є час регулювання, він повинен становити не більше 40с. Оскільки я використовую регулятор з І-складовою, то вона повинна усунути статичну похибку. Максимальне динамічне відхилення 0,5 OC. Для того щоб задовольнити показники якості я обрав ПІД-регулятор.
Розрахуємо параметри настройки регуляторів за допомогою оптимізаційного блоку NCD (в Simulink):
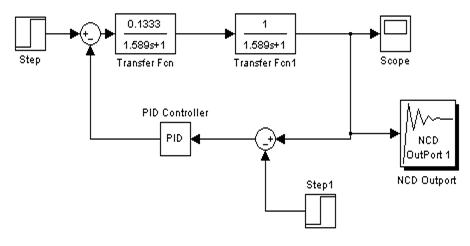
Рис. 1.10 Структурна схема об’єкта регулювання з блоком оптимізації NCD.
Отримаємо такі значення параметрів настроювання ПІД-регулятора:
Кр= 75.1132;
Ті=0.2698;Д=608.8109.
Дослідимо роботу САР при максимальній зміні збурення Хв=15%
ходу РО. Отримаємо наступний результат:
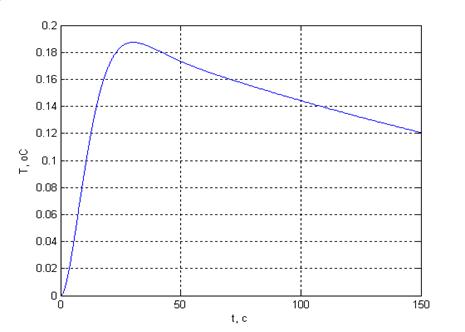
Рис.1.11 Перехідний процес при збуренні 15% ходу РО
Максимальне динамічне відхилення у1=0,188< у1доп
Час регулювання < tр.доп
Дослідимо роботу САР при зміні завдання. Отримаємо наступний
результат:
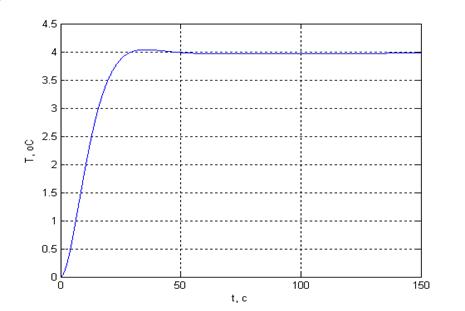
Рис.1.12. Перехідний процес зі зміною завдання
- Максимальне динамічне відхилення у1=0,06 < у1доп
Час регулювання tр=32с < tр.доп
Як бачимо показники якості перехідних процесів, які ми
отримали в результаті моделювання, задовольняються. Отже параметри настроювання
автоматичного регулятора знайдені правильно.
Висновок
В даній роботі був спроектований абсорбер з шаром насадок - кільця Рашига, для вилучення сірководню із природного газу. Метою проекту являється підбір пристроїв, які забезпечують неперервну взаємодію стікаючої вниз рідини і піднімаючого вверх газу.
Для очистки природного газу в якості абсорбера використовувався моноетаноламін. В матеріальному балансі даного абсорбера була визначена витрата поглинача. Розраховані номінальні значення процесу абсорбції у даній установці.
Для технічної реалізації системи було побудовано ФСА та підібрано технічні засоби автоматизації, по яких створено специфікацію. Описані процеси вимірювання та регулювання у кожному контурі.
Для контуру регулювання температури газу на вході в абсорбер
було розраховано оптимальні параметри настроювання регулятора.
Список літератури
1. Е. Г. Дудников “Автоматическое управление в химической промышленности”, М. : Химия 1987 р. 368 с.
. Преображенский В.П. Теплотехнические измерения и приборы. М.: Энергия. 1978. 704 с.
. А. Л. Коуль, Ф. С. Ризенфельд «Очистка газа», Москва 1962
. Плановский А.Н., Николаев П.И. Процессы и аппараты химической и нефтехимической технологии. Учебник для вузов. - 3-е. Изд., М.: Химия,1987.-496с.
. Голубятников В.А., Шувалов В.В. Автоматизация производственных процессов и АСУП в химической промышленности. - М.Химия, 1989.- 376с.,ил.
. ГОСТ 21.404 - 85. Автоматизация технологических процессов. Обозначения условные приборов и средств автоматизации в схемах. - М.: Стандартиздат, 1985.
. Лащинский А.А. Основы конструирования и расчета химической аппаратуры / А.А. Лащинский, А.Р. Толчинский. - М.: Машиностроение, 1963. - 572 с.
. Романков П.Г. Процессы и аппараты химической промышленности: учеб. пособие для техникумов / П.Г. Романков, М.И. Курочкина, Ю.Я. Мозжерин. - Ленинград: Химия, 1989. - 560 с.