Материал: Автоматизація процесу абсорбції природного газу
температура абсорбенту на виході з теплообмінника;
витрата газу на вході в абсорбер;
витрата газу на виході з абсорбера;
перепад тисків у колоні;
рівень насиченого абсорбенту.
Контури в яких проводиться сигналізація:
температура газу на виході з теплообмінника;
температура абсорбенту на виході з теплообмінника;
перепад тисків у колоні;
рівень насиченого абсорбенту;
концентрація H2S після процесу абсорбції.
2.4 Функціональні ознаки систем автоматизації
|
№ п/п |
Обсяг автоматизації Назва параметра |
Показ |
Реєстрація |
Сигналізація |
Дистанційне керування |
Автоматичне регулювання |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
1 |
витрата газу на вході в абсорбер |
+ |
|
|
|
+ |
|
2 |
витрата газу на виході з абсорбера |
+ |
|
|
|
+ |
|
3 |
рівень рівень насиченого абсорбенту |
+ |
|
+ |
|
+ |
|
4 |
температура газу на вході |
+ |
|
+ |
|
+ |
|
5 |
температура абсорбенту на вході |
+ |
|
+ |
|
+ |
|
6 |
концентрація H2S у очищеному газі |
+ |
|
+ |
|
|
|
7 |
перепад тиску у колоні |
+ |
|
+ |
|
+ |
.5 Порівняльний аналіз існуючих схем автоматизації
технологічного процесу
Для регулювання процесу абсорбції застосовують також каскадні системи автоматизації.
Регулювання процесом абсорбції можна здійснювати зміною
подачі газу з корекцією по температурі, але така система буде менш
продуктивною. Або регулювання співвідношенням витрат газу та абсорбенту з
корекцією по концентрації вилучуваного газу із суміші.
.6 Синтез оптимальної спрощеної системи автоматизації для
заданих умов роботи об’єкта
На основі виконаного аналізу ТОК і
враховуючи конкретні умови роботи ТОК синтезуємо схему, яка враховує конкретні
умови роботи ТОК та найкраще забезпечують функціональні, технічні, метрологічні
вимоги до системи автоматизації, необхідні показники перехідного процесу в
окремих контурах регулювання та функціональні ознаки проектованої системи.
Рис. 1.6 Спрощена функціональна схема автоматизації абсорбційної колони
1-9 - теплообмінники; 2 - контур регулювання температури
газу;3 - контур вимірювання показу і регулювання витрати; 4 - абсорбційна
колона; 5 - контур регулювання та сигналізації рівня абсорбенту у колоні; 6 -
контур регулювання та сигналізації перепаду тиску у колоні; 7 - контур
регулювання та сигналізації концентрації H2S; 8 - контур вимірювання
та показу витрати очищеного газу; 10 - контур вимірювання регулювання та показу
температури абсорбенту.
.7 Вибір технічних засобів автоматизації (ТЗА)
При виборі технічних засобів автоматизації (ТЗА) треба враховувати енергетичні та функціональні ознаки систем автоматичного регулювання (САР), характер технологічного процесу, екологічний стан довкілля, параметри та фізико-хімічні властивості вимірюваного середовища, місце розміщення пунктів управління та контролю стосовно технологічних об’єктів, необхідну точність і швидкодію. Крім того беруть до уваги такі фактори, як пожежо- і вибухобезпечність, агресивність, токсичність середовищ, а також інші фізико-хімічні властивості речовин.
Для складання ФСА вибирають конкретні технічні засоби автоматизації, які і визначають структуру окремих контурів автоматизації. Під час вибору ТЗА необхідно враховувати: особливості технологічного процесу, умови пожежо- і вибухонебезпечності, агресивність і токсичність оточуючого середовища, Параметри і фізико-хімічні властивості контрольованих середовищ, радіус дії засобу, необхідну точність і швидкодію ТЗА. Систему автоматизації технологічного процесу реалізують, як правило, на базі серійних ТЗА з уніфікованими вхідними та вихідними сигналами. ТЗА повинні забезпечувати функціональні ознаки окремих контурів регулювання.
Отже, врахувавши вище вказані вимоги, приймемо наступні рішення, щодо вибору технічних засобів автоматизації:
Температуру неочищеного газу та температуру абсорбенту вимірюватимемо з допомогою давачів температури типу ТСМ 1088, які безпосередньо під’єднуються до регуляторів МИК 12 фірми МІКРОЛ. З регулятора аналоговий сигнал поступає на блок ручного управляння БРУ-5, який подає аналоговий сигнал керування на електропневматичний перетворювач Самсон 6116-4. З них уніфікований пневматичний сигнал надходить на пневматичний ВМ з клапаном регулювання Самсон 240. Така система керування клапанами застосована у кожному контурі регулювання.
Витрати газу вимірюємо з допомогою діафрагм типу ДКС-10-175
та дифманометрів типу Сапфір-22ДД 2410, регулювання проводимо по попередній
схемі, а показ очищеного газу реалізуємо з допомогою мікропроцесорного
індикатора ІМТ 11. Різницю тисків перетворюємо в уніфікований струмовий сигнал
з допомогою дифманометра Сапфір-22ДД 2410. Рівень у абсорбційній колоні
вимірюємо радарним мікрохвильовим рівнеміром SITRANS LG200 з уніфікованим
вихідним сигналом. Концентрацію H2S у очищеному газі вимірюватимемо
з допомогою хроматографічного газоаналізатора GC100 Mark II фірми YOCOGAWA.
.8 Проектування загальної ФСА
На основі вибраних засобів автоматизації проектуємо загальну
ФСА абсорбції, яка входить в склад проекту при розробці технічної документації
на всіх стадіях проектування.
Специфікація на засоби автоматизації
|
№ позиції |
Назва параметра |
Назва засобу та коротка технічна характеристика |
Тип |
К-ть |
|
2 |
3 |
5 |
6 |
7 |
|
1-1 7-1 |
Температура |
Термоперетворювач опору з номінальною статичною характеристикою 50М. Діапазон вимірювання -50…+180°С Клас допуску - В. |
ТСМ-1088 |
2 |
|
1-2 2-3 3-2 4-2 5-2 7-2 |
|
Одноканальний аналоговий мікропроцесорний ПІД-регулятор з умовним тиском середовища 0,4 мРа. Має функцію індикації двох величин. Має сигналізацію відхилень від значень min та max, функцію добування квадратного кореня.ТО з номінальною статичною характеристикою 50М. |
МІК-12 |
6 |
|
1-3 2-4 3-3 4-3 5-3 7-3 |
БРУ-5-3-220 |
6 |
||
|
1-4 2-5 3-4 4-4 5-4 7-4 |
|
Електропневматичний перетворювач: Вхідні сигнали: 4 ... 20мА. Вихідні сигнали: 20 ... 100кПа, 40 ... 200кПа. Лінійність: ± 0,2% шкали. Гістерезис: ± 0,3% шкали. Відтворюваність: ± 0,1% шкали. Тиск підведеного повітря: при вих. сигналі 20 ... 100 кПа: 140 кПа; Параметри навколишнього середовища: температура: -30 ... 70 ° С. |
Самсон 6116-4 |
6 |
|
1-5 2-6 3-5 4-5 5-5 7-5 |
|
Пневматичний мембранний регулюючий клапан: Вхідний сигнал: 20 … 100 кПа. |
Самсон 240 |
6 |
|
2-1 6-1 |
Витрата |
Діафрагма камерна |
|
|
|
2-2 3-1 6-2 |
|
Вимірювальний перетворювач різниці тисків, з уніфікованим струмовим вихідним сигналом 4-20мА. Верхня межа вимірювання -3 кг/см2. Клас точності 0.15. Напруга живлення 24-36 В постійного струму, від 50 до 60 Гц. Споживана потужність 0,85 В·А. |
САПФИР-22ДД-2410 |
3 |
|
4-1 |
Рівень |
Сигналізатор рівня радарний мікрохвильовий. Діапазон: 0-20 м. Вимірюване середовище: рідина, сипкі речовини. Температура вимірюваного середовища: -40… 200 °C Тиск в системі: до 40 бар Матеріал: нержавіюча сталь 1.4404, пластик (корпус). Вихід: 4-20 мА. |
SITRANS LG200 |
1 |
|
5-1 |
Концентрація |
Газоаналізатор хроматографічний. Вимірювань t середовище: газ. Діапазон вимірів:FPD: 1ррm ... 0,1%. Максимальна кількість вимірюваних компонентів 255. Відтворюваність ± 1% шкали. Параметри навколишнього середовища температура: -10 ... 50 ° С; вологість: <95%. Виходи: аналоговий: 4 ... 20 мА (36 точок); порт зв'язку: RS422/RS232; пневматичні виходи до вентилів системи відбору проб: 8. Живлення 220 В / 50 Гц. |
GC100 Mark II |
1 |
.9 Опис ФСА
. Контури регулювання температури газу та абсорбенту
Вимірювання температури здійснимо термометром опору ТСМ-1088. Його підключаємо до аналогового регулятора МІК-12 з нього сигнал керування подаємо через блок ручного управління БРУ-5 який у свою чергу подає сигнал на електропневматичний перетворювач Самсон 6116-4, який подає пневматичний сигнал на регулюючий клапан Самсон 240 і той змінює витрату води, що подається у теплообмінник.
. Контур регулювання витрати газу на вході в колону
Вимірюємо витрату за допомогою діафрагми ДКС-10-175 та дифманометра Сапфір 22ДД який подає вихідний сигнал 4-20 мА на вхід регулятора МІК-12. Регулятор формує вихідний сигнал за законом регулювання і подає його на блок ручного управління БРУ-5 який у свою чергу подає сигнал на електропневматичний перетворювач Самсон 6116-4, котрий подає пневматичний сигнал на регулюючий клапан Самсон 240 і керує витратою газу.
. Контур регулювання перепаду парціального тиску в абсорбційній колоні
Різниця тисків на вході та виході з колони вимірюється дифманометром Сапфір 22ДД і у вигляді уніфікованого сигналу 4-20 мА подаються на регулятор МІК-12. Він опрацьовує значення різниці тисків та подає сигнал на блок ручного управління БРУ-5 який у свою чергу подає сигнал на електропневматичний перетворювач Самсон 6116-4, який керує регулюючим клапаном Самсон 240 і регулює тиск у абсорбційній колоні.
. Контур регулювання рівня насиченого абсорберу у колоні
Рівень насиченого абсорбенту у колоні вимірюється радарним мікрохвильовим рівнеміром SITRANS LG200. З нього уніфікований сигнал надходить на регулятор, який подає сигнал керування на блок ручного управління БРУ-5 який у свою чергу подає сигнал на електропневматичний перетворювач Самсон 6116-4 і керує регулюючим клапаном Самсон 240 змінюючи витрату насиченого абсорбенту що виходить з колони.
. Контур регулювання концентрації вилучуваного елемента у очищеному газі
Концентрація газу (Н2S, CO2) вимірюється хроматографічним газоаналізатором GC100 Mark II. З нього сигнал 4-20 мА надходить на МІК-12 який, опрацювавши сигнал, керує роботою блоку ручного управління БРУ-5, електропневматичного перетворювача Самсон 6116-4 та регулюючого клапана Самсон 240 змінюючи кількість абсорбенту.
. Контур вимірювання та реєстрації витрати очищеного газу
На трубопроводі після колони встановлюється діафрагма
ДКС-10-175, перепад тиску на якій вимірюється дифманометром Сапфір 22ДД. З
нього уніфікований сигнал надходить на мікропроцесорний індикатор, який
опрацьовує цей сигнал і показує значення витрати очищеного газу у трубопроводі.
. Розрахунок САР
.1 Розрахунок моделі об’єкту регулювання
Математичну модель об'єкта регулювання для розрахунків оптимальних параметрів настройки регулятора знаходимо у вигляді функції передачі.
Регулюємо температуру абсорбенту.
Функцію передачі даного контуру буду знаходити з перехідної
функції при зміні положення РО на 15% :
|
t, oC |
20 |
20.2 |
20.5 |
20.8 |
21.35 |
21.6 |
21.8 |
21.85 |
21.9 |
21.95 |
22 |
22 |
|
t, с |
0 |
7 |
25 |
50 |
75 |
100 |
125 |
150 |
175 |
200 |
225 |
250 |
Будую в середовищі MATLAB графік перехідної функції при зміні відкриття РО на 15%:
t=[0 7 25 50 75 100 125 150 175 200 225 250];=[20 20.2 20.5
20.8 21.35 21.6 21.8 21.85 21.9 21.95 22 22];(t,y,'*');grid; xlabel('t, c');
ylabel('T,oC');
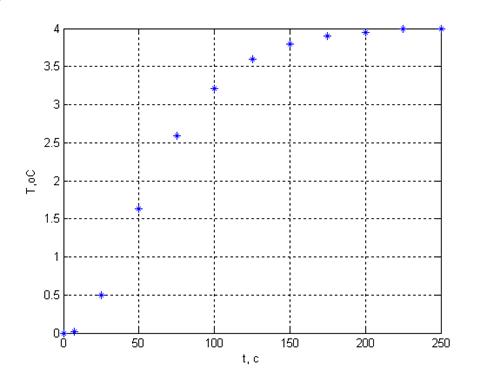
Рис. 1.7 Графік перехідної функції при зміні положення РО на
15%.
.2 Розрахунок основних параметрів ТОК
На основі отриманої перехідної функції визначаю основні
параметри математичної моделі об’єкта. За її виглядом обираю для апроксимації
функцію передачі у вигляді:
![]()
де Т - стала часу; n - кількість аперіодичних ланок; τ - час запізнення; k - розмірний коефіцієнт передачі ОР.
З графіка перехідної функції при зміні відкриття РО на 15%
відразу можемо визначити час запізнення τ =6с. Для знаходження параметрів
математичної моделі спочатку криву розгону ОР нормую діленням її значень на
максимальну зміну вихідної величини:
![]() :
:
![]() ,
,
=[20 20.2 20.5 20.8 21.35 21.6 21.8 21.85 21.9 21.95 22 22];
t=[0 7 25 50 75 100 125 150 175 200 225 250];=y/4;(2);
plot(t,dy);grid; xlabel('t, c'); ylabel('T,oC');
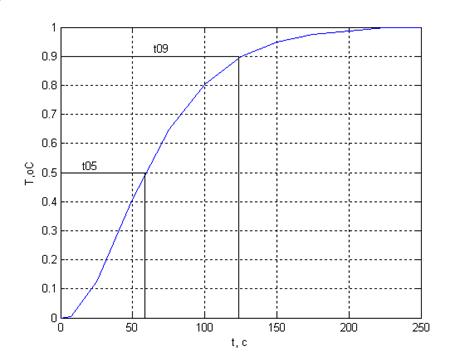
Рис. 1.8 Графік нормованої перехідної функції при зміні
положення РО на 15%.
З нормованої експериментальної перехідної функції знаходжу значення часу t05 i t09, що відповідають значенням перехідної функції Те(t05) = 0.5 i Те(t09) = 0.9, і розраховуюю відношення t05 /t09 .05=54.509=119.505 /t09=54.5/119.5=0,456
З таблиці 1 знаходжу найближче до розрахованого відношення t05/t09
табличне значення і відповідне йому значення n.
Таблиця 1.
|
n |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
t05 /Т |
1.68 |
2.67 |
3.67 |
4.67 |
5.67 |
6.67 |
7.67 |
8.69 |
9.69 |
|
t09 /Т |
3.89 |
5.32 |
6.68 |
7.99 |
9.27 |
10.53 |
11.77 |
12.99 |
14.21 |
|
t05 /t09 |
0.43 |
0.5 |
0.55 |
0.58 |
0.61 |
0.63 |
0.65 |
0.67 |
0.68 |