Материал: А27819 Лазарев В.Л. Робастое управление
например, до величины C2. Этому соответствует переход изображающей точки с изотропы, заданной условием e = C1, на изотропу, которая задана условием e = C2 (C2 C1). В результате такого перехода энтропийный потенциал уменьшится на величину  e C1 C2 . При этом, в частности, уменьшение уровня состояния неопределенности может быть достигнуто за счет незначительного возрастания величины и более значительного уменьшения величины Ke, как, например, при переходе из состояния, описываемого точкой 2, в состояние, описываемое точкой 3. В этом случае имеют место условия: 3
e C1 C2 . При этом, в частности, уменьшение уровня состояния неопределенности может быть достигнуто за счет незначительного возрастания величины и более значительного уменьшения величины Ke, как, например, при переходе из состояния, описываемого точкой 2, в состояние, описываемое точкой 3. В этом случае имеют место условия: 3  2; Ke3
2; Ke3  Ke2. Возможна и обратная ситуация, как, например, при переходе в состояние, описываемое изображающей точкой 4. В этом случае 4
Ke2. Возможна и обратная ситуация, как, например, при переходе в состояние, описываемое изображающей точкой 4. В этом случае 4  2; Ke4 Ke2. Также реальной является ситуация, когда уменьшение энтропийного
2; Ke4 Ke2. Также реальной является ситуация, когда уменьшение энтропийного
потенциала объекта на |
величину |
э |
достигается одновременным |
|
|
|
|
уменьшением величин |
и Ke, как, например, при переходе в состояние, |
||
характеризуемое точкой 5, когда 5 |
2; Ke5 Ke2. Величина э , в об- |
||
щем случае, может быть выражена через величины приращений σ и Ke , характеризующих изменение состояния неопределенности объекта по соответствующим координатам, в виде
e |
e1 e2 (Ke Ke )(σ σ) Keσ Ke σ σ Ke |
Ke |
σ. (8.18) |
|
Если величины приращений достаточно малы, |
т. е. |
σ 0, |
Ke |
0, то последним слагаемым в выражении (8.18) |
можно прене- |
|
бречь и изменение энтропийного потенциала будет характеризоваться его дифференциалом
d e Ke dσ σdKe . |
(8.19) |
Используя выражение (8.19), можно описать неизменность состояния неопределенности объекта в пространстве энтропийных потенциалов. Такая модель может быть найдена из условия d e 0 , которое, очевидно, соответствует перемещению изображающей точки
по изотропе |
e |
C . В результате получим |
|
|
Ke dσ σdKe |
0 |
, или |
dKe |
|
dσ |
, или d ln Ke |
d ln σ . (8.20) |
Ke |
|
σ |
|||||
|
|
|
|
|
|
||
|
|
|
|
146 |
|
|
|
Из сделанного выше определения изотроп следует, что они не имеют точек пересечения. Доказательство этого утверждения офор-
мим в виде следующей леммы. |
|
Лемма 1. Изотропы, соответствующие условию e |
= const, не |
имеют точек пересечения. |
|
Доказательство. Доказательство сделанного утверждения про- |
|
ведем методом от противного. Предположим, что изотропы |
e1 = const |
иe2 = const ( e1  e2) пересекаются в какой-либо точке. Следователь-
e2) пересекаются в какой-либо точке. Следователь-
но, в данном случае имеет место равенство e1 =  воречие. Что и требовалось доказать.
воречие. Что и требовалось доказать.
Изменение состояний неопределенности объекта будет характеризоваться перемещением изображающей точки на плоскости ЭП, которая будет описывать некоторую линию – траекторию в области параметров энтропийных потенциалов или, более кратко, энтропийную траекторию. Совокупность энтропийных траекторий для различных вариантов изменения состояний образует портрет энтропийных потенциалов или, более кратко, энтропийный портрет системы.
В отличие от классических фазовых портретов динамических систем (когда в качестве координат фазового пространства берутся выходная координата объекта и ее производные до (n – 1) порядка) энтропийные портреты имеют следующие особенности:
а) направление энтропийных траекторий может быть любым в отличие от траекторий на фазовой плоскости (в верхней полуплоскости «слева–направо», в нижней – «справа–налево»);
б) энтропийные портреты обладают большей информативностью, позволяя повысить степень «сжатия» информации об изменении состояний объекта или системы.
Наглядная иллюстрация указанных особенностей приведена на рис. 8.2. На рис. 8.2, а изображен фазовый портрет линейной системы второго порядка, находящейся на колебательной границе устойчивости. Изменение выходного параметра в этом случае описывается зависимостью y = Asin( t + ). Траектории 1, 2 и 3 соответствуют различным начальным отклонениям, задающим амплитуды А незатухающих колебаний. Очевидно, что каждая фазовая траектория характеризуется своей величиной СКО – , причем имеет место соотношение 1  2
2  3.
3.
147
а |
б |
|
|
Ke |
|||
|
|
||
|
|
|
Рис. 8.2. Портреты систем:
а – фазовый портрет; б – энтропийный портрет
Плотность распределения отклонений выходной величины y относительно среднего значения в данном случае описывается так называемым арксинусоидальным законом (см. табл. 2.1) с Ke = 1,11. Таким образом, каждой фазовой траектории на рис. 8.2, а будет соответствовать точка на энтропийной плоскости (рис. 8.2, б) с координатами ( i; 1,11); (i = 1, 2, 3). Аналогичным образом можно проиллюстрировать другие варианты динамики, например, наличие устойчивого или неустойчивого предельных циклов и др. Более подробно эти вопросы рассмотрены в работах [18, 21].
Проиллюстрируем практическую применимость изложенного подхода конкретными примерами [19].
Рассмотрим вращение точки N на плоскости. В первом случае будем считать, что R (расстояние от оси вращения до точки N)
и(угловая скорость) – постоянны. Комплексная модель данного ди-
намического процесса во времени t будет иметь вид z , а векторная – y Rsin(ωt) . Соответствующая данному процессу фазовая траектория на фазовой плоскости в системе координат x, y = dx/dt будет представлять собой эллипс (кривая 1 на рис. 8.3, а). Это же движение с позиции стороннего наблюдателя, не имеющего аналитического описания такого процесса, можно представить совокупностью проекций точки N на какую-либо ось (например, X), являющихся случайными величинами с соответствующим уровнем непредсказуемости или неопределенности. Распределение данных величин
148
будет характеризоваться арксинусоидальным законом распределения
с Ke = 1,11 и σ R / 
 2 . Данной ситуации, как было показано выше, соответствует изображающая точка 1 на плоскости энтропийных потенциалов (в системе координат , Ke) на рис. 8.3, б. В геометрической интерпретации значение величины соответствующего энтро-
2 . Данной ситуации, как было показано выше, соответствует изображающая точка 1 на плоскости энтропийных потенциалов (в системе координат , Ke) на рис. 8.3, б. В геометрической интерпретации значение величины соответствующего энтро-
пийного потенциала |
e будет равно площади прямоугольника со сто- |
||
ронами и Ke. |
|
|
|
а |
б |
||
|
|
|
|
|
|
2,07 |
|
|
|
|
|
|
|
1,11 |
|
Рис. 8.3. Портреты системы:
а – фазовый портрет; б – энтропийный портрет; 1 – детерминированный режим вращения; 2 – режим вращения с одной нечеткой
переменной ( ); 3 – режим вращения с двумя нечеткими переменными ( и R)
Теперь рассмотрим случай, когда угловая скорость является случайной величиной. Такая ситуация встречается довольно часто в различных практических задачах и связана, например, с изменениями нагрузочных моментов на валах двигателей. Подобные задачи возникают при исследовании режимов работы шнековых питателей при неравномерной подаче материалов с различными физическими свойствами, кавитации на лопастях гребных винтов с регулируемым шагом в условиях интенсивного волнения и др. В качестве точки N может, например, рассматриваться точка на поверхности лопасти, где разрушение поверхности происходит наиболее интенсивно. В данном
149
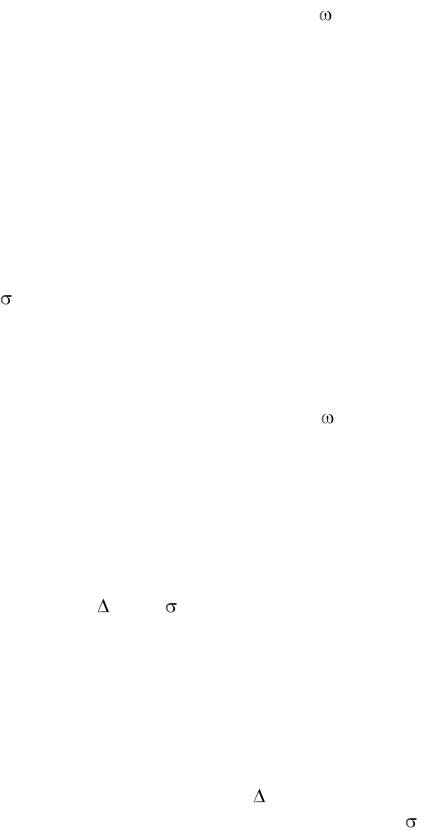
случае использование вышеупомянутых аналитических моделей для описания такого движения оказывается затруднительным, так как в них появляется нечеткая или «размытая» переменная . Соответствующий фазовый портрет также оказывается «размытым» и представляется в виде полосы переменной ширины с неявно выраженной границей (полоса 2 на рис. 8.3, а). Причем процедура его построения существующими методами (например, методом изоклин) потребует больших трудозатрат, чем в первоначальном варианте. Применение методов интервальной логики также оказывается не всегда эффективным. Достаточно просто и наглядно эта ситуация будет характеризоваться изменением энтропийного потенциала. Очевидно, что произойдет изменение закона распределения параметра (наиболее вероятно, что возрастет уровень его непредсказуемости, а следовательно, и значение энтропийного коэффициента) и, возможно, изменение значения величины . Динамика точки N в таком установившемся случайном режиме будет характеризоваться точкой 2 на плоскости ЭП (рис. 8.3, б) с соответствующей величиной энтропийного потенциала. Пунктирной линией показана возможная энтропийная траектория перехода в данное состояние из детерминированного режима.
Теперь рассмотрим общий случай, когда величины и R являются случайными величинами, что также характерно для многих практических задач. Наличие двух нечетких переменных еще больше усложняет использование аналитических моделей, а на соответствующем фазовом портрете появится дополнительная составляющая «размытости», что делает его еще менее информативным (полоса 3 на рис. 8.3, а). Наглядность энтропийного портрета остается прежней. Нахождение системы в новом динамическом режиме будет характеризоваться новыми значениями e, Ke и , чему соответствует точка 3 на рис. 8.3, б. Пунктирными линиями показаны возможные траектории перехода в это состояние из предыдущих режимов.
Следует отметить, что предлагаемый подход к исследованию различных явлений не противоречит «классике». Если априори пренебречь изменением закона распределения параметра на различных этапах существования системы и считать, что распределение параметра подчиняется какому-либо одному закону (например, нормальному
с Ke = Ke(max) = 2,07), то соответствующее значение e, согласно формуле (8.14), будет являться масштабным изображением величины .
150