Материал: А27819 Лазарев В.Л. Робастое управление
в точке |
2n |
Dn |
. Очевидно также, что такие запретные области |
||||||||||||||
D max |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
задают порядок астатизма синтезируемой системы r условием r |
n. |
||||||||||||||||
4. Известны дисперсия воздействия D0 и его первая производ- |
|||||||||||||||||
ная D1. В таком случае можем записать |
|
|
|||||||||||||||
|
|
|
|
|
D max |
|
|
C0 D0 |
|
|
C1D1 ; |
|
|||||
|
|
|
|
|
|
) |
|
2 |
C |
0 |
C |
2 . |
(6.44) |
||||
|
|
|
|
|
W ( j |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
||||||
Проанализируем правую часть неравенства (6.44). Очевидно, |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
что при |
малых |
значениях |
|
|
|
|
|
|
С0 |
|
второе слагаемое |
будет |
|||||
|
|
|
|
|
|
С1 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
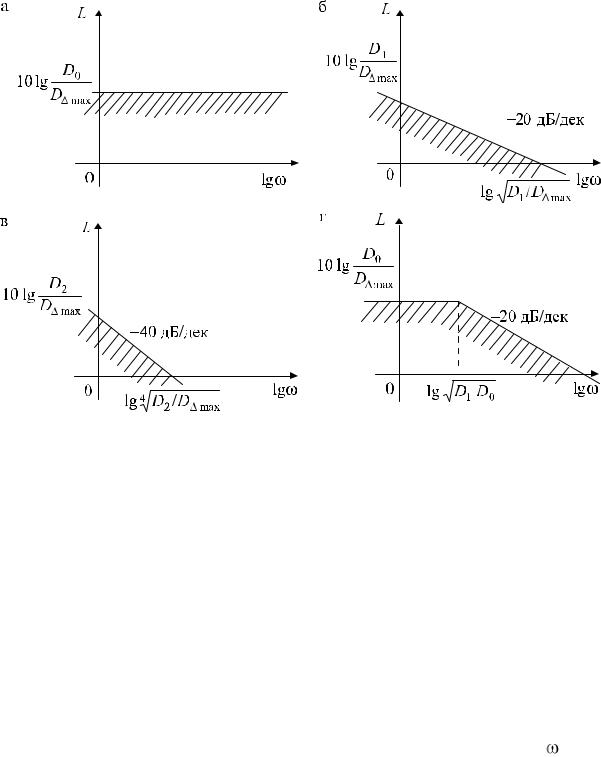
меньше первого и им можно пренебречь. В данном случае условие (6.44) сведется к условию (6.38), т. е. к ситуации, рассмотренной
в примере 1. Для этого диапазона частот 0 |
|
С0 |
|
уравнение |
С1 |
|
|||
|
|
|
|
границы запретной зоны для ЛАХ будет определяться выражени-
ем (6.39). Для остального диапазона частот |
|
С0 |
|
второе |
С1 |
|
|||
|
|
|
|
слагаемое будет больше первого, что позволяет пренебречь первым слагаемым, и условие (6.44) сведется к условию (6.40) (см. пример 2), которое определит границу запретной области для ЛАХ в виде выражения (6.41). Очевидно, что искомая граница запретной области будет аппроксимирована двумя асимптотами, сопрягающимися в точ-
ке |
с |
|
С0 |
|
|
|
D1 |
|
. Максимальная погрешность аппроксимации |
|
С1 |
D0 |
|||||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
имеет место в точке сопряжения и будет убывать по мере удаления от нее в обе стороны. Запретная область для ЛАХ на рис. 6.4, г находится ниже ломаной асимптоты и заштрихована.
Рассуждая аналогично, можно определить запретные области и для других возможных сочетаний известных величин дисперсий. Очевидно, что с увеличением числа известных величин дисперсий увеличивается и число членов аппроксимирующего полинома (6.28),
121
что, в свою очередь, приведет к появлению дополнительных точек сопряжения и сопрягающих частот. Более подробно эти вопросы рассмотрены в работе [2].
Рис. 6.4. Запретные области для ЛАХ разомкнутой системы:
а– при известной величине D0; б – при известной величине D1;
в– при известной величине D2; г – при известной величине D0 и D1
Если на систему действует возмущающее воздействие, то согласно выражению (6.21) общая дисперсия выходной величины возрастает на величину дисперсии, обусловленной действием этого возмущения Dy( f ) . Ограничение величины Dy( f ) можно также задать
соответствующей запретной областью для ЛАХ в диапазоне высоких частот.
Однако аналитическое решение такой задачи сопряжено с большим объемом вычислительных работ. Поэтому на практике для учета действия различного рода возмущений (помех) обычно пользуются понятием эквивалентной полосы пропускания системы э, которая определяется из выражения
122
Ф ( j ) 2 d
|
_ |
|
. |
|
(6.45) |
||
э |
|
|
|
||||
|
|
||||||
|
Ф2 (0) |
|
|
|
|||
|
|
|
|
|
|||
Из выражения (6.45) видно, что понятие величины э опреде- |
|||||||
ляется из прямоугольника, стороны которого равны |
э и Ф2(0), а его |
||||||
|
) |
|
2 . Как отмеча- |
||||
площадь равна площади, ограниченной кривой |
Ф( j |
|
|||||
лось выше, в ряде практических случаев (особенно при наличии инерционных объектов управления) спектральный состав возмущений превышает полосу пропускания системы. Поэтому можно допустить, что в пределах полосы пропускания системы величина Sf ( ) изменяется незначительно и с достаточной точностью считать ее постоянной и равной значению, которое достигается при  = 0, т. е. S(0). Другими словами, возмущения представляются в виде так называемого «белого шума». В данном случае оказывается достаточно просто определить величину дисперсии Dy( f )
= 0, т. е. S(0). Другими словами, возмущения представляются в виде так называемого «белого шума». В данном случае оказывается достаточно просто определить величину дисперсии Dy( f )
Dy( f ) |
|
Ф ( j ) |
|
2 S f ( |
) d |
|
Ф ( j |
) |
|
2 S (0) d |
|
|||
|
|
|
|
|
||||||||||
|
|
|
) |
|
2 d |
|
|
(6.46) |
||||||
|
|
S(0) |
Ф( j |
|
S(0) |
э . |
||||||||
Для определенности считаем, что Ф(0) = 1. Для удобства определения величины Dу(f) по выражению (6.46) на практике пользуются готовыми зависимостями для э от параметров передаточных функций. Такие зависимости выведены для различных типов звеньев и вариантов систем и приведены в справочной литературе. Однако при необходимости данные зависимости могут быть получены из выра-
жения (6.45).
Рассмотрим примеры.
1. Требуется определить эквивалентную полосу пропускания апериодического звена первого порядка с известными параметрами k
123
и Т. Передаточная функция такого звена имеет вид: |
W ( p) |
k |
|
|
|||
Tp 1 |
|||
|
|
и W(0) = k.
Согласно выражению (6.45), имеем
|
|
W ( j ) |
|
2 d |
1 |
|
k 2d |
|
|
|
|
|
d |
|||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
э |
|
W 2 (0) |
|
k 2 |
|
T ( j ) |
1 |
|
2 |
|
1 j T |
|
2 |
|||||
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
d |
π |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|||
|
|
|
|
|
1 |
|
2T 2 |
T |
|
|
|
|
||||||
2. Определить эквивалентную полосу пропускания замкнутой системы, состоящей из апериодического звена первого порядка, охваченного отрицательной единичной обратной связью при известных параметрах звена k и Т.
Передаточная функция такой системы имеет вид
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
||
|
|
|
|
|
W ( p) |
|
|
k |
|
|
|
|
|
|
|
|
|
k0 |
|
|
|||
|
Ф( p) |
|
|
|
k 1 |
|
|
|
, |
||||||||||||||
|
1 W ( p) Tp k 1 |
|
T |
|
|
|
T0 p 1 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
1 p |
1 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где k0 |
|
k |
|
, T0 |
|
T |
– коэффициент передачи и постоянная вре- |
||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||
|
k |
|
1 |
|
k 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
мени замкнутой системы, соответственно.
Очевидно, что такая система в динамическом отношении также является апериодическим звеном первого порядка только с измененными параметрами k0 и Т0. Поэтому для определения э можно воспользоваться результатами предыдущего примера, минуя промежуточные расчеты. Окончательно имеем
|
π |
|
(k 1) π |
. |
э |
|
|
||
T0 |
|
T |
||
|
|
|||
124
Из рассмотренных примеров в частности следует вывод о том, что «охват» статического инерционного звена отрицательной обратной связью через статическое звено (в данном примере с единичным коэффициентом передачи) приводит к увеличению его полосы пропускания и повышению быстродействия.
Задаваясь предельными значениями величины Dу(f) и зная характеристику возмущения в виде S(0), нетрудно рассчитать значение величины э для замкнутой системы из выражения
|
Dy( f ) |
(6.47) |
|
э |
|
. |
|
|
|||
S(0) |
|
||
|
|
||
Теперь, используя известные зависимости величины |
э от па- |
||
раметров системы и зная передаточную функцию разомкнутой системы, представляется возможным получить оценку верхней границы разрешенной области для ЛАХ разомкнутой системы.
Если же в силу специфических особенностей конкретного возмущения его спектральную плотность Sf ( ) нельзя считать постоянной в пределах полосы пропускания системы, то синтез системы можно осуществить методом последовательных приближений. В этом случае на каждом промежуточном шаге определяют вариант системы в виде соответствующей ЛАХ, которая строится с использованием запретных областей, обеспечивающих ограничение динамической ошибки, затем определяется величина Dу(f) и проверяется выполнение исходного требования по обеспечению точности ее работы в виде условия (6.14). После соответствующих уточнений, обычно в виде оценки верхней границы разрешенной области для ЛАХ разомкнутой системы, приступают к следующему шагу итерации и т. д.
При наличии разрешенной области для ЛАХ разомкнутой системы дальнейший синтез сводится к построению ЛАХ желаемой системы Lж, обеспечивающей оптимизацию выбранного критерия. Если, например, в качестве критерия оптимизации выбран функционал вида (6.10), то очевидно, что задача оптимизации заключается в нахождении его минимума. Далее на этом же графике строится ЛАХ располагаемой системы Lр. Чаще всего в качестве располагаемой системы рассматривается «неварьируемая» часть системы, не содержащая корректирующих звеньев (объект управления, первичные преобразователи,
125