Материал: Sb96728
xз |
z |
k |
u1 |
|
u |
y |
W2(p) |
x |
xз |
z |
k |
u1 |
|
|
u |
y |
W2(p) |
x |
|||||
|
|
|
|
|
|
|
W1(p) |
|
|
|
|
|
|
|
|
|
W1(p) |
|
|
||||
|
|
|
|
|
|
|
|
kосp |
|
|
|
|
|
|
|u1| |
|
|
|
|
u2 |
kосp |
|
|
|
|
|
|
|
u2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
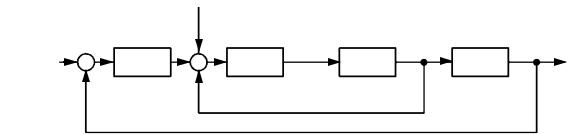
Рис. 3.2. Структурная схема системы управления: а – с линейной обратной связью; б – с нелинейным корректирующим устройством
Схема 3. Коррекция нелинейных характеристик линейным коррек-
тирующим устройством. Эффективным способом уменьшения влияния нелинейных элементов является применение местных обратных связей, охватывающих те или иные нелинейные элементы. Структурная схема такой системы приведена на рис. 3.3.
xз |
z |
(z) |
u |
Wл(p) |
|
x |
xз |
z |
|
(z) |
u |
Wл(p) |
x |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
б |
|
|
Рис. 3.3. Структурная схема нелинейной системы управления: а – без коррекции; б – с местной обратной связью
Можно подобрать параметры обратной стабилизирующей связи так, что характеристики системы не будут зависеть от свойств нелинейного элемента и амплитуды действующих на систему сигналов. Такой способ достаточно экономичен, эффективен и широко применяется на практике.
3.2. Порядок выполнения работы
1.Создать новую модель в Matlab Simulink: New Simulink Model.
2.Во вкладке Configuration Parameters/Solver задать настройки расчета переходных процессов type – fixed step; step size – 1e–4.
3.Собрать три пары расчетных схем, соответствующих структурным схемам (рис. 3.1, 3.2 и 3.3), заданным в таблице вариантов.
4.Для первого варианта схемы коррекции линейной системы нелинейным корректирующим устройством (рис. 3.1) выполнить следующие исследования. Изменяя коэффициент усиления пропорционального регулятора k в
11

исходной системе, получить различные варианты переходного процесса от монотонного до колебательного. При этом исследовать время регулирования. Затем выполнить аналогичные исследования в скорректированной системе. Добиться монотонного процесса с максимальным быстродействием.
5.Для второго варианта схемы коррекции линейной системы нелинейным корректирующим устройством (рис. 3.2) получить монотонный процесс
смаксимальным быстродействием, подбирая коэффициенты прямой и обратной связи.
6.Для схемы коррекции нелинейных характеристик линейным корректирующим устройством (рис. 3.3) построить переходную характеристику исходной системы с нелинейным звеном с насыщением. В ходе работы исследовать влияние местной обратной связи изменением коэффициента обратной связи.
7.Представить результаты исследований в виде графиков переходных процессов для каждой из исследуемых схем.
Вари- |
|
|
|
|
Вид нелинейной коррекции |
|
|
|
|||||
схема 1 и схема 3 |
|
|
|
|
схема 2 |
|
|
||||||
ант |
|
|
|
|
|
|
|||||||
W (p) = 1/(a |
p2 |
+ a |
p) |
W (p) = 1/(a |
p2 |
+ 1) |
W (p) = 1/(a |
p + 1) |
|||||
|
|||||||||||||
|
л |
1 |
|
2 |
|
л |
3 |
|
|
л |
4 |
|
|
1 |
a1 = 1.00 |
|
|
a2 = 0.20 |
|
a3 = 1.00 |
|
|
a4 = 10.0 |
||||
2 |
a1 = 1.44 |
|
|
a2 = 0.48 |
|
a3 = 1.44 |
|
|
a4 = 11.0 |
||||
3 |
a1 = 1.69 |
|
|
a2 = 0.78 |
|
a3 = 1.69 |
|
|
a4 = 12.0 |
||||
4 |
a1 = 1.96 |
|
|
a2 = 1.12 |
|
a3 = 1.96 |
|
|
a4 = 13.0 |
||||
5 |
a1 = 2.25 |
|
|
a2 = 1.50 |
|
a3 = 2.25 |
|
|
a4 = 14.0 |
||||
6 |
a1 = 2.56 |
|
|
a2 = 1.60 |
|
a3 = 2.56 |
|
|
a4 = 15.0 |
||||
7 |
a1 = 2.89 |
|
|
a2 = 2.18 |
|
a3 = 2.89 |
|
|
a4 = 16.0 |
||||
8 |
a1 = 3.24 |
|
|
a2 = 1.08 |
|
a3 = 3.24 |
|
|
a4 = 17.0 |
||||
9 |
a1 = 3.61 |
|
|
a2 = 0.76 |
|
a3 = 3.61 |
|
|
a4 = 18.0 |
||||
10 |
a1 = 4.00 |
|
|
a2 = 0.40 |
|
a3 = 4.00 |
|
|
a4 = 19.0 |
||||
Содержание отчета
1.Титульный лист.
2.Цель работы.
3.Расчетные схемы согласно варианту, выполненные в Matlab Simulink.
4.Графики переходных характеристик по каждой схеме до и после коррекции.
5.Выводы по влиянию коррекции на динамические характеристики.
12
Контрольные вопросы
1.Преднамеренные и непреднамеренные нелинейности.
2.Задачи коррекции нелинейных систем.
3.Методы нелинейной коррекции.
4.Методика синтеза линейных корректирующих систем.
5.Гармоническая линеаризация.
Лабораторная работа 4. ИССЛЕДОВАНИЕ МЕТОДА ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИИ
Цель работы – применение метода вибрационной линеаризации для коррекции нелинейных систем в режимах вынужденных периодических движений.
4.1. Общие сведения
Вибрационная линеаризация применяется для систем, линейная часть которых может рассматриваться как фильтр низких частот и осуществляется за счет приложения к нелинейной системе дополнительных периодических сил достаточно высокой частоты и амплитуды. Изначально эмпирический метод. Теоретическое обоснование вибрационной линеаризации было предложено А. А. Красовским для нелинейностей типа «зона нечувствительности» и «насыщение».
В работе рассматривается система, содержащая нелинейный элемент
(рис. 4.1).
z
y |
|
|
|
W1(p) |
(z) |
W2(p) |
W3(p) |
|
|
|
|
Рис. 4.1. Схема исследуемой нелинейной системы
При этом предполагается последовательное исследование свойств системы с нелинейными характеристиками, приведенными на рис. 1.1.
Линейные части системы описываются передаточными функциями
W p |
1 |
|
, W |
p |
T2 p 1 |
|
, W p |
1 |
. |
|
|
|
|
||||||
1 |
T1 p 1 |
2 |
T3 p 1 |
3 |
T3 p 1 |
||||
|
|
|
|
||||||
13
Входное воздействие y – синусоидальное, с амплитудой U и частотой ω, выраженной в рад/с. Дополнительное высокочастотное воздействие z имеет частоту в 10 и более раз превышающую ω и амплитуду B. Для лабораторной работы частоту высокочастотного воздействия принять равной 10∙ω.
4.2.Порядок выполнения работы
1.Создать новую модель в Matlab Simulink: New Simulink Model.
2.Во вкладке Configuration Parameters/Solver задать настройки расчета переходных процессов type – fixed step; step size – 1e–4.
3.Собрать в Matlab Simulink расчетную схему, соответствующую структурной схеме (рис. 4.1) по заданию из таблицы вариантов. Для нечетных вариантов использовать источник синусоидальной вибрации, для четных – ли- нейно-изменяющийся сигнал в диапазоне от –B до B.
4.Создать в том же самом файле модели еще двух копий расчетной схемы, из обеих копий убрать дополнительное вибрационное воздействие, из одной копии убрать нелинейность.
5.С помощью блока Mux объединить выходы блоков, реализующих W3(p) в один сигнал и вывести его на блок Scope, отключив предварительно в
настройках блока Scope ограничение на количество отображаемых точек.
6. С помощью встроенных средств Matlab Simulink построить ЛАХ линейной части системы: выход источника основного синусоидального воздействия пометить как Open-loop Input, а выход W3(p) расчетной схемы без не-
линейности как Open-loop Output; затем с помощью Linear Analysis Tool, открываемый через пункт меню Analysis Control Design Linear Analysis,
построить диаграмму Боде.
7.Оценить по диаграмме Боде возможность применения вибрационной линеаризации для своего варианта линейной части системы; при невозможности применения вибрационной линеаризации к параметрам своего варианта допускается скорректировать один из параметров своего варианта для обеспечения дальнейшего хода работы.
8.Меняя амплитуду В вибрационного воздействия, подобрать такое значение, при котором нелинейность будет вносить минимальные изменения.
9.Повторить п. 8 для всех типов нелинейностей, представленных на рис. 1.1.
14
Вариант |
|
|
|
Параметр |
|
|
|
||
a |
b |
c |
T1 |
T2 |
T3 |
U |
ω |
||
|
|||||||||
1 |
0.50 |
1.0 |
1 |
0.010 |
0.001 |
0.010 |
2.0 |
100 |
|
2 |
0.20 |
1.5 |
1 |
0.001 |
0.020 |
0.010 |
3.0 |
10 |
|
3 |
0.40 |
0.5 |
2 |
0.200 |
0.050 |
0.002 |
0.5 |
1 |
|
4 |
0.05 |
0.1 |
2 |
0.008 |
0.008 |
0.010 |
8.0 |
50 |
|
5 |
1.00 |
2.0 |
2 |
0.030 |
0.001 |
0.010 |
4.0 |
150 |
|
6 |
1.00 |
1.3 |
3 |
0.005 |
0.100 |
0.009 |
5.0 |
80 |
|
7 |
0.50 |
0.8 |
3 |
0.040 |
0.020 |
0.100 |
0.8 |
5 |
|
8 |
0.20 |
1.0 |
1 |
0.100 |
0.004 |
0.020 |
3.5 |
200 |
|
9 |
0.30 |
1.0 |
1 |
0.009 |
0.001 |
0.050 |
10.0 |
90 |
|
10 |
1.00 |
2.0 |
2 |
0.002 |
0.300 |
0.010 |
1.0 |
10 |
|
Содержание отчета
1.Титульный лист.
2.Цель работы.
3.Расчетные схемы согласно варианту, выполненные в Matlab Simulink.
4.ЛАХ для линейной части системы.
5.Значения амплитуды вибрации и траектории движения выходной переменной для каждой исследуемой нелинейности и системы без учета нелинейности.
7.Выводы.
Контрольные вопросы
1.Для каких систем применим метод вибрационной линеаризации?
2.Какую форму должно иметь вибрационное воздействие?
3.Где на практике применяется данный метод линеаризации?
4.Какие ограничения накладываются на вибрационное воздействие?
5.Для каких нелинейностей применима вибрационная линеаризация?
Лабораторная работа 5. ИССЛЕДОВАНИЕ ФАЗОВЫХ ТРАЕКТОРИЙ РЕЛЕЙНОЙ СИСТЕМЫ
Цель работы – исследование фазовых траекторий релейных систем с различными типами релейных характеристик.
5.1. Общие сведения
Релейные системы автоматического управления относятся к классу систем дискретного действия, поскольку выходная величина релейного элемента представляет собой дискретный сигнал и изменяется во времени скачками.
15