Материал: Sb96728
МИНОБРНАУКИ РОССИИ
__________________________________________________________________
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В. И. Ульянова (Ленина)
_____________________________________________
Б. В. БРУСЛИНОВСКИЙ Н. А. ДОБРОСКОК А. Н. ЛУКИЧЕВ
ЛАБОРАТОРНЫЙ ПРАКТИКУМ ПО НЕЛИНЕЙНЫМ СИСТЕМАМ УПРАВЛЕНИЯ
Учебно-методическое пособие
Санкт-Петербург Издательство СПбГЭТУ «ЛЭТИ»
2018
УДК 681.511.4(07)
ББК З 965.5я7 Б89
Бруслиновский Б. В., Доброскок Н. А., Лукичев А. Н.
Б89 Лабораторный практикум по нелинейным системам управления: учеб.- метод. пособие. к лаб. работам по дисциплине «Нелинейные системы управления» СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2018. 32 с.
ISBN 978-5-7629-2269-2
Содержит методические рекомендации к выполнению лабораторных работ по дисциплине «Нелинейные системы управления».
Предназначено для студентов, обучающихся по направлению 27.03.04 «Управление в технических системах», может быть полезно инженернотехническим работникам этой сферы деятельности.
УДК 681.511.4(07)
ББК З 965.5я7
Рецензент: канд. техн. наук К. С. Ляпидов (филиал «ЦНИИ СЭТ» ФГУП «Крыловский государственный научный центр»)
Утверждено редакционно-издательским советом университета
в качестве учебно-методического пособия
ISBN 978-5-7629-2269-2 |
© СПбГЭТУ «ЛЭТИ», 2018 |
Лабораторная работа 1. ИССЛЕДОВАНИЕ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ТИПОВЫХ НЕЛИНЕЙНОСТЕЙ
Цель работы – исследование статических характеристик нелинейных звеньев; построение результирующих характеристик типовых соединений звеньев.
1.1.Общие сведения
Вавтоматических системах управления существуют элементы, зависимость между входом и выходом которых описывается нелинейными уравнениями. Нелинейные элементы делятся на преднамеренные и непреднамеренные. Преднамеренные элементы специально вводятся в проектируемую систему для придания ей специфических свойств, которые невозможно получить при использовании устройств с линейными характеристиками. Непреднамеренные нелинейности имеют нелинейную характеристику в силу физических законов, на основании которых они функционируют.
Статические характеристики нелинейных элементов имеют ряд общих свойств: симметричность, однозначность и гладкость.
Последнее свойство делит нелинейные характеристики на существенные и несущественные. Характеристики существенных нелинейностей содержат точки, в которых производная от выходного сигнала по входному не определена (например, характеристика с насыщением или зоной нечувствительности), в то время как несущественная нелинейная функция, а также еѐ первая, вторая и т. д. производные непрерывны на всѐм диапазоне изменения входного сигнала (функции синуса, косинуса, степенная функция).
Некоторые нелинейные элементы ввиду особенностей их характеристик и интенсивности использования в составе систем управления отнесены к категории типовых нелинейностей. Обычно для их представления используют не реальную характеристику, а кусочно-линейную аппроксимацию, как показано на рис. 1.1. Особенности таких характеристик будут исследованы в лабораторной работе.
Системы автоматического управления, содержащие нелинейные элементы, называются нелинейными. Процессы в таких системах имеют целый ряд существенных особенностей, которые не присущи линейным системам.
3
|
z |
z |
|
z |
|
|
|
c |
|
c |
|
a |
x |
a |
x |
b a |
x |
|
а |
а |
|
а |
b |
|
|
c |
|
c |
|
|
а |
б |
|
в |
|
|
z |
z |
|
z |
|
|
c |
c |
|
c |
|
|
x |
a |
x |
a |
x |
|
|
а |
|
а |
|
|
c |
c |
|
c |
|
|
г |
д |
|
е |
|
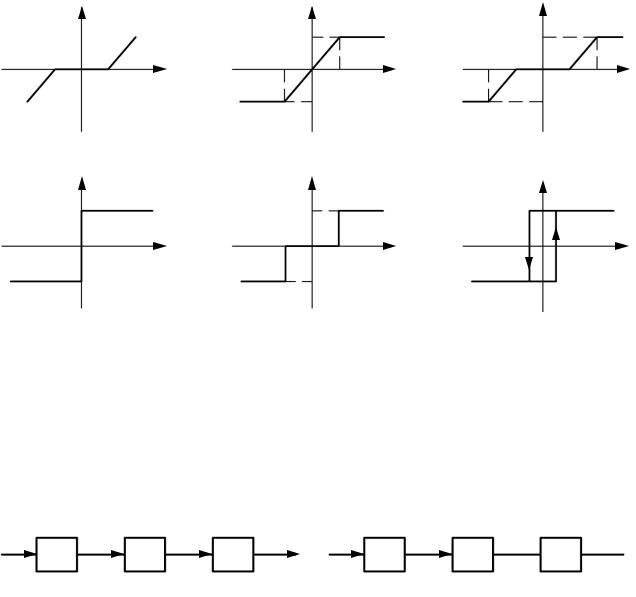
Рис. 1.1. Графики статических характеристик типовых нелинейных элементов:
а– зона нечувствительности; б – насыщение; в – зона нечувствительности с насыщением;
г– двухпозиционное реле; д – трехпозиционное реле; е – гистерезис
Для нелинейных систем невыполним принцип коммутативности, что усложняет по сравнению с линейными системами структурные преобразования. Проверить это свойство можно построением результирующих характеристик, например, последовательного соединения звеньев нескольких нелинейных элементов для вариантов, приведенных на рис. 1.2.
x |
1(x) |
y |
2(y) |
w |
3(w) |
z |
x |
2(x) |
y |
1(y) |
|
|
|
|
|
|
|||||
|
|
|
a |
|
|
|
|
|
|
б |
w  3(w) z
3(w) z 
Рис. 1.2. Статические характеристики типовых соединений нелинейных элементов: а – прямой порядок звеньев; б – измененный порядок звеньев
Кроме того, к особенностям нелинейных систем относятся: невыполнение принципа суперпозиции; возникновение периодических колебаний, называемых автоколебаниями; возможность нескольких равновесных состояний, часть из которых может быть устойчива, а другая нет; переход из одного установившегося движения в другое под действием внешних сил.
1.2.Порядок выполнения работы
1.Создать новую модель в Matlab Simulink: New Simulink Model.
2.Во вкладке Configuration Parameters/Solver задать настройки расчета переходных процессов type – fixed step; step size – 1e–4.
4
3. Для каждой из нелинейностей (рис 1.1) построить статическую характеристику с параметрами, заданными в табл. 1.1. Для построения статических характеристик использовать блоки библиотеки Simulink\Discontinuties: Dead Zone (зона нечувствительности); Relay (двухпозиционное реле с гистерезисом); Saturation (насыщение).
|
|
|
|
|
|
Таблица 1.1 |
|
|
|
|
|
|
|
|
|
Вари- |
|
|
Тип нелинейности (x) |
|
|
||
|
рис. 1.1, б |
рис. 1.1, в |
|
рис. 1.1, д |
рис. 1.1, е |
||
ант |
рис. 1.1, а |
рис. 1.1, г |
|||||
(c = 1) |
(c = 1) |
(c = 1) |
(c = 1) |
||||
|
|
|
|||||
1 |
а = 0.9 |
a = 1.1 |
a = 0.1, b = 1.1 |
c = 0.2 |
a = 0.3 |
a = 0.30 |
|
2 |
а = 0.1 |
a = 1.2 |
a = 0.2, b = 1.2 |
c = 0.3 |
a = 0.3 |
a = 0.35 |
|
3 |
а = 0.1 |
a = 1.3 |
a = 0.4, b = 1.4 |
c = 0.4 |
a = 0.1 |
a = 0.10 |
|
4 |
а = 0.2 |
a = 1.4 |
a = 0.3, b = 1.3 |
c = 0.5 |
a = 0.2 |
a = 0.15 |
|
5 |
а = 0.3 |
a = 1.5 |
a = 0.5, b = 1.5 |
c = 0.6 |
a = 0.2 |
a = 0.20 |
|
6 |
а = 0.4 |
a = 1.6 |
a = 0.2, b = 1.2 |
c = 0.7 |
a = 0.2 |
a = 0.25 |
|
7 |
а = 0.5 |
a = 1.7 |
a = 0.3, b = 1.3 |
c = 0.8 |
a = 0.7 |
a = 0.40 |
|
8 |
а = 0.5 |
a = 1.8 |
a = 0.1, b = 1.1 |
c = 0.9 |
a = 0.4 |
a = 0.45 |
|
9 |
а = 0.3 |
a = 1.9 |
a = 0.5, b = 1.5 |
c = 1.0 |
a = 0.6 |
a = 0.10 |
|
10 |
а = 0.4 |
a = 2.0 |
a = 0.2, b = 1.2 |
c = 0.1 |
a = 0.5 |
a = 0.20 |
|
4. В качестве входного сигнала использовать элемент Sine Wave. При этом параметры задать так, чтобы амплитуда синусоидального сигнала была больше значения характерных точек нелинейностей, а период составил 2 с.
|
|
|
Таблица 1.2 |
|
|
|
|
Вари- |
|
Тип нелинейности (x) |
|
ант |
1(x) |
2(y) |
3(w) |
1 |
рис. 1.1 б: a = 2, c = 5 |
рис. 1.1 д: a = 1, c = 3 |
w2 |
2 |
рис. 1.1 б: a = 2, c = 5 |
рис. 1.1 д: a = 1, c = 3 |
w3 |
3 |
рис. 1.1 б: a = 2, c = 5 |
рис. 1.1 а: a = 0.5 |
w2 |
4 |
рис. 1.1 б: a = 2, c = 5 |
рис. 1.1 а: a = 0.5 |
w3 |
5 |
рис. 1.1 г: с = 4 |
рис. 1.1 а: a = 0.5 |
w2 |
6 |
рис. 1.1 г: с = 4 |
рис. 1.1 а: a = 0.5 |
w3 |
7 |
рис. 1.1 а: a = 0.5 |
рис. 1.1 д: a = 1, c = 3 |
w2 |
8 |
рис. 1.1 а: a = 0.5 |
рис. 1.1 д: a = 1, c = 3 |
w3 |
9 |
рис. 1.1 а: a = 0.5 |
рис. 1.1 e: a = 2, c = 2 |
w2 |
10 |
рис. 1.1 а: a = 0.5 |
рис. 1.1 e: a = 2, c = 2 |
w3 |
5. Во второй части работы построить схему результирующей характеристики последовательного соединения звеньев (рис. 1.2, а) согласно варианту из табл. 1.2. Затем поменять местами первые две нелинейности и снова построить схему результирующей характеристики последовательного соединения звеньев (рис. 1.2, б).
5