Материал: Sb96728
5. Выводы по исследованию реакции импульсной системы на изменение параметров частотно-импульсного модулятора.
Контрольные вопросы
1.Дайте определение ЧИМ.
2.Опишите принцип работы частотно-импульсного модулятора.
3.Регулирование каких параметров частотно-импульсного модулятора оказывает влияние на качество выходного сигнала импульсной системы с ЧИМ?
4.Какую форму принимает входной сигнал на выходе частотноимпульсного модулятора?
5.Приведите примеры применения импульсных систем с ЧИМ.
Лабораторная работа 8. ИССЛЕДОВАНИЕ ИМПУЛЬСНОЙ СИСТЕМЫ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ
Цель работы – исследование реакции импульсной системы на изменение параметров широтно-импульсного модулятора.
8.1. Общие сведения
Широтно-импульсная модуляция (ШИМ) – это способ формирования импульсных сигналов в системах управления, состоящий в изменении длительности при неизменной частоте следования импульса. В зависимости от реализации ШИМ можно разделить на аналоговый и цифровой.
Вработе рассмотрен пример применения ШИМ-генератора аналогового типа для решения задачи стабилизации тока, протекающего через активноиндуктивную нагрузку.
ВШИМ-генераторах аналогового типа, управляющий сигнал формируется аналоговым компаратором, когда на инвертирующий вход компаратора подается треугольный или пилообразный сигнал («пила»), называемый также опорным, а на неинвертирующий – модулирующий непрерывный сигнал.
Выходные импульсы ШИМ-модулятора имеют прямоугольную форму, частота их следования равна частоте «пилы». Длительность импульса зависит от времени, в течение которого уровень модулирующего сигнала превышает уровень «пилы». В случае, когда уровень «пилы» выше уровня модулирующего сигнала, на выходе будет нулевая часть импульса.
26
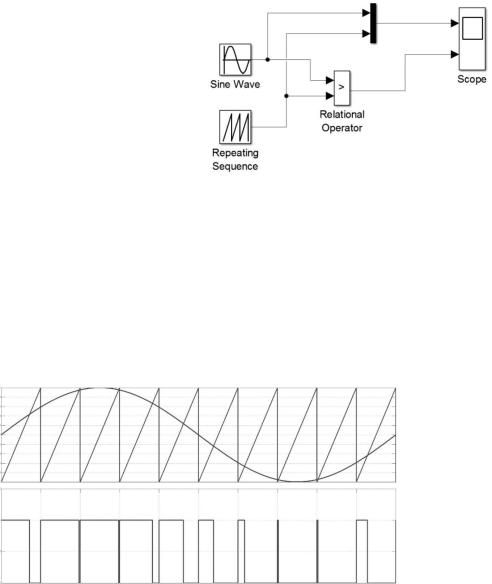
Для получения первого представления о принципе работы ШИМ, необходимо в программной среде Matlab Simulink собрать схему, изображенную на рис. 8.1. Для наглядности аналоговый компаратор заменяется блоком
сравнения Relational Operator библиотеки Similink/Logical Operations, в кото-
ром верхний вход эквивалентен неинвертирующему входу аналогового компаратора, а нижний, соответственно, инвертирующему. На входы блока Relational Operator поступают:
–модулирующий сигнал синусоидальной формы с блока Sine Wave;
–опорный сигнал пилообразной формы с блока Repeating Sequence. Результаты моделирования схемы получения ШИМ-сигнала приведены
на рис. 8.2.
Рассмотрим работу ШИМ-генератора на примере модели импульсного стабилизатора тока.
Uвх,
В
0.0
Uвых,
В
0.0
0.0 |
t, c |
|
Рис. 8.2. Результаты моделирования схемы ШИМ
На практике этот вид стабилизаторов часто применяется в системах заряда аккумуляторных батарей для ограничения зарядного тока, а также для ликвидации токового броска при подключении емкостной нагрузки к источнику постоянного напряжения. Как правило, для управления током нагрузки применяется единственный силовой ключ (IGBT-модуль), управляемый ШИМ-генератором. Модель стабилизатора тока в Matlab Simulink приведена на рис. 8.3.
27
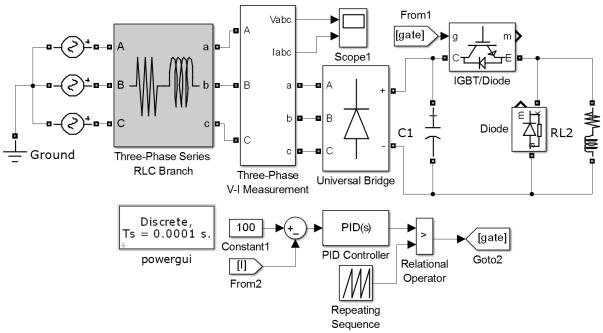
Рис. 8.3. Модель стабилизатора тока в Matlab Simulink
Импульсный стабилизатор тока в данном случае работает на активноиндуктивную нагрузку и имеет обратную связь по току нагрузки. Управление силовым ключом осуществляется сигналом gate. Подстройкой ПИДрегулятора обеспечивается заданные показатели качества регулирования тока нагрузки.
8.2. Порядок выполнения работы
1.Создать новую модель в Matlab Simulink: New Simulink Model.
2.Во вкладке Configuration Parameters/Solver задать настройки расчета переходных процессов type – fixed step; step size – 1e–4.
3.Для обеспечения работы модели добавить блок powergui с параметра-
ми Simulation time – Discrete; Solver type – Tustin; Sample time – 1e–4.
4.Собрать схему импульсного стабилизатора тока, задать параметры сети, опорного сигнала («пилы»). Задания тока и нагрузки выбрать по таблице вариантов.
5.Подобрать параметры ПИД-регулятора таким образом, чтобы в модели обеспечивалась стабилизация заданного значения тока. Полученные в блоке Scope графики и параметры ПИД-регулятора привести в отчете.
6.Исследовать влияние частоты опорного сигнала на качество стабилизации тока.
28
|
Lвх, |
Rвх, |
С1, |
|
Параметры нагрузки |
|
Параметры опор- |
|||
Вариант |
Uвх, В |
Iз, А |
ного сигнала |
|||||||
мГн |
Ом |
мФ |
|
|
||||||
|
|
Rн, Ом |
Lн, мГн |
|
Uоп, В |
fоп, кГц |
||||
|
|
|
|
|
|
|||||
1 |
2 |
0.01 |
7 |
100 |
0.01 |
10 |
100 |
1.0 |
1.0 |
|
2 |
2 |
0.01 |
7 |
120 |
0.15 |
11 |
110 |
1.5 |
1.1 |
|
3 |
2 |
0.01 |
7 |
140 |
0.20 |
9 |
120 |
1.2 |
1.6 |
|
4 |
2 |
0.01 |
7 |
160 |
0.07 |
8 |
130 |
3.0 |
1.5 |
|
5 |
2 |
0.01 |
7 |
180 |
0.13 |
7 |
140 |
1.5 |
1.4 |
|
6 |
2 |
0.01 |
7 |
200 |
0.10 |
12 |
150 |
1.5 |
1.3 |
|
7 |
2 |
0.01 |
7 |
180 |
0.13 |
13 |
160 |
2.0 |
1.7 |
|
8 |
2 |
0.01 |
7 |
160 |
0.18 |
14 |
170 |
2.5 |
1.9 |
|
9 |
2 |
0.01 |
7 |
130 |
0.09 |
15 |
180 |
1.8 |
2.5 |
|
10 |
2 |
0.01 |
7 |
100 |
0.11 |
10 |
190 |
2.5 |
2.0 |
|
Содержание отчета
1.Титульный лист.
2.Цель работы.
3.Расчетные схемы согласно варианту, выполненные в Matlab Simulink.
4.Осциллограммы исследуемых переменных.
5.Выводы по исследованию реакции импульсной системы на изменение параметров широтно-импульсного модулятора.
Контрольные вопросы
1.Дайте определение ШИМ.
2.Опишите алгоритм формирования синусоидального ШИМ-сигнала.
3.Что представляет собой импульсный стабилизатор тока? Перечислите основные функции.
4.Перечислите основные способы поддержания качества стабилизированного тока.
5.В чем заключаются опасности работы IGBT-модуля?
29
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Афанасьев В. Н. Математическая теория конструирования систем управления: учеб. пособие. 3-е изд., испр. и доп. М.: Высш. шк., 2004.
Бесекерский В. А., Попов Е. И. Теория систем автоматического управления. 4-е изд., перераб. и доп. СПб.: Профессия, 2003.
Зайцев Г. Ф., Стеклов В. К. Компенсация естественных нелинейностей автоматических систем. М.: Энергоатомиздат, 1982.
Математические основы теории автоматического управления: учебник в 3 т. Т. 1, 3-е изд., перераб. и доп. / под ред. Б. К. Чемоданова. М.: Изд-во МГТУ им. Н. Э. Баумана, 2006.
Математические модели, динамические характеристики и анализ систем автоматического управления // Методы классической и современной теории автоматического управления: учебник в 5 т. Т. 1, 2-е изд., перераб. и доп. / под ред. К. А. Пупкова, Н. Д. Егупова. М.: Изд-во МГТУ им. Н. Э. Баумана, 2004.
Мирошник И. В. Теория автоматического управления. Нелинейные и оптимальные системы. СПб.: Питер, 2006.
Пальтов И. П. Нелинейные методы исследования автоматических систем. Л.: Энергия, 1976.
Пальтов И. П., Попов Е. П. Приближенные методы исследования нелинейных автоматических систем. М.: Физ.-мат. лит., 1960.
Первозванский А. А. Курс теории автоматического управления: учеб. пособие. М.: Наука, 1986.
Петров В. В., Гордеев А. А. Нелинейные сервомеханизмы. М.: Машиностроение, 1979.
Попов Е. П. Прикладная теория процессов управления в нелинейных системах. М.: Наука, 1973.
Теория автоматического управления: учебник для вузов по спец. «Автоматика и телемеханика»: в 2 ч. Ч. II. Теория нелинейных и специальных систем автоматического управления / под ред. А. А. Воронова. М.: Высш. шк.,
1986.
Юревич Е. И. Теория автоматического управления. М.: Энергия, 1969.
30